不同海况条件下舰载无人机着舰安全分析
2024-01-15 05:57张子军张山王衍洋
哈尔滨工程大学学报 2024年1期
张子军, 张山, 王衍洋,3
(1.中国航空工业集团公司 沈阳飞机设计研究所, 辽宁 沈阳 110035; 2.北京航空航天大学 航空科学与工程学院, 北京 100083; 3.北京航空航天大学 江西研究院, 江西 南昌 330096)
舰载机是航母战斗力的主要来源,随着技术的发展和现代战争任务的需要,无人机上舰成为未来海军发展的必然趋势。1991年“先锋”舰载无人机成功用于海湾战争中,帮助美海军掌握战场主动权,在战争中大放异彩[1]。随着雷达探测技术的发展,隐身性能成为无人机设计中的重要指标,飞翼布局的舰载机隐身性能好、气动效率高的优点成为当前各国研究的重点和难点[2]。2013年7月10日X-47B舰载无人机于“布什”号航母上成功进行了海上阻拦着舰试验,虽然后续X-47B无人机的研发被腰斩,但其为美海军MQ-25黄貂鱼舰载无人机的研制以及世界舰载无人机的发展起到了极大的推动和借鉴作用,不难预测,飞翼无人机必将成为舰载无人机的发展趋势[3]。
相比有人舰载机,无人舰载机在操纵过程中虽然可以不受驾驶员的情绪影响,但同样需要解决有人舰载机遇到的问题,而且由于缺少了驾驶员的主动操纵,实际着舰时可能面对各种突发的情况[1]。经过多年的研究,飞翼无人机着舰控制技术取得了一些成果[4]。在控制系统设计方面,模型预测控制[5]、非线性动态逆控制[6-7]、自适应控制[8]、最优预见控制[9]、总能量控制[10]、积分滑模控制[11]、反演控制[12]等多种控制方法以及强化学习等智能控制算法[13]被用于无人机的着舰控制系统设计中。
目前,各国对飞翼舰载无人机的研究还处在技术验证阶段,研究大多只是针对引导系统进行仿真研究,或对控制系统进行单独设计,缺少对无人机着舰安全方面系统性的研究[14]。为满足舰载无人机实际上舰需要,本文针对无人机安全着舰问题研究的需要,建立了机-舰-环境-控制闭环综合仿真系统,定量研究不同海况下舰载无人机着舰安全变化趋势,并给出相应着舰建议,为舰载机着舰决策提供参考。
1 机-舰-环境综合模型
1.1 舰载无人机模型
美国空军研究实验室为了实现未来舰载无人加油机的协同开发,研发出了一款飞翼无人舰载机的等效模型“Equivalent Model Ⅱ (EQⅡ)”,该模型融合了ICE、X-45C和X-47B无人机的外形特点,具有飞翼飞机的典型操稳特性,以该等效模型为基础,进行飞行动力学和运动学建模,该飞机的基本结构数据如表1所示[15-16]。

