基于人工势能场的破冰船护航下船舶航行风险场建模
2024-01-15 05:34张笛韩吉如吴达曹伟张明阳毛文刚
哈尔滨工程大学学报 2024年1期
张笛, 韩吉如,, 吴达,4, 曹伟, 张明阳, 毛文刚
(1.水路交通控制全国重点实验室(武汉理工大学),湖北 武汉 430063; 2.武汉理工大学 交通与物流工程学院, 湖北 武汉 430063; 3.武汉理工大学 智能交通系统研究中心,湖北 武汉 430063; 4.广东省内河港航产业研究有限公司,广东 韶关 512000; 5.阿尔托大学 工程学院,芬兰 赫尔辛基 02150; 6.查尔姆斯理工大学 机械与海洋科技学院,瑞典 哥德堡 SE-41296)
极地冰区船舶作业主要分为船舶独立航行和破冰船护航2种方式。船舶冰区航行面临着复杂冰情、低能见度、大风以及低温等环境因素带来的挑战[1],出于经济性和安全性的考虑,低冰级船舶在极地冰区航行主要以破冰船护航作业模式为主,破冰船护航作业是指由破冰船在前方打开一条通道,一艘或多艘低冰级跟驰船在其后保持一定的安全距离航行,形成一个整体的编队系统[2]。据统计[3],截止到2020年,我国商船北极航次中近1/3的船舶航次采用了破冰船护航作业模式。破冰船护航作业面临的风险主要有2个方面:一方面,由于编队船舶之间的安全速度和安全距离的不确定性而导致的碰撞与冰困事故时有发生。据统计,碰撞事故是破冰船护航航行作业中主要的事故类型,速度过快、距离过小导致的事故占破冰船护航时船舶事故的95%[4]。另一方面,如果编队船舶间距过大,海冰很容易涌入破冰船开辟的航路导致航路再次冰封,从而发生跟驰船的冰困事故。
对于破冰船护航下船舶航行作业模式,其安全主要受制于海冰和编队形式,面临编队船舶的速度以及船舶之间距离难以量化的问题。针对极地冰区船舶编队安全间距的问题,国内外学者针对船舶之间碰撞的风险场景展开了一系列的深入研究。Goerlandt等[2]基于船舶航行数据,分析不同冰情时船舶护航作业模式下的跟驰距离与跟驰速度。Khan等[5]基于改进的NaSch-元胞自动机模型,计算航道最大通航密度条件下的冰区编队船舶碰撞概率。李振福等[6]考虑船舶航行冰阻力条件下,基于安全距离跟驰模型提出了破冰船护航作业下船舶跟驰安全间距的估算公式。Zhang等[7]以安全距离跟驰模型为基础,针对船舶之间的碰撞风险,建立了不同海冰条件下的船舶间安全距离模型。Zhang等[8-9]研究船舶在冰区编队作业时的碰撞风险,考虑冰情的影响和安全速度的约束,建立破冰船与跟驰船耦合运动的船舶跟驰模型,模拟船舶在冰况下的跟驰特性。Boström等[10]基于专家访谈数据和问卷调查,发现在天气条件恶劣和冰情严重的条件下,两船间隔距离更小,对船舶航行安全造成巨大的威胁。目前破冰船护航下编队航行作业风险相关研究多数只针对船舶碰撞风险场景,研究编队模式下的碰撞风险及避免船舶碰撞事故的安全跟驰距离,而针对编队中跟驰船舶冰困风险及避免冰困的安全跟驰距离的研究相对较少,同时也缺乏针对船舶碰撞和冰困风险场景耦合下的编队航行安全研究。
人工势能场理论最早在1986年由Khatib提出[11],由于该理论形象易懂,被广泛应用于机器人避障领域,该理论中可以将目标周围的风险因素看作不同类型的势能场,不同的势能场会对目标的状态和行为产生影响。王建强等[12]提出基于人-车-路协同的行车安全场的概念的模型,用以表征和量化人-车-路等各要素对车辆行驶安全造成的风险,证明用人工势能场表征行车风险的可行性。彭里群等[13]将传统人工势能场进行改进,通过综合动态交通环境、驾驶意图和车辆动力学的综合影响,建立适用于汽车避碰过程中的路径规划模型。Xue等[14]基于人工势能场研究潜在的碰撞危险场景下规划安全的路径,实现船舶的航线规划和智能避碰。
本文针对破冰船护航下船舶碰撞和冰困风险,以破冰船护航下的单船跟驰场景为研究对象,基于人工势能场理论,构建破冰船护航下船舶航行风险场模型,对编队系统中船舶和海冰因素及其相互作用进行量化和表征,求解编队船舶的安全距离,为破冰船护航下船舶跟驰研究提供理论依据。
1 破冰船护航下船舶航行风险场模型
本文基于人工势能场理论提出破冰船护航下船舶航行风险场的概念,破冰船护航下船舶航行风险场是表征破冰船护航作业场景中各风险要素对跟驰船航行安全产生影响的一种人工势能场。在破冰船护航作业场景中每个能影响跟驰船航行安全的风险因素都会形成一个风险场,表征该风险因素对跟驰船航行安全的影响。
破冰船护航下船舶航行风险场如图1所示,图中破冰船护航下船舶航行风险场由与“破冰船”有关的风险场和与“海冰”有关的风险场组成:

