船舶动力定位非线性模型预测控制
2024-01-15 05:56张泉郭晨
哈尔滨工程大学学报 2024年1期
张泉, 郭晨
(大连海事大学 船舶电气工程学院,辽宁 大连 116026)
动力定位(dynamic positioning, DP)是指船舶不借助锚泊而单独利用其自身安装的推进器,实现船位、航向或预设航迹的自动保持。DP是船舶进行海洋资源开发时利用的重要技术手段,因此DP控制系统的设计一直备受关注,诸多控制算法被应用在DP控制系统的设计中,如反步法控制[1]、动态面控制[2]、滑模控制[3-4]、自抗扰控制[5-6]、鲁棒控制[7-8]、智能控制[9-10]等。但这些控制器在设计阶段大多忽略了2个问题:1)船舶推进系统存在推力饱和以及推力变化率饱和约束,无法提供任意大小的推力及力矩;2)船舶进行DP作业时极有可能要求船舶保持低速航行,即对船舶运动状态进行约束。一旦忽略了上述问题,控制效果将难以达到预期,甚至可能无法保证闭环系统的稳定性,最终导致船舶控制失效。
模型预测控制(model predictive control, MPC)由于可以显式处理约束条件、优化控制作用而备受人们关注。在DP领域中,挪威厂商Konsberg首次在DP系统中应用了MPC算法[11]。同年,文献[12]利用精确反馈线性化方法将移动式海上平台动力定位数学模型中的非线性问题和已知扰动做线性化处理,并结合线性MPC控制算法对平台进行控制。文献[13]提出了一种基于拉盖尔函数的线性MPC算法,该算法可提高DP控制系统的实时性。相比于线性MPC控制器,非线性MPC控制器(nonlinear model predictive control, NMPC)能够更好地处理非线性系统,控制效果更佳。文献[14]针对DP作业的非线性阶段和线性阶段分别设计了NMPC控制器和MPC控制器,并设计了切换函数实现不同作业阶段的控制器切换。上述工作对MPC在DP领域的应用做出了较深入的研究,但在保证系统稳定性方面鲜有讨论,仍需要进一步研究。文献[15]中已经指出,选择合适的终端要素可以确保系统稳定性,但构造终端要素目前尚未有统一的方法。基于上述分析,本文针对DP控制问题,提出了一种NMPC控制方法。引入多面体描述系统和线性矩阵不等式(linear matrix inequalities, LMI)理论设计NMPC控制器中的预测模型和终端要素,通过性能指标递减法理论证明了闭环系统的稳定性。
1 船舶运动数学模型
船舶在动力定位时船速较低,为方便问题研究,此时可认为船舶所受阻尼是线性的,所受的科里奥利向心力近似为0。假设船舶关于艏艉线左右对称,则在不计风、浪、流等环境影响下,只考虑三自由度运动的船舶动力定位数学模型可表示为[11]:
(1)

(2)
(3)
(4)

2 船舶动力定位NMPC控制器设计
2.1 模型预测控制原理
考虑非线性系统:
x(k+1)=f(x(k),u(k))
(5)
式中:x(k)为k时刻状态变量;u(k)为k时刻输入变量;f(·)为非线性函数且f(0,0)=0。在k时刻从系统状态x(k)出发的MPC问题可以表示为:
(6)

条件A1终端约束集Ω是状态约束空间的子集,并且是一个包含原点的闭集;
条件A2对于所有的x∈Ω,终端控制律uF(x)均满足输入约束,并且当x=0时,uF(x)=0;
条件A3当x∈Ω时,uF(x)能控制系统状态轨迹一直保持在终端约束集中;

2.2 控制目标和NMPC控制器设计
(7)

在考虑控制目标、状态和输入约束以及确保系统稳定性的情况下,MPC性能指标函数设计为:
(8)