表1 EQⅡ飞机基本参数Table 1 Basic data of EQ Ⅱ aircraft
飞机的操纵结构如图1,其共有3组操纵舵面,由外向内分别为:阻力方向舵、外升降副翼、内升降副翼,在纵向着舰的研究中,主要操纵舵面为内升降副翼。
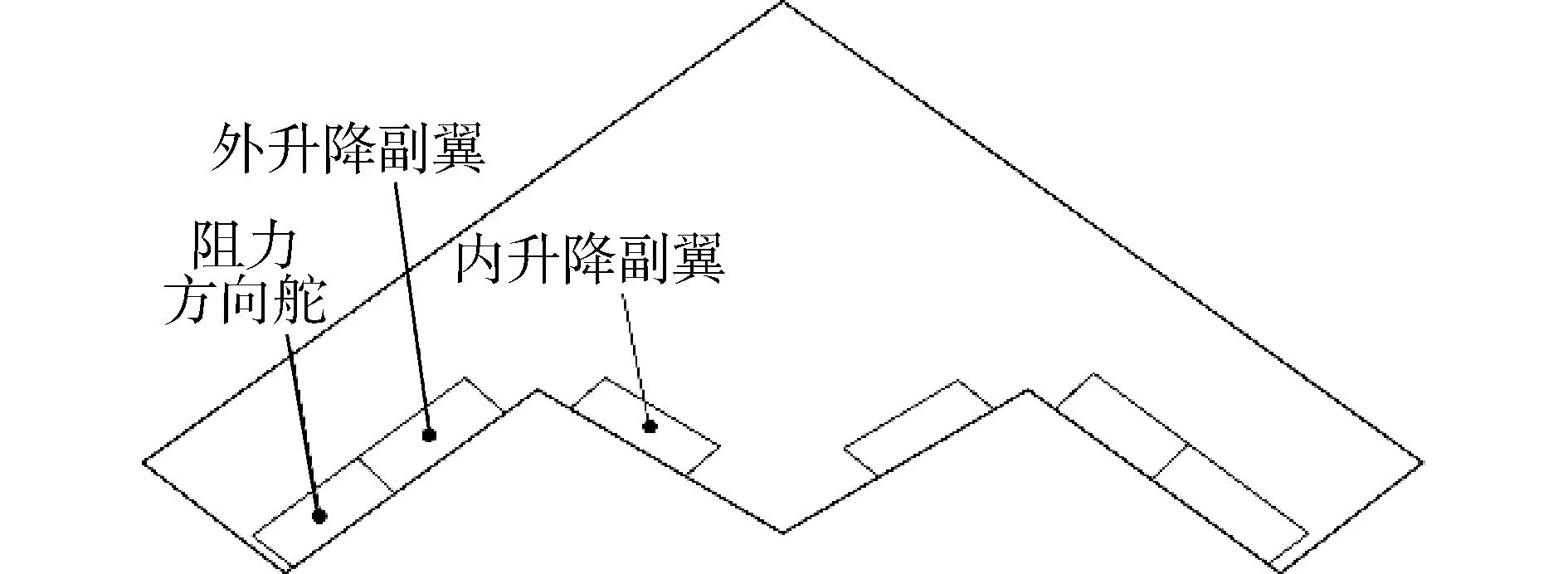
图1 算例飞机结构Fig.1 Example aircraft structure
按照飞行力学基本原理,以航迹角γ=-3°的定常下滑为基准状态,建立该舰载无人机的纵向小扰动线化模型,代入飞机参数可得状态空间矩阵:

1.2 基于Conolly线性理论的甲板运动模型
目前对航母甲板运动建模多采用基于大量海上实验观测拟合形成的正弦波法或功率谱法。其可以表征航母在某一特定海况下的甲板运动特性,但是一旦工况改变,运动模型将不再适用。为了讨论不同因素(航速、航向、海况)对甲板运动的影响,本文采用Conolly线性理论建立通用甲板运动模型,其对于大型舰船低幅值运动具有较高的精度。
基于Conolly线性理论舰船横摇运动的传递函数[17]:
式中:φ为舰船的横摇角;ΔJφ为横摇的附加转动惯量;D为舰船的排水量;hφ为横稳心高度;ωφ为舰船横摇运动固有频率;ζφ为横摇阻尼因子。
纵摇运动的传递函数:
式中:θ为舰船的纵摇角;ωθ为纵摇固有频率;ζθ为纵摇阻尼因子;ΔJθ为纵摇的附加转动惯量;hθ为纵稳心高度。
垂荡运动的传递函数:
式中:z为垂荡运动位移;ωz为垂荡固有频率;ζz为垂荡阻尼因子;λz为垂荡运动附加质量;Sw为水线面面积。
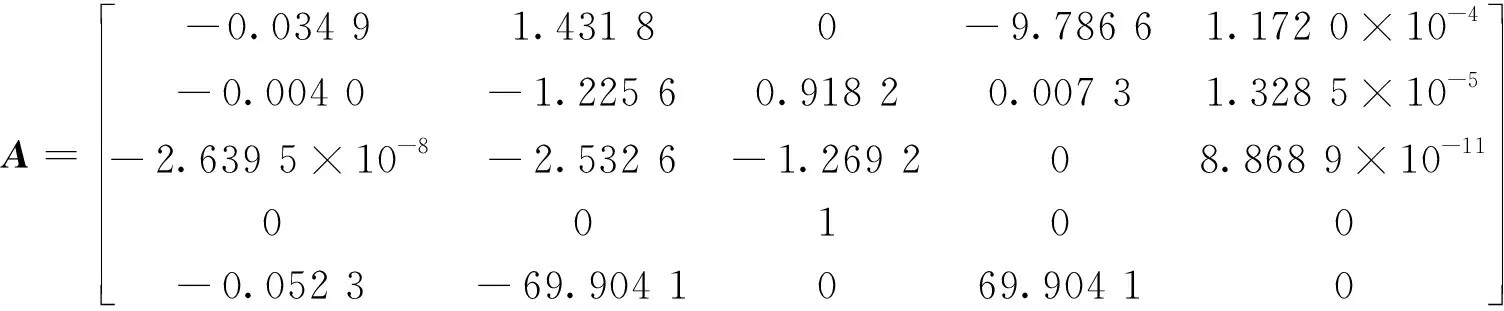
以尼米兹级重型航母为例,航母在航速Vship,遭遇角β=45°时,分别于3级海况和5级海况下进行仿真,结果如图2。
图2 基于Conolly理论的甲板运动仿真结果Fig.2 Simulation results of deck motion based on Conolly
1.3 舰尾流工程化模型
航母的几何外形极不规则,造成的舰艉流场也很复杂,很难建立简单可靠的数学模型。为研究舰艉流对舰载机着舰的影响,对舰艉流的建模有CFD法、数据库法和工程化方法等。目前实际应用中效果较好、运用较多的是美军标MIL-STD-1797A中规定的工程化建模方法。
在美军标MIL-STD-1797A中,舰艉气流扰动包括4部分[18-19]:自由大气紊流分量(u1,v1,w1)、稳态扰动分量(u2,v2,w2)、周期性扰动分量(u3,v3,w3)和随机扰动分量(u4,v4,w4),计算表达式为:
uw=u1+u2+u4
vw=v1+v4
ww=w1+w2+w3+w4
式中:u、v、w别为舰艉流在航母坐标系x、y、z方向上的分量,在研究舰载机纵向着舰时,只需对舰艉流x、z方向上的分量进行建模。
按照美军标中舰艉流的建模方法,建立舰艉流综合模型,5级海况下,舰载机进近速度取70 m/s,甲板风速Vwod=10.29 m/s(即20 kn),舰艉流仿真结果如图3。

图3 舰艉流综合仿真结果Fig.3 simulation results of carrier air wake
2 全自动着舰控制系统
无人舰载机不同于有人舰载机,整个着舰过程需要依靠全自动着舰系统(ACLS)自主完成。ACLS中的控制器可分为2类,1)自动飞控系统(AFCS),2)自动着舰的航迹引导系统。舰载无人机的全自动着舰引导控制系统结构如图4所示。

图4 ACLS系统结构示意Fig.4 ACLS system structure
2.1 内环增稳器
优秀的内环品质能使控制系统更好地发挥作用,为了使算例飞机达到飞行品质要求,需要设计增稳系统,通过反馈迎角α和俯仰角速率q来改善飞机的短周期模态特性,其结构如图5所示。