实线:海冰风险场场强,虚线:破冰船风险场场强图1 破冰船护航下船舶航行风险场示意Fig.1 Sketch of the ship navigation risk field for icebreaker escort operations
1)破冰船风险场:由编队系统中的破冰船决定,表征破冰船对跟驰船航行安全的影响,破冰船风险场场强主要由破冰船的自身属性决定。
2)海冰风险场:由航道内的海冰决定,表征海冰对跟驰船航行安全的影响,海冰风险场场强由海冰密集度决定的。
1.1 破冰船风险场模型
1.1.1 破冰船风险场场强
破冰船对跟驰船航行安全的影响表现为:1)跟驰船与之发生碰撞的严重程度与破冰船的自身属性有关,王建强等[12]提出虚拟质量的概念来描述该物体属性能够对车辆产生的潜在碰撞风险,表征该物体与车辆发生碰撞事故的严重程度,本文参考虚拟质量提出“船舶碰撞风险系数”的概念来描述目标船舶自身属性能够对其他船舶产生的潜在碰撞风险,船舶碰撞风险系数越大,造成的事故损失越大;2)破冰船与跟驰船距离越接近,发生碰撞的可能性越大;3)跟驰船从后方靠近破冰船时所面临的危险要远大于其远离破冰船时的危险。类比电荷场强属性,位于xb处破冰船形成的风险场模型表达式为:
(1)

