基于各项异性多项式分布的风力机三维尾流模型
2024-01-15 05:56凌子焱赵振宙刘惠文马远卓刘一格王丁丁
哈尔滨工程大学学报 2024年1期
凌子焱, 赵振宙, 刘惠文, 马远卓, 刘一格, 王丁丁
(河海大学 能源与电气学院, 江苏 南京 211100)
尾流降低下游风力机效率和结构疲劳寿命,影响整个风电场的发电量[1-2]。随着计算机技术的发展,计算流体动力学(computational fluid dynamics,CFD)方法逐渐成为研究尾流的一种重要手段[3-4]。但是,CFD计算量大,耗时长,对计算机硬件要求高,很难满足工程领域计算快、实施便利等要求。尾流经验模型计算简单,具有一定的精度,广泛用于风力机布局优化[5]和发电量预测[6]等。欲准确预测尾流,需关注3个方面问题:1)尾流速度径向分布形状的假设;2)尾流扩展的表示;3)入流风速的建模[7]。
针对问题1,Jensen[8]和Frandsen[9]等认为尾流速度呈顶帽状分布,分别建立了Jensen尾流模型和Frandsen尾流模型。然而,研究表明,尾流速度在径向呈高斯或多项式分布,顶帽形状的假设产生较大误差[10-11]。为此,许多学者[11-17]采用高斯分布假设来建立尾流模型。与Jensen和Frandsen模型相比,高斯尾流模型精度更高[11-17],但尾流边界rw与高斯标准偏差σ间的关系难以确定。高斯尾流模型的尾流边界为c倍高斯标准偏差,c是经验常数,其选值显著影响尾流的预测精度,Bastankhah[11]、Gao[12]、Ishihara[13]、Ge[14]等分别取c值为1、2.58、1.18、2。Sun[17]根据不同入流情况和风力机参数对c赋不同的值,增加了工作的计算量。采用多项式形状描述速度亏损,可避免上述问题,因为多项式不涉及σ,其尾流边界是风速恢复入流风速的边界,物理上更加直观。因此,多项式分布比高斯分布更适合尾流模型的建模。
早期尾流模型中尾流边界扩展率k是固定值,仅与入流环境湍流强度有关[8-9]。Bastankhah[11]、Frandsen等[18]指出,k值的计算还应考虑风力机旋转产生的附加湍流强度。Tian等[19]、Gao等[12]相继提出了附加湍流强度的经验算法修正k值以改进尾流模型。上述模型均假设尾流速度服从轴对称分布,即同一尾流截面内各维尾流边界扩展率相同。Xie[20]、Abkar[21]揭示了尾流速度分布的非轴对称性质,指出同一截面内横向的尾流边界扩展率大于垂向。基于上述理论,Gao等[22]提出尾流模型在横向和垂向采用不同的湍流强度,以反映尾流的各向异性膨胀,然而这2个湍流强度不易获得。为了提高尾流预测的效率及精度,应提出更简单通用的各维尾流边界扩展率k的表达式。
入流风速建模对精准预测风力机尾流至关重要。早期模型忽略了风切变的影响,采用轮毂高度的风速作为入流条件。随着风力机直径增加,忽略剪切风影响造成的误差会越来越大。He等[17]考虑了风切变效应,采用指数函数表示入流风速,提高了模型垂直方向上的预测精度。因此,开发考虑风切变的三维模型很有必要。
综上,本文考虑风切变的影响,提出采用二次多项式来描述尾流的三维分布,给出各维尾流边界扩展率k的通用表达式,建立三维椭圆多项式形状尾流模型(3DEP尾流模型),旨在提高预测精度和模型的适用性。
1 3DEP模型建立
1.1 Jensen尾流模型
Jensen模型的下游截面内尾流速度均匀分布,且仅与下游距离x有关,可表示为[8]:
u*=u0(1-2a/(1+kx/r0)2)
(1)