图5 增稳系统结构Fig.5 Structure of stabilizing controller
采用极点配置法对反馈增益Kα和Kq进行求解,选择目标阻尼比0.707,短周期频率3 rad/s,因此需要配置的目标极点为-2.121 0±2.121 6 i,求得对应的反馈增益Kα=-3.711 4,Kq=-1.500 2。
2.2 二阶指令滤波
在飞行控制中,由于舵面偏转的速率和幅值限制,指令信号会出现输入饱和,在建模过程中需建立二阶非线性指令滤波器,对指令信号加以大小、速率和带宽的限制来生成平滑的指令信号[20]。
二阶非线性指令滤波器的结构如图6所示,其状态空间方程可表示为:
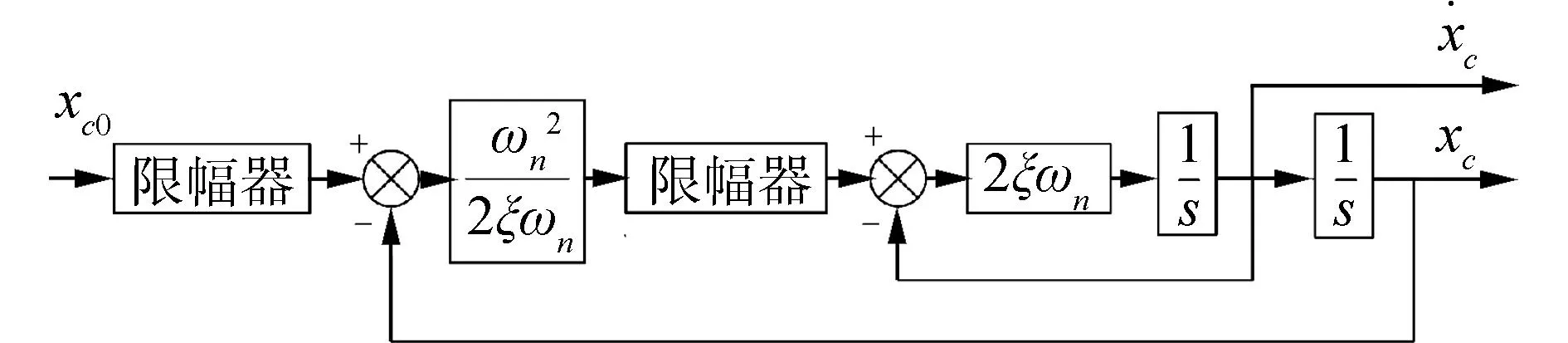
图6 二阶非线性指令滤波器结构Fig.6 Second order nonlinear instruction filter structure
式中SM(·)和SR(·)分别代表幅值限制和速率限制。
2.3 自动驾驶仪
自动驾驶仪的功能是将飞机控制在指令姿态[21],其结构如图7所示。其工作原理是通过控制内升降副翼偏角,减小指令信号与反馈的飞机状态量的偏差,最终实现对飞机姿态的控制。

图7 自动驾驶仪结构Fig.7 Autopilot structure
采用PID控制器(比例-积分-微分控制器)进行飞机姿态控制,PID控制器的传递函数为:
搭建控制器模型,输入指令姿态角,根据飞机的响应曲线,调整相应的PID参数,使其满足调节时间小于5 s,超调量不大于5%的时域准则要求。
2.4 进近动力补偿系统
舰载着舰时处于低动压状态,航迹角与速度的强烈耦合导致飞机处于不可控状态,因此需加入进近动力补偿系统(APCS),改善飞机低动压状态下的操纵性能。进近动力补偿的方法主要有保持速度V恒定和保持迎角a恒定2种方式,由于保持速度V恒定的动力补偿系统存在跟踪静差,目前大多采用的是保持迎角a恒定的方法,同时可以证明,保持迎角a恒定的动力补偿系统兼具保持速度V恒定的功能[22]。迎角a恒定APCS的结构如图8所示。

图8 迎角恒定的APCS结构Fig.8 APCS structure with constant angle of attack
其控制律可表示为:
式中:Tα为补偿器时间常数;Kα、Kαi分别为迎角PI控制器的比例系数和积分系数;τ为清洗网络的时间常数;Kδ、Kn分别为内升降副翼和法向过载的反馈系数。
2.5 引导控制律
着舰过程中,引导控制器需要根据离舰距离L(t)自动计算出当前位置对应的理想高度,并与实际高度比较,生成高度指令信号Hc作为高度控制器的输入,引导飞机减小与理想下滑轨迹的高度偏差。
在理想状态下,舰载无人机相对母舰的水平速度为V0cosγ-Vship,则舰载无人机对舰下滑道斜率为tan(V0sinγ-Vship)),因此,在离舰距离L(t)处,对应的理想高度H0为:
H0=L(t)×tan(V0sinγ/(V0cosγ-Vship))
相应的高度指令信号Hc为:
Hc=H0-H+HDMC
式中:H为实际高度;HDMC为甲板运动补偿高度。
3 不同海况条件下着舰安全分析
3.1 着舰性能指标
航母甲板运动模型得到的是航母“摇荡”中心(航母重心)的纵摇角、横摇角和垂荡高度,需要根据甲板几何尺寸转化为理想着舰点的位置变化。本文以CVN-68号尼米兹级航母为基础,建立甲板几何模型,航母甲板的几何尺寸以及航母重心、理想着舰点和拦阻索的位置关系如图9所示。