(2)
式中:vr=vf-vib为跟驰船与破冰船的相对速度(m/s),vf和vib分别为跟驰船和破冰船的速度(m/s);β≥0为与速度相关的待定参数。因此,将式(2)代入式(1)得到最终的破冰船风险场模型:
(3)
图2为不同相对速度下破冰船风险场示意图,图中xb为破冰船中心所在位置,纵坐标为破冰船风险场场强Eib大小。
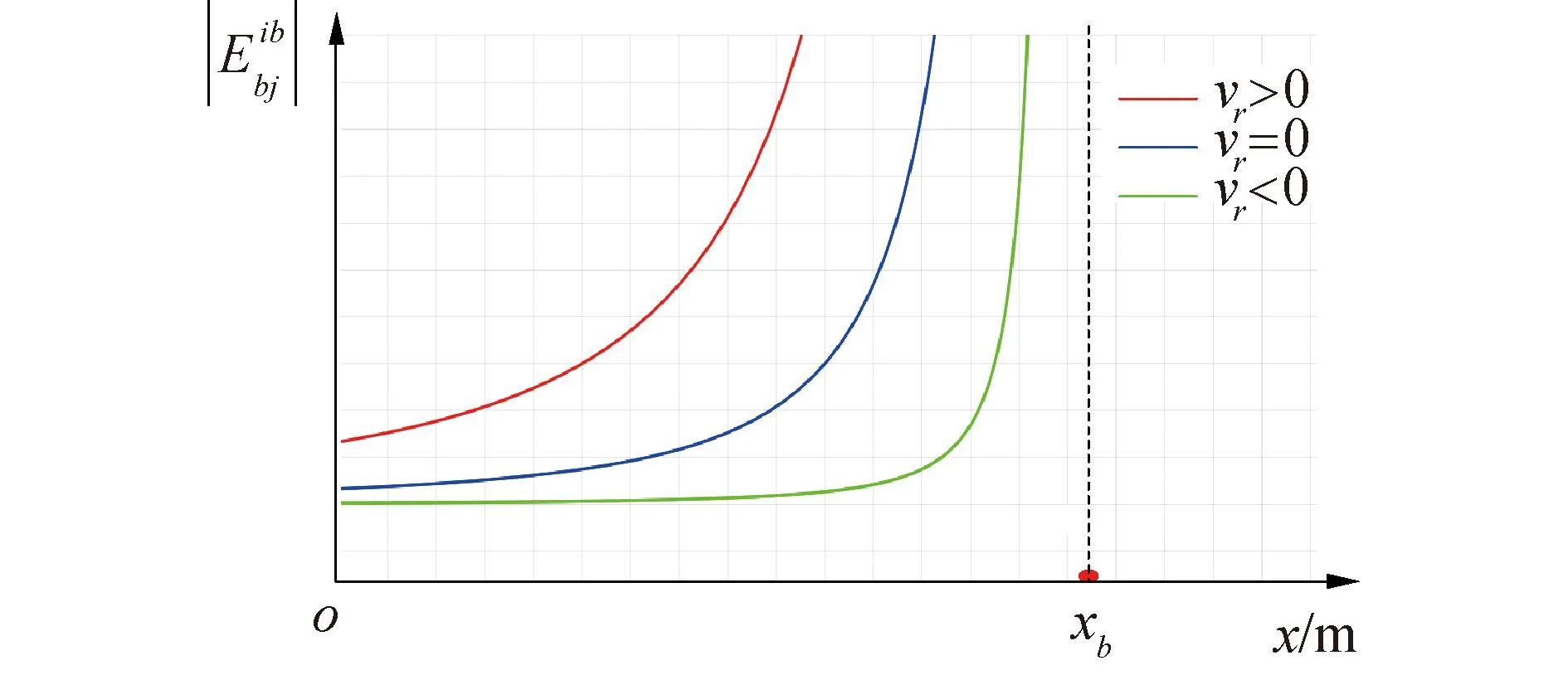
图2 破冰船风险场场强示意Fig.2 Sketch of the field strength of icebreaker risk field
1.1.2 船舶碰撞风险系数
(4)