3 NMPC算法稳定性分析

3.1 船舶多面体描述系统
多面体描述系统广泛用于描述存在不确定性的非线性系统,它是由一系列线性系统构成的集合,且该集合能够包裹原非线性系统。将式(7)在平衡点ξ=0附近线性化,其Jacobian矩阵
Jacobian矩阵中的a13、a23、a14、a24、a15、a25会随着系统状态的变化而变化,表达式为:
(9)
而Jacobian矩阵中的其余元素均为常数,受篇幅限制不再逐个列出。
对式(7)建立多面体描述系统时,可根据上述参数的最大值和最小值来确定多面体的顶点。式(7)的多面体描述集合Π定义为:

(10)

(11)

(12)

3.2 终端要素的设计方法
定理1[17]对于式(11)所示的多面体描述系统,如果存在正定对称矩阵X∈R6×6和矩阵Y∈R3×6,对所有的i=(1,2,…,q)满足矩阵不等式:
(13)

(14)
根据Schur补性质可知,式(14)等价于矩阵不等式:
(15)
将式(15)分别左乘PT和右乘P,可得:
Q-HTRH=S≥0
(16)

(17)
(18)
式中:τ*(k+i|k)表示在k时刻预测系统在未来k+i时刻的最优控制作用;ξ*(k+i+1|k)表示与τ*(k+i|k)相对应的最优系统状态。式(17)与式(18)相减可得:
(19)

(20)

定理2对于式(11)所示的多面体描述系统,如果存在正定对称矩阵X∈R6×6和矩阵Y∈R3×6,满足下述矩阵不等式:
(21)
(22)

定理2的证明详见文献[17],本文不再赘述。综上可知,只要求解出符合定理1~2的矩阵X和Y,就可以确定终端惩罚项的权重矩阵P和终端控制律中的反馈矩阵H。

(23)
s.t.α>0,X0=αX,Y0=αY
文献[19]指出当X0为正定矩阵时,log det(X0)是凸函数。因此,可利用凸优化求解器和LMI工具箱对式(23)进行求解,得到α、X和Y,进而确定3个终端要素的具体表达形式。
4 数字仿真算例及结果分析
为验证设计的船舶动力定位NMPC控制器的性能,对一艘供给船(船长76.2 m,满载排水量4 591 t)在Matlab环境下进行仿真。该船的水动力参数详见文献[20]。
NMPC控制器参数设置如下:预测时域N=50,采样时间h=0.5 s,权重矩阵Q=diag{5×109,1×1010,5×1012,1,1,1},权重矩阵R=diag{1,1,0.001}。利用YALMIP工具箱离线求解式(23)可得α=2.02×1020,P=diag{5×108,1×1010,5.1×1012, 9×1019,2×1020,6.6×1023}。
图1~2是船舶不受外界扰动时的位置状态和速度状态时间响应曲线。总体来看,本文设计的NMPC控制器能够控制船舶以较快的速度到达期望位置并稳定在期望状态上,稳定时间大约为140 s,这表明了系统的稳定性。此外,从图1中还可以看出航向ψ快速稳定在参考值上且没有超调,稳定时间约为40 s。这是因为船舶在实际进行动力定位时,一般都会优先稳定住航向后再控制船舶的其他状态,故本文将航向ψ的权重设置的较大。图3是船舶推力与力矩的响应曲线,从图中可以看出推力及力矩的大小未超出设定范围,并且在控制期间内推力及力矩变化平缓,符合海洋工程实践需求。