k=0.5/ln(zh/z0)
(2)
式中:zh为风力机轮毂高度;z0为地表粗糙度。
1.2 3DEP尾流模型建立
基于二次多项式尾流模型[23]来推导均匀流入风况下3DEP模型垂向的尾流风速分布。忽略风切变的影响,假设来流速度为定值,尾流速度u0(x,z)服从二次多项式分布:
u0(x,z)=Az2+B
(3)
式中A、B为需要确定的参数。为了确定参数A、B提出以下假设:
1)在尾流边界,尾流速度恢复到来流风速u0。
A(±rz)2+B=u0
(4)
2)3DEP模型和Jensen模型尾流半径相等,两者在尾流半径内具有相同的质量通量。如图1所示,在初始尾流半径r0处,3DEP模型与Jensen模型的质量通量相等;在rz处,3DEP模型与Jensen模型质量通量也相等,满足:

图1 Jensen模型和3DEP模型在垂直方向上的质量通量Fig.1 Mass fluxes in the vertical direction for the Jensen and 3DEP model

(5)
联立式(4)、(5)得:
(6)
式中尾流半径rz为:
rz=kzx+r0
(7)
式中kz为垂向尾流边界扩展率。
再将式(6)代入到式(3)可得u0(x,z)的表达式:
(8)
上述推导中忽略了风切变的影响,如图2(a)所示。考虑风切变后,尾流速度分布在垂向上呈现出不对称性,如图2(b)所示。风切变与均匀流之间产生的速度差Δu为:

图2 均匀流和风切变下3DEP模型垂直方向的速度分布Fig.2 Velocity distribution in the vertical direction of 3DEP model under uniform flow and wind shear
(9)
风速差Δu产生了额外的质量亏损Δm为:
(10)
考虑质量亏损,根据垂向根据质量守恒定理得:
(11)
联立方程(8)~(11)得垂向上风速分布的修正式:

(12)
尾流区任意高度的水平速度表示为:
(13)
式中ry=kyx+r0,ky为横向尾流边界扩展率。
当y=0时,式(13)等于式(12),联立两式求得C:
(14)
将式(14)代入式(13)得到3DEP模型的表达式:

(15)
1.3 各维尾流边界扩展率经验公式的修正
Xie[20]和Abkar[21]研究指出尾流区内横向的湍流强度大于垂向的,尾流边界在两方向的膨胀率呈现出各向异性,因此两方向尾流边界增长率不同,分别表示为ky和kz。定义ky和kz为轮毂高度处的流向湍流强度I0和推力系数CT的函数,代表2个方向的尾流边界扩展率[13,17]。在各向同性模型中,通过在一维高斯分布中指定尾流半径等于2.58σ来获取99%的概率,此时尾流边界扩展率k约为高斯标准偏差增长率k*的2.58倍[12]:
rw=2.58σ=2.58(k*x+εD)=kx+r0
(16)
式中:D为风轮直径;ε为x接近0时σ/D的值。
各向异性模型为了满足每个维度99%的概率,需指定二维高斯函数的各维尾流半径等于2.81σ,此时各维尾流边界扩展率应约为各维高斯标准偏差的2.81倍[17]。因此,参考He等[17]提出的各维高斯标准偏差增长率的公式,得到了各维ky、kz的表达式:
(17)
式(15)和(17)构建了3DEP尾流模型。该模型仅需I0和CT即可确定尾流边界扩展率,能够快速计算出风力机的三维尾流速度剖面。
2 模型验证
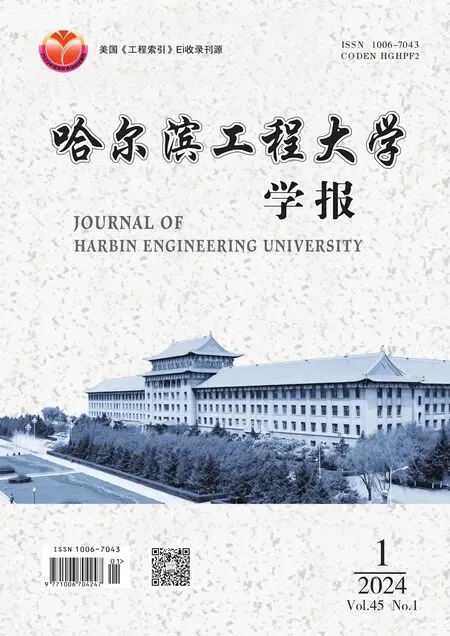
采用大涡模拟(LES)数据[24]对3DEP尾流模型进行验证,与其他3种模型进行对比,包括Jensen模型[8]、2D Jensen-Gaussian模型(2DJG模型)[12]及三维椭圆高斯模型(3DEG模型)[17],如表1所示。
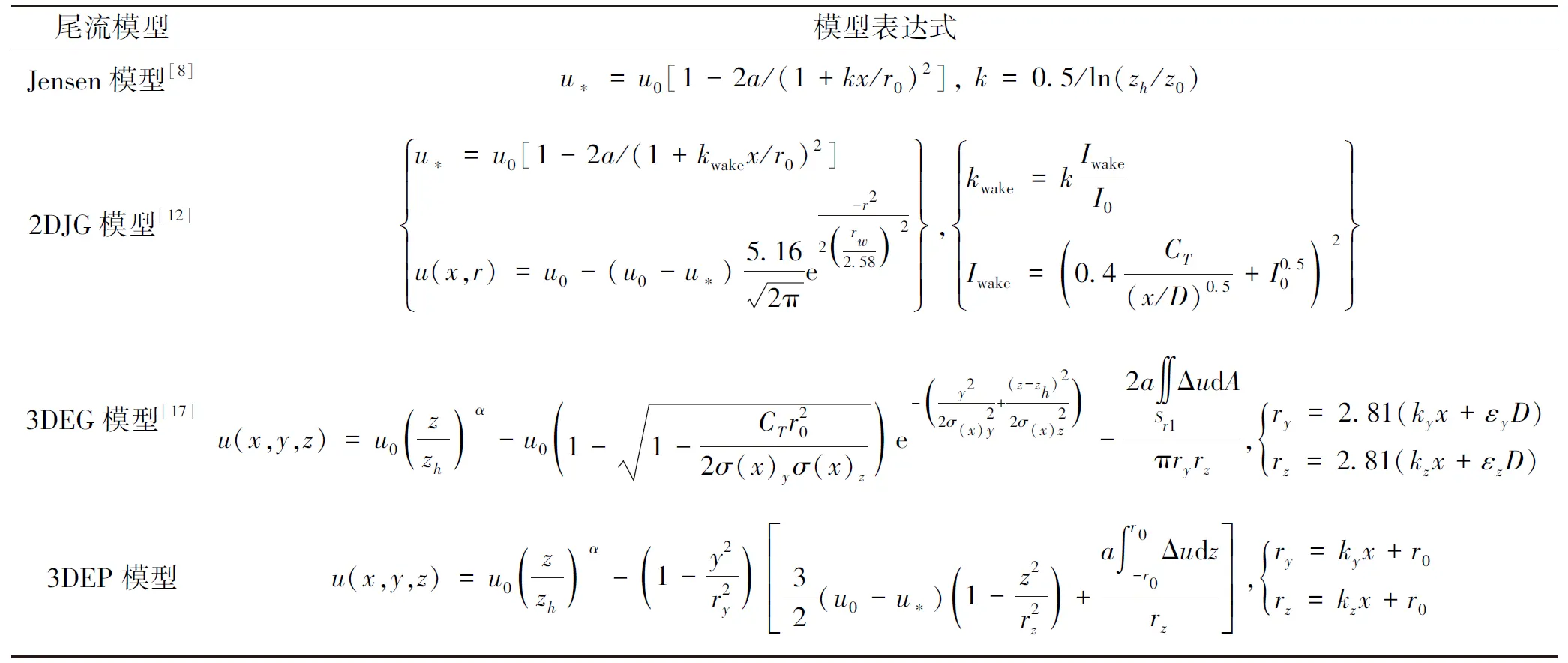
表1 4种尾流模型表达式Table 1 Four wake model expressions
Wu和Porté-Agel[24]研究了4种典型地面粗糙度(z0=0.5、0.05、0.005、0.000 05 m)下,2 MW风力机的尾流分布。风力机轮毂高度zh为70 m,转子直径D为80 m。轮毂处入流风速为9 m/s,推力系数为0.8,不同粗糙度下入流的湍流强度I0和风切变指数α见表2。采用I0=13.4%和9.4%代表陆上风力机的高湍流强度风况,I0=6.9%和4.8%代表海上风力机的低湍流强度风况。