1.1.3 跟驰船具有的破冰船风险场势能

(5)
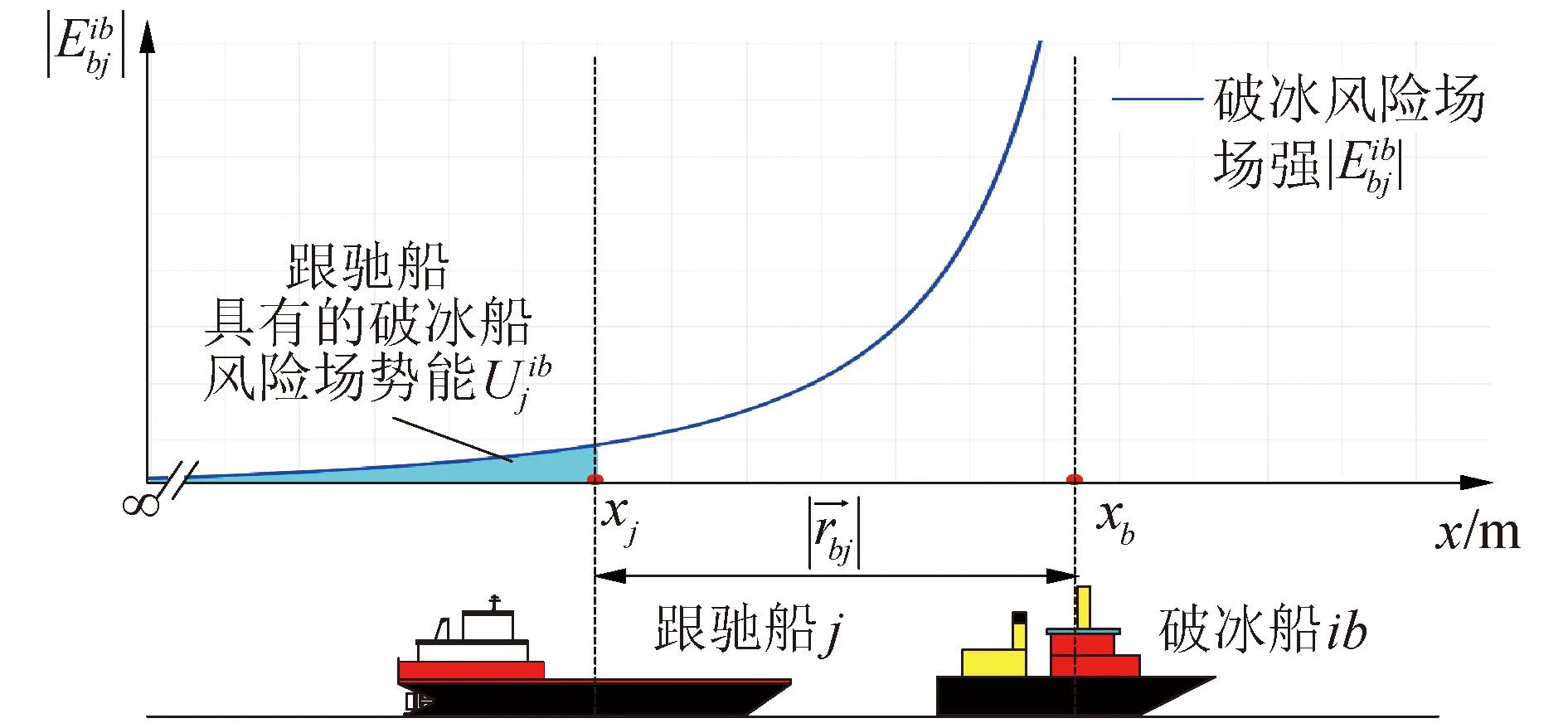
图3 破冰船风险场势能示意Fig.3 Sketch of the potential energy of icebreaker risk field
1.2 海冰风险场
1.2.1 航道内海冰运动特征
破冰船开辟航道后,航道边缘的海冰会在波流、海冰压力和风的联合作用下向航道中央涌入,最终导致航道关闭。如果跟驰船与破冰船间距过大,海冰会在跟驰船通过前再次堵塞航道,导致跟驰船被困住。根据北极航行指南(东北航道)[15]中有关破冰船护航下跟驰船冰困的描述以及北极海冰运动特征,假设破冰船驶过后,海冰从航道两侧向航道中央漂移,当海冰聚集到一定密集度时发生航道堵塞,跟驰船由于较大的冰阻力而无法继续前进,此时发生冰困事故。图4为航道内海冰运动示意图Uice0图中的阴影三角形区域即为t时刻内破冰船后航道中海冰的堆积情况,定义破冰船船艉在t=0时刻所在的位置为(x0,y0),当破冰船驶过后,航道边缘的海冰开始向航道内漂移,经过t时刻后(x0,y0)处的海冰横向漂移的距离dice为:
图4 冰航道内海冰运动示意Fig.4 Sketch of the sea ice motion in ice channel

(6)
船队直线航行时,破冰船开辟的航道宽度等于自身船宽。因此(x0,y0)处航道横截面的海冰密集度cx0可表示为:
(7)
t时刻内破冰船航行的距离dib为:

(8)
式中:vice为航道内海冰运动速度,m/s;Wib为破冰船船宽,即航道宽度,m;vib为破冰船航行速度,m/s。
1.2.2 海冰风险场场强
根据1.2.1节的分析构建海冰风险场来表征航道内海冰对跟驰船航行安全的影响。海冰风险场场强的大小主要由海冰密集度决定,海冰对跟驰船航行安全的影响表现为海冰密集度越大,跟驰船与之发生冰困事故的可能性越大,事故后果越严重。
如图4所示,将海冰风险场中心假设在点a(x0+0.5Lib,y0+0.5Wib)处来反映t时刻航道内海冰对周围船舶的冰困危险,海冰风险场模型如图5所示,表达式为:

图5 海冰风险场场强示意Fig.5 Sketch of the field strength of sea ice risk field
(9)
1.2.3 船舶冰困风险系数
(10)

1.2.4 跟驰船具有的海冰风险场势能
(11)

图6 海冰风险场势能示意Fig.6 Sketch of the potential energy of sea ice risk field
1.3 安全跟驰距离求解
1.3.1 最小安全跟驰距离


图7 最小安全跟驰距离示意Fig.7 Sketch of the minimum safety following distance
(12)
式中:dmin为破冰船与跟驰船的船头最小安全间距;Lib为破冰船船长;Lf为跟驰船船长。
1.3.2 最大安全跟驰距离


图8 最大安全跟驰距离示意Fig.8 Sketch of the maximum safety following distance
(13)

2 船舶冰区编队案例研究
为了验证模型的有效性,本文采用极地冰区船舶编队航行数据构建航行风险场,并通过航行风险场求解编队船舶之间的安全跟驰距离,最后将模型仿真结果与实际航行数据及已有跟驰模型进行对比验证。
2.1 破冰船护航下船舶航行风险场构建
本文采用2018年西行穿越北极东北航道的破冰船护航作业情景,以破冰船Vaygach和跟驰船Tian You为研究对象构建极地冰区船舶编队航行场景。破冰船Vaygach位于编队最前方以连续式破冰的作业方式向前航行,跟驰船Tian You在后方与破冰船之间保持一定距离航行。编队船舶基本情况见表1。
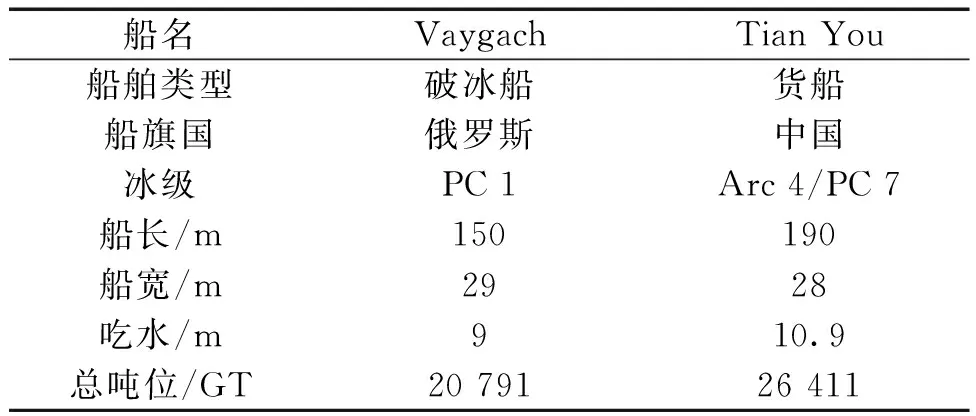
表1 编队船舶基本情况Table 1 Basic information of the convoy ships
2.1.1 船舶碰撞风险系数

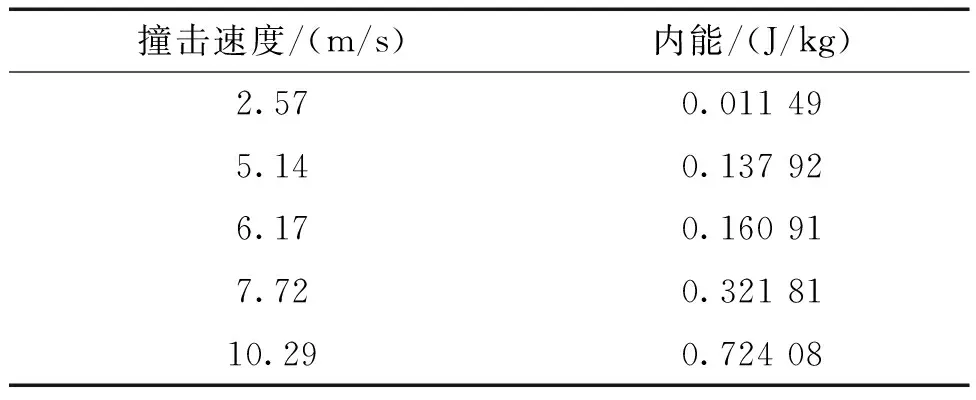
表2 不同速度对应的内能变化[16]Table 2 Internal energy for all proposed velocities [16]
IE=1.065 42×10-3v2.802 98+6.628 49×10-3
(14)
式中:IE为船舶单位质量产生的碰撞内能,J/kg;v为船舶的速度,m/s。将上述待定参数代入式(4)得破冰船Vaygach和跟驰船Tian You的碰撞风险系数表达式,式中系数见表3,随着速度的增加,船舶的碰撞风险系数也会增加,发生碰撞事故时造成的损失也越大。