图1 无外界扰动时船舶位置和航向响应曲线Fig.1 Position and course curves with no disturbance

图2 无外界扰动时船舶速度状态u、v、r响应曲线Fig.2 u, v, r curves with no disturbance

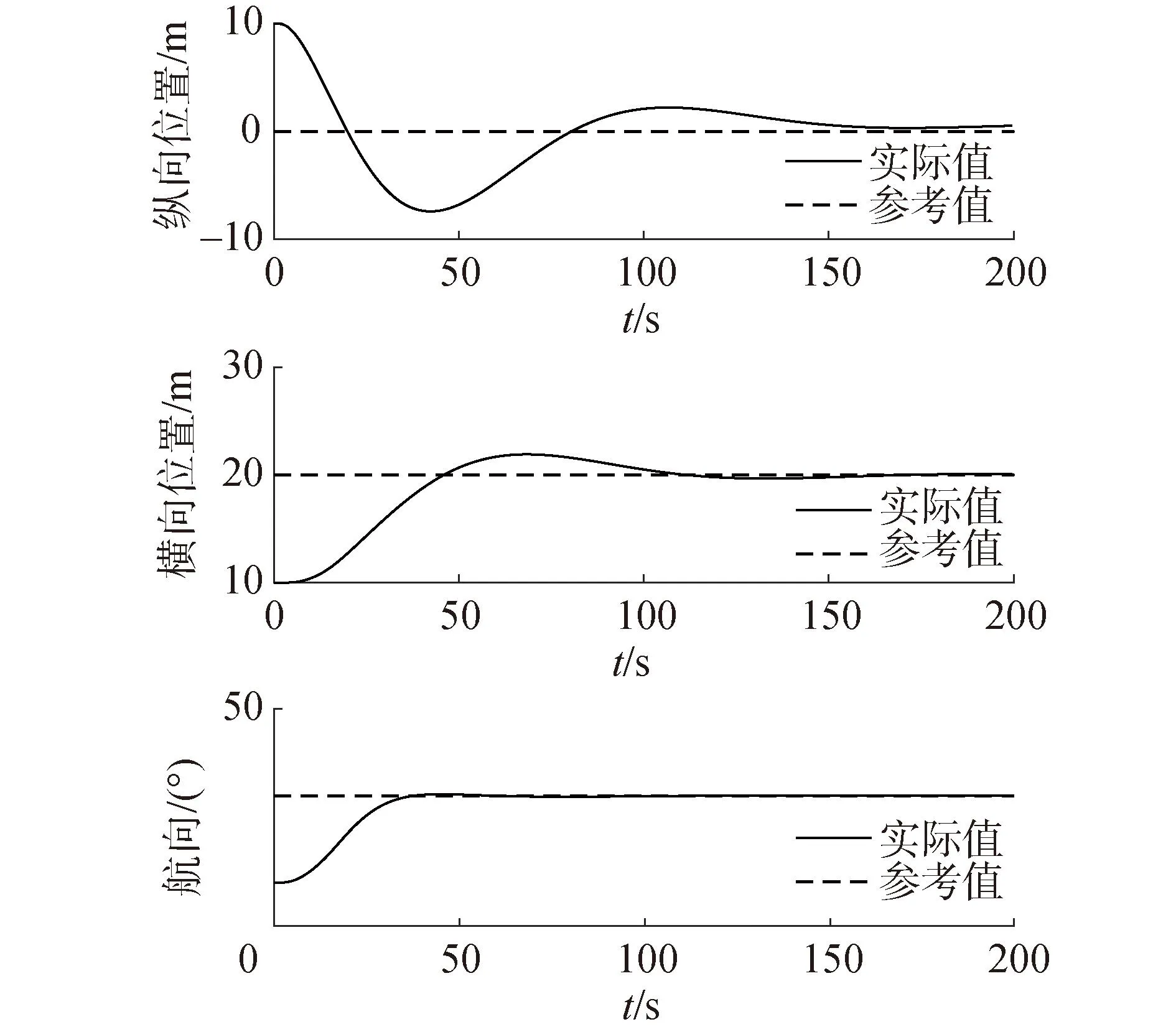
图4 有扰动下船舶位置和航向响应曲线Fig.4 Position and course curves with disturbances

