扰动可变双切换系统的稳定性分析与控制研究
2024-01-08 07:56穆倩倩余丽静
贵州师范学院学报 2023年12期
穆倩倩,余丽静*,李 斌
(1.贵州师范学院数学与大数据学院,贵州 贵阳 550018;2.中国铁塔股份有限公司贵州省分公司,贵州 贵阳 550081)
0 引言
切换系统作为一类典型的混杂系统,根据其切换机制的不同,通常可以分为确定性切换系统和随机性切换系统。确定性切换系统可以通过设计切换规则使系统达到稳定状态,目前的研究已经取得了丰硕的成果。针对时变切换系统,通过引入公共不定差分Lyapunov函数和多个不定差分Lyapunov函数,分别给出了时变离散切换系统渐近稳定的保守性较小的充分条件[1]。Yuqian 通过推导协方差矩阵列叠加形式的动力学特性方程,得到了离散时间线性切换系统在建模随机切换下均方稳定的充要条件[2]。王眷卫设计了一种应用于核电厂BUP控制模式的切换方案,用于控制不同模式下的切换与性能分析[3]。随机切换系统的子系统服从随机过程分布,通常用马尔可夫跳变过程来描述。关于随机切换系统的稳定性问题已有很多成果。例如,马尔可夫跳跃系统中的随机稳定[4-6],几乎处处稳定[7],全局指数稳定均已被研究。针对该类问题应多利用随机过程理论结合概率分布等分析方法研究系统稳定的充分条件。
随着现代工业的发展,单一切换机制的系统已很难满足复杂系统的建模。例如在具有多个控制回路的系统中,各子回路由一个确定性指令对其控制,而在不同回路中可能存在差异化的随机故障、时延及丢包等问题。因此,部分学者提出了双切换系统模型用于该类复杂系统的建模。双切换系统同时包含了上述两类切换子系统,即确定性切换子系统和随机切换子系统,因此又被称为两层切换系统。其中,确定性子系统之间的运行由确定性切换信号控制。而随机切换子系统之间的切换是随机的,不受随机信号控制。因马尔可夫过程具有无后效性,现实世界中可以用来描述很多随机过程,所以在双切换系统的研究中常采用马尔可夫过程描述随机切换子系统。近年来,双切换模型正逐渐应用于疫情传染模型、多回路网络控制系统、容错系统、具有储能单元的风力发电系统等[8-9]领域。
双切换系统依据随机切换子系统的状态转移速率是否变化,又可以分为固定双切换和可变双切换。若由不同马尔可夫链描述的随机子系统其状态转移速率是不变的,则称为固定双切换;相反的,当不同随机子系统的状态转移是可变的,那么则称为可变双切换。虽然双切换系统模型在实际应用中具有适应性,但针对此类系统的研究较少。稳定性分析作为切换系统研究的关键问题,吸引了学者们的关注。丁文淞针对一类具有指数不确定性的双切换系统的鲁棒镇定,通过设计确定性切换律和状态反馈控制器,研究其鲁棒镇定问题[10]。Song研究了切换马尔可夫跳跃线性系统,利用驻留时间分析双切换线性系统的均方稳定性[11]。席敏针对具有指数不确定性的离散时间双切换线性正系统,通过构建Co-positive Lyapunov能量衰减函数,给出了在持续驻留时间约束下的鲁棒指数几乎处处稳定的充分条件[12]。
综上所述,文献[10]研究了鲁棒几乎处处渐近稳定,由于系统包含有指数不确定性,因此系统利用了状态观测器,并且对达到稳定的约束条件要求更高。文献[11]针对固定和可变双切换进行了研究,研究任意切换信号下的指数稳定性,保守性更高。文献[12]研究的是特殊的线性双切换正系统,要求初始条件和输入为非负值,适用范围将受到影响。因此,不同于以往的研究,本文创新性地考虑了一类具有扰动的可变双切换线性系统。由于在双切换系统中转移速率是可变的,这导致了马尔可夫模态遍历性不再有效,这给系统稳定性的分析带来了挑战。同时,随着现代工业系统的日渐复杂,对于系统的控制精度要求越来越高。而在实际系统中,扰动是必不可少的,严重的情况将直接导致系统的发散和振荡,因此对于扰动双切换系统的研究是非常必要和有价值的。
本文针对一类具有扰动的可变双切换线性系统,通过选取合理的随机多李雅普诺夫函数作为能量函数,基于期望能量最小原则来设计确定性切换信号,并且给出了系统达到几乎处处全局渐近稳定的充分条件。从而保证在切换信号控制下,即使同时存在扰动和不稳定子系统,双切换系统仍然能够达到稳定。
1 预备知识
1.1 系统描述
考虑如下具有扰动的双切换线性系统:
(1)
注1 根据子系统切换机制不同,将切换序列分为确定切换序列(t部分)和随机切换序列(τ部分)。研究中,均假定两部分的长度是有限的,即切换时间间隔是有限的,以保证整个切换系统的稳定性。该假设亦符合实际应用系统情况。
1.2 马尔可夫过程相关性质
假定确定性切换信号γ(t)是良定的,马尔可夫过程的转移概率定义为:
(2)