表3 船舶碰撞风险系数参数Table 3 Parameters of ship collision risk coefficient
2.1.2 破冰船Vaygach风险场

(15)
式中:rbj=xj-xb为xb处破冰船Vaygach到xj处的向量;|rbj|为rbj的模。

(16)
式中|rbj|为xb处破冰船Vaygach与xj处跟驰船Tian You的距离。
为了对待定参数k1(>1)进行拟合,根据文献[18]提出的北极航行船舶航行跟驰模型得两船中心的最小距离表达式为:

(17)
式中:Sm为船舶安全余量可取1/4倍跟驰船船长,即0.25Lf;vf为跟驰船速度,m/s;tr为跟驰船发现破冰船航行态势变化到开始制动的反应时间,取70 s,将式(17)代入式(16)得到不同速度下最小跟驰距离对应的可接受碰撞风险势能值表达式:
(18)

2.1.3 船舶冰困风险系数
基于1.2.3节的分析,船舶冰困风险系数主要适用于跟驰船Tian You,其表达式为:
(19)
式中待定参数μ可通过海冰运动特征与船舶航行态势等条件拟合得到。
2.1.4 海冰风险场
根据1.2.2节的分析,待定参数λ2(>0)决定了不同海冰产生的风险场场强的相对大小,这里使λ2=1,k2(>1)决定了海冰产生风险场场强随距离的变化速率。李瑜洁等[19]、施骞等[20]基于国际北极浮标计划(IABP)浮冰冰速数据以及北极卫星遥感冰速产品数据对1979-2017年的北极海冰运动特征进行了分析,研究发现自20世纪90年代以来,北极地区海冰流速逐渐趋于稳定状态,2009-2016年北极海冰平均运动速度为5 cm/s,因此本文选用此速度作为航道内海冰的恒定运动速度。因此,根据式(9)可得到t时刻xa处海冰风险场场强表达式为:
(20)
式中:raj=xj-xa为xa处海冰风险场指向xj处的距离矢量;ca(t)=2vicet/Wib。

(21)
北极航行指南(东北航道)[15]指出拥有足够动力的冰区加强型船舶可以通过覆盖0.6~0.7的一年冰区域,因此本文假设当航道内海冰密集度达到0.8时,跟驰船无法继续前进发生冰困事故。根据式(7)可求出破冰船驶过后航道内海冰密集度达到0.8时所需要的时间t0=203 s,由t0可求的式(21)中参数d0:
(22)

2.1.5 安全跟驰距离计算
根据1.3节的分析,可得到破冰船Vaygach护航下Tian You船的安全跟驰距离(船头间距)表达式为:
(23)
(24)
加拿大北极冰域航行系统(arctic ice regime shipping system, AIRSS)[21]对北极海冰厚度、密集度、年龄与粗糙度进行了量化,并根据海冰情况和船舶的冰级信息提供了不同冰情下的船舶的最大安全航速。根据船舶最大安全航速与海冰乘数(sea ice multipliers)之间的关系,拟合得到不同冰情下Tian You的最大安全航速表达式:
vf_kn=-0.001c3-0.110 1c2+0.004 2c+14.868
(25)
式中:c为船队周围海冰密集度;vf_kn为Vaygach和Tian You的最大安全航速,kn。将不同冰情下的船队航速代入式(23)、(24)即可求出不同冰情下船队最大安全航速对应的安全跟驰距离区间,如图9所示。当海冰密集度较低时,不会对跟驰船航行产生障碍,本次编队航行中船舶之间的跟驰速度与间距由破冰船统一指挥,要求破冰船编队船舶之间保持0.4~0.6 nmile(740.8~1 111.2 m)间距,中度冰情(四五成冰)且编队视线良好的情况下航速控制在10~11 kn,因此本文假设船队周围海冰密集度大于等于0.5时,跟驰船才可能发生冰困事故,此时才会存在最大安全跟驰距离。