图5 有扰动下船舶速度状态u、v、r响应曲线Fig.5 u, v, r curves with disturbances
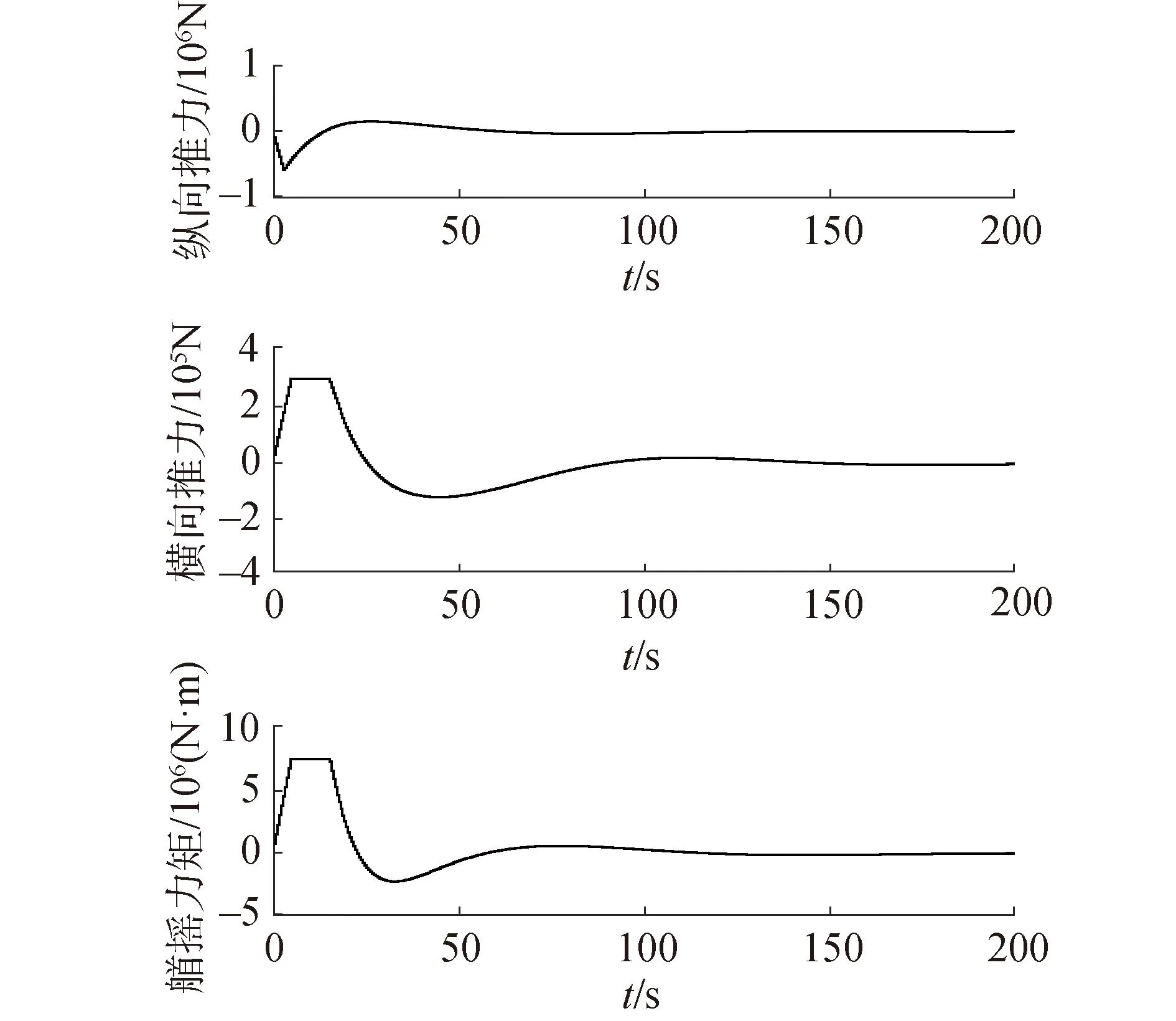
图6 有扰动下船舶推力及力矩响应曲线Fig.6 Control input curves with disturbances
5 结论
1)本文提出的NMPC方法能够在较短时间范围内将船舶准确地控制在期望状态上,同时满足实际作业中对船舶运动状态和推力的限制要求;
2)在动力定位过程中存在干扰时,本文提出的控制器亦能表现出良好的控制性能,具备本质鲁棒性。
本文建立多面体描述系统时顶点矩阵较多,这导致求解LMI矩阵时计算量较大,有时甚至无法求出合适的解。后续将研究如何简化LMI矩阵的求解问题。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学大王·低年级(2022年3期)2022-03-17
课外生活·趣知识(2021年8期)2021-08-24
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
数学物理学报(2019年4期)2019-10-10
东华大学学报(自然科学版)(2018年1期)2018-06-29
电子制作(2016年15期)2017-01-15
贵州师范学院学报(2016年3期)2016-12-01
金色年华(2016年11期)2016-02-28