图9 CVN-68号航母甲板几何尺寸示意Fig.9 Geometric size of CVN-68 aircraft carrier deck
航母甲板共有4道拦阻索,相邻拦阻索间距为12 m,理想着舰点位于第2道拦阻索与第3道拦阻索中间。根据美海军自动着舰系统指导手册,结合其他相关文献,舰载机着舰安全条件整理为[23-25]:
1)着舰点纵向偏差:其范围为理想值-6 m~6 m,允许值-12 m~12 m;
2)最大下沉速度:受舰载机起落架强度限制,触舰时冲击载荷不能过大,最大下沉速度限制为4~5 m/s;
3)净空安全高度:为保障母舰与舰载机的安全,在舰载机飞至母舰舰艉时,要求飞机与甲板之间至少有3~3.66 m的净空安全高度,且超过6 m时应执行逃逸复飞;
4)下滑航迹偏差:舰载机在沿下滑道进近的过程中会受到舰艉流的扰动,造成舰载机偏离理想下滑轨迹,根据文献[25]中提出的评价指标,采用“理想值”和“允许值”2级指标,理想值小于2 m,允许值小于4 m;
5)着舰成功率:美海军自动着舰系统指导手册中对着舰成功率的要求为:“理想值”应大于80%,“允许值”为65%~85%。
3.2 舰载机着舰过程仿真
基于建立的机-舰环境综合模型和全自动着舰控制系统,设定海况等级5级,舰船航速10 kn,舰船遭遇角45°,在进舰前12.5 s接入甲板运动补偿指令,舰载机进近着舰轨迹如图10和图11所示。

图10 舰载机对理想下滑轨迹跟踪情况Fig.10 Tracking of target glide trajectory for UAV

图11 舰载机着舰点位置放大图Fig.11 Enlarged view of landing point of UAV
甲板运动补偿系统在离舰距离约900 m时开始工作,在着舰前舰载机能准确跟踪着舰点的高度变化,从图11中可以看出,舰载机下滑航迹始终位于理想边界内,着舰点位于理想着舰点之前约8 m,在允许范围内。
由于航母甲板运动和舰艉流扰动的随机性,即使在相同条件下每次着舰仿真的结果也不尽相同,图12是相同条件下仿真1 000次的着舰点散布图,其中成功着舰671次,失败329次,着舰成功率67.1%。

图12 仿真1 000次着舰偏差散布Fig.12 Dispersion chart of simulated 1 000 landing errors
3.3 不同海况条件下安全着舰范围
3.3.1 5级海况下的着舰限制范围
舰载机在进近着舰时为了缩短着舰距离,一般采用“逆风着舰”的方式。在进行甲板着舰作业时,航母要根据海上风向,适时调整舰船的行驶速度和角度,以满足甲板风的要求,因此舰船状态仿真范围选择如表2 所示。

表2 仿真船速和遭遇角范围Table 2 Range of ship speed and angle of encounter
以5级海况为例,取仿真1 000次结果计算着舰成功率,所得结果如图13所示。