图9 冰情与安全航速、安全距离对应关系Fig.9 The relationship of ice condition and safe speed/distance
2.2 模型效果评价
2.2.1 最小安全跟驰距离验证
根据文献[18]中提出的北极航线船舶跟驰模型可计算本文构建的破冰船护航下船舶航行场景下的最小安全跟驰间距,通过已有模型结果与本模型结果进行比较,评价模型仿真效果。文献[18]中跟驰模型的最小安全船头间距表达式为:
(26)
式中:Sm为船舶安全余量可取1/4倍船长,即0.25Lf;t为跟驰船反映时间取70 s,两模型对比结果如图10所示,可以发现通过航行风险场模型求解出的Tian You船最小安全跟驰距离与已有模型吻合,可认为基于破冰船风险场模型求解最小安全跟驰距离过程可行。

图10 Tian You船最小安全跟驰距离对比Fig.10 The comparison of the minimum safety following distance for Tian You
2.2.2 最大安全距离验证
根据2018年Tian You航次记录,在中度冰情(四五成冰)且编队视线良好的引航过程中,编队之间最大船舶间距为0.6 n mile(1 111.2 m),且跟驰速度一般控制在10~11 kn[22]。根据本模型最大安全跟驰距离求解过程对Tian You船10~11 kn的最大跟驰距离进行求解得到最大跟驰距离分别为1 224.5 m和1 326.9 m(跟驰船船艉到破冰船船艉),这与实际航行中要求保持的最大跟驰距离接近(见图11),表明通过本模型仿真得到的最大安全跟驰距离基本符合实际船舶冰区航行要求。

图11 Tian You船最大安全跟驰距离对比Fig.11 The comparison of the maximum safety following distance for Tian You
2.2.3 模型讨论
本文提出破冰船护航下船舶航行风险场模型来描述船舶之间以及船舶与海冰之间的相互作用关系,求解不同冰情下船舶之间的安全距离,仿真结果验证了航行风险场模型的有效性。然而,本模型在构建过程中仍存在一些假设和简化,在一定程度上限制了模型的有效性。例如,在海冰风险场模型中只考虑了海冰密集度对船舶的影响,参考了指南中船舶可通航的最大海冰密集度情况对模型的临界海冰风险势能进行标定。同时,船舶在冰区的航行还会受到例如海冰厚度、海冰类型、大风等环境因素的影响,同时这些因素之间也存在复杂的相互作用关系。因此,在后续的研究中应进一步分析破冰船护航下船舶与冰区环境之间的相互作用关系,为本模型的构建提供理论基础。
3 结论
1)本文针对破冰船护航作业中跟驰船碰撞和冰困两大典型事故类型,基于人工势能场理论提出并构建破冰船护航下船舶航行风险场理论和模型,包括破冰船风险场模型和海冰风险场模型,对破冰船护航下的跟驰船碰撞和冰困事故风险进行量化。
2)基于风险场模型提出破冰船护航下的船舶安全跟驰距离求解方法,该方法可得出不同海冰密集度下船舶的最大和最小安全跟驰距离。
3)最后结合实际航行情景和现有跟驰模型对本文提出的模型进行实例分析和验证。结果表明基于航行风险场模型得出的编队船舶安全跟驰距离结果与现有跟驰模型和实际跟驰距离基本吻合,能够为破冰船护航下船舶安全跟驰研究提供理论指导。
进一步地,如何分析破冰船护航下船舶与冰区环境之间的相互作用关系是后续研究工作中的重点内容。
猜你喜欢
军事文摘(2023年5期)2023-03-27
海洋通报(2021年3期)2021-08-14
小学科学(学生版)(2021年2期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
动漫星空(兴趣百科)(2019年5期)2019-05-11
航空世界(2018年12期)2018-07-16
北京航空航天大学学报(2017年3期)2017-11-23
电子技术与软件工程(2016年24期)2017-02-23
海军航空大学学报(2015年4期)2015-02-27
河北遥感(2014年4期)2014-07-10