1.3 主要定义
在本文中,我们研究了具有扰动的可变双切换线性连续系统(1)的几乎处处全局渐近稳定。为此,几乎处处全局渐近稳定的定义如下:
定义1.2 如果以下两个条件满足的话,则系统是几乎处处全局渐近稳定的:
Sp1)对于任意的ε>0,存在δ(ε)>0,当x0<δ(ε)时,P{supt≥0x(t)<ε}=1;

2 稳定性分析
本节将利用概率分析方法和强大数定律,基于期望能量最小原则设计切换信号,研究带有扰动的可变双切换线性连续时间系统(1)中的几乎处处全局渐近稳定性,并给出系统稳定的充分条件。


那么,在如下确定性切换策略控制下,可变双切换线性连续时间系统(1)是几乎处处全局渐近稳定的。




(3)
接下来,对于上式(3),利用邓金公式(Dynkin's formula)联合定理2.1中的(H3)切换规则,可以得出下式:
将上述结论应用到整个系统运行时间段内t∈[0,t),
(4)
(5)

注2 由不同马尔可夫链描述的确定子系统在切换时是不连续的,因为不同子系统模式之间的切换由不同的马尔可夫链控制,这导致了马尔可夫链遍历性失效的问题。因此,需要对马尔可夫链进行瞬态分析。在几乎处处全局渐近指定稳定性条件SP1的证明过程中,应用瞬态分析很好地解决遍历性失效问题。
(t))]最小的确定子系统切入,很好地解决了这个问题。
3 应用仿真
多回路网络控制系统是由多个回路控制器组成,每个控制器控制一个或者多个被控制对象。在现代工业应用中,多回路网络控制系统已经广泛应用于工业系统、多目标追踪系统、飞行控制等多个领域。当前在多回路网络控制系统中通过调度来保证子回路之间的协调,以完成复杂的工业系统应用。调度是指决定启动或终止每个回路控制器以及分配他们优先级。调度策略是否合理将直接对系统的响应速度,可靠性以及鲁棒性造成影响。调度问题是多回路网络系统控制问题的关键问题之一。
针对多回路网络控制系统,依据其运行机制,建模方法也大不相同。针对有数据包位移的网络控制系统模型,可将其建模为多通道数据包无序MIMO系统。针对具有噪声,传输时滞以及系统中存在不确定性的网络控制系统,建模为具有故障恢复的MIMO离散时间系统。本节中将针对具有扰动和丢包的多回路网络控制系统建模为扰动可变双切换模型,多回路网络控制系统结构如图1所示。系统中的调度便由所研究的双切换系统中的确定性切换信号来进行控制。首先,控制器生成的控制信号由确定性切换信号来切入到传输网络中,完成控制信号和网络回路的调度。若γ(t)=1,则将控制信号传入第一个网络回路中用于控制第一个被控对象。
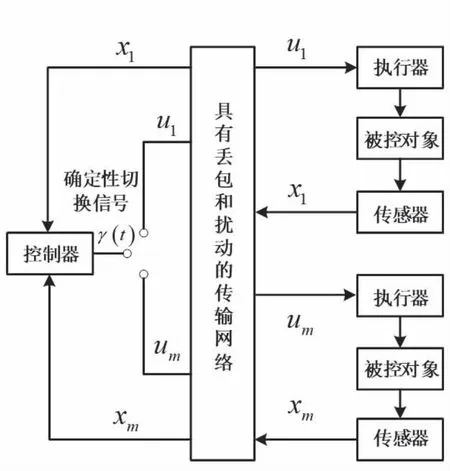
图1 多回路网络控制系统结构
而在传输网络中,由于受到扰动及其他因素的影响,存在随机的数据包丢失的情况,将其描述为马尔可夫过程,定义随机丢包过程具有如下的两个模态:

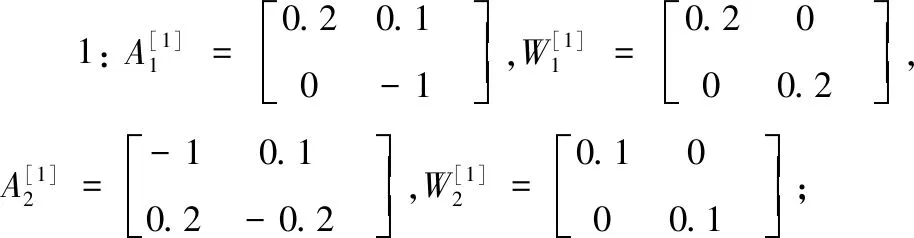
定义双切换线性连续时间系统的两个子系统分别如下:

通过定理2.1中给出的条件(H2),利用LMI工具箱可以求解矩阵P如下:
定义系统状态初始值为x0=[2,-1],时间t∈[0,5],并且每隔0.05进行采样。依据定理2.1(H3)设计的切换规则,计算每个子系统的李雅普诺夫能量函数,保证期望能量最小的被控回路始终被调度,保证系统稳定的稳定性。所设计确定子系统切换路径如图2所示,两个被控对象被有序调度。在切换路径的控制下,系统状态快速收敛达到稳定。

图2 确定子系统切换路径
双切换系统包含了马尔可夫随机子系统,为了消除其随机性对仿真结果带来的干扰,实验过程中采用了5次运行结果,观察系统状态轨迹lnx(t)如图3所示。由图可以看出,在多次实验仿真下,系统状态轨迹lnx(t)在100个采样点后均为负值并且一直衰减,即系统状态能够在5秒内趋于0且具有较好的收敛速度,表明方案对于系统的可控性好。
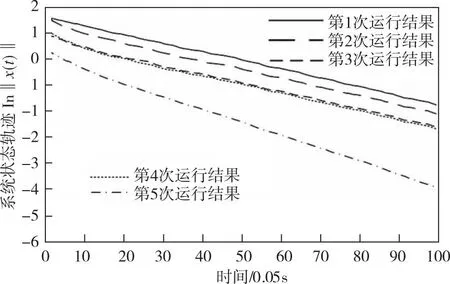
图3 系统状态轨迹
4 结论
本文研究一类具有扰动的可变双切换线性系统,利用概率分析方法和随机多李雅普诺夫函数方法,基于马尔可夫暂态分析来解决系统中的转移速率可变问题,然后通过期望能量最小方法设计切换信号,保证在所设计的切换信号下,系统达到几乎处处全局渐近稳定,并给出了稳定的充分条件。最后将该模型应用于多回路网络控制系统中并给出了仿真算例,实验结果表明所设计方案能满足系统的调度需求,使系统快速达到稳定状态,所设计方案是合理有效的。下一步研究课题可尝试将此研究成果推广到可变双切换非线性系统。
猜你喜欢
社会科学战线(2022年7期)2022-08-26
数学物理学报(2022年4期)2022-08-22
法律方法(2022年1期)2022-07-21
社会科学战线(2022年3期)2022-06-15
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
社会科学(2016年6期)2016-06-15
数学理论与应用(2016年3期)2016-05-17
核科学与工程(2015年3期)2015-09-26
电源技术(2015年11期)2015-08-22