图13 5级海况下舰载无人机着舰仿真结果Fig.13 Landing simulation results of carrier based UAV under level 5 sea condition
图中,根据海况风浪对照表,5级海况属于高浪级别的较高海况,海面伴有6级强风,平均波高2.1~3.0 m。从图13中着舰安全仿真结果可以看出,在该海况条件下,为最大程度上提高着舰成功率,航母航行速度应大于13 kn,这是因为航母的航速增加,舰载无人机相对母舰的速度越小,更有利于航迹控制,并且在相同海况和遭遇角下,航速越快,舰船的横摇、纵摇和沉浮运动越弱[17],理想着舰点高度变化幅值更小,着舰精度较高。
但与此同时,如图14所示,随着航母行驶速度的提高,舰艉流扰动更加强烈,不利于着舰控制,因此在图中当速度超过20 kn后,着舰成功率反而开始下降。综合考虑各因素对着舰安全的影响,5级海况下,最佳着舰的航速限制范围为13 kn≤Vship≤20 kn。
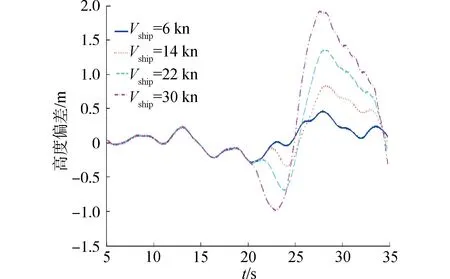
图14 不同航速下舰艉流对着舰过程的扰动效果Fig.14 Effect of airwake disturbance on carrier landing at different speeds
3.3.2 不同海况下的着舰限制范围
分别取1~9级海况,船速和遭遇角仿真范围参照表2,所得结果如图15所示。
1级海况时,全航速均满足“理想值”着舰成功率大于80%的要求。
2级海况时,虽然全航速均满足“理想值”着舰成功率要求,但相较于 1 级海况,着舰成功率显著降低,建议着舰作业航速取8 kn≤Vship≤26 kn,能达到85%以上着舰成功率。
3级海况时,在航速Vship≤20 kn时能满足着舰成功率大于80%的要求,但在航速小于10 kn着舰成功率较低。
随着海况等级的提高,安全航速范围逐渐减小,当海况达到6级及以上时全航速均不满足安全着舰要求,不建议进行着舰作业。
综上,根据图15中仿真结果可整理得到不同海况下舰载无人机的安全着舰范围,如表3所示,需要说明的是受模型限制,本文只研究舰载无人机进近和着舰过程的安全,在实际着舰作业尤其是高海况作业时,需要综合考虑人员安全、设备工作条件等限制。
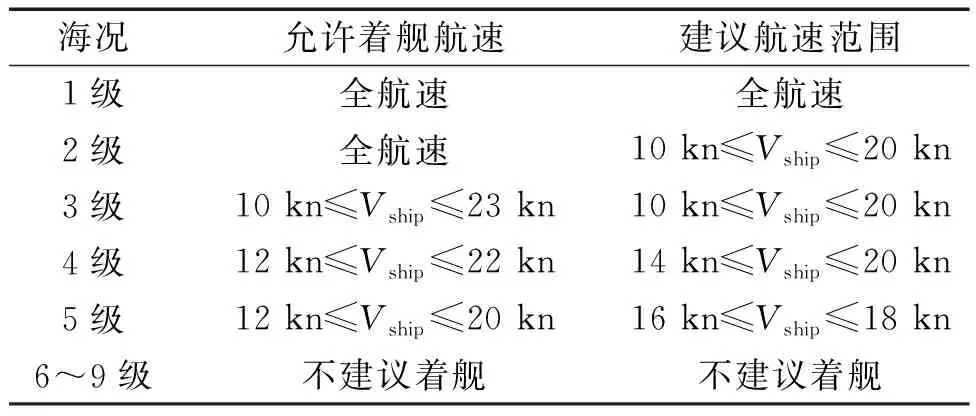
表3 不同海况下舰载无人机安全着舰范围Table 3 Safe landing range of carrier based UAV under different sea conditions
4 结论
1) 采用Conolly线性理论建立的甲板运动模型能够给出甲板运动与海况的关联参数,方便进行不同海况条件舰载无人机着舰仿真计算,模型精度较高;
2)在高海况条件下,航母可通过适当加快航速以提高着舰成功率,但高航速会加剧舰艉流扰动,不利于飞机着舰,在着舰时应综合考虑甲板运动与舰艉流的影响以确定航母运动状态。本文给出的不同海况下舰载无人机的安全着舰范围,为无人机着舰决策提供了参考;
3)后续可以开展无人机着舰横侧向控制律设计研究,扩大航母遭遇角的研究范围。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
水上消防(2022年1期)2022-06-16
装备制造技术(2020年3期)2020-12-25
船舶标准化工程师(2020年1期)2020-06-12
舰船科学技术(2018年7期)2018-07-25
国防(2017年12期)2017-04-09
反射疗法与康复医学(2017年7期)2017-01-16
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
应用海洋学学报(2015年3期)2015-11-22