表2 大气入流条件Table 2 Atmospheric influx conditions
2.1 陆上高湍流风况
2.1.1 水平剖面验证
图3为两陆上风况下x/D=5、7、10和15处3种模型与LES数据的横向速度分布对比。从图3可明显发现,3DEP模型能够合理地预测高湍流风况下的横向速度剖面,准确地预测了下游x/D=5、15处的横向风速,在下游x/D=7、10处及y/D=±(0.4~0.8)范围对风速稍有低估。2DJG模型在I0=13.4%时整体上高估了x/D=5、7处的尾流速度;在I0=9.4%时低估了x/D=5处尾流中心线附近的速度,高估了尾流中心两侧速度。Jensen模型为顶帽型速度分布,2种风况下均高估了尾流中心处的速度,低估了尾流中心线两侧的速度。

图3 2种陆上风况下模型与LES的横向速度分布Fig.3 Lateral velocity distribution of the models and LES under two onshore wind conditions
表3为图3计算的相对误差。3DEP模型整体上相对误差最小,2种风况所有误差都在3%以内;2DJG模型和Jensen模型在x/D=5处误差均较大,2种风况下都超过了7%。从表3还可发现,随着湍流强度从13.4%降到9.4%,2DJG模型和Jensen模型在各下游距离处的相对误差明显增大,但3DEP模型仍能保持较高精度,且误差在整体上有所降低,这说明了3DEP模型能够更好地反映湍流强度变化的影响。
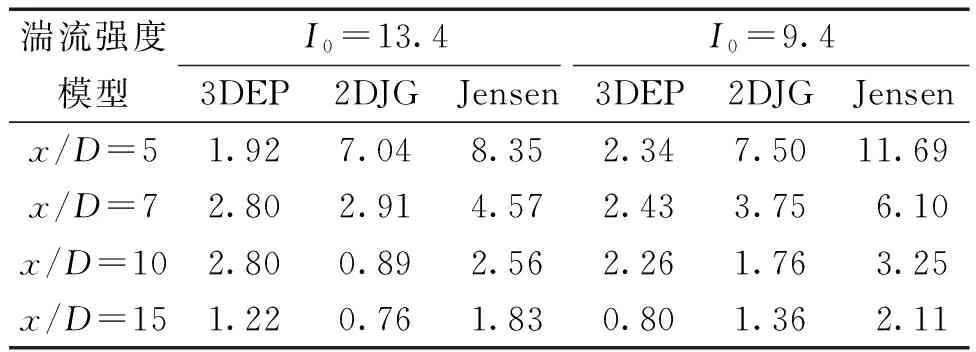
表3 2种陆上风况下模型横向相对误差Table 3 Lateral relative error of models under two onshore wind conditions %
图4为2种风况下3DEP模型在每个预测数据点的相对误差。从图4可以看出,3DEP模型预测结果准确,误差位于±4%的区间内。还可发现,轮毂周围误差更小,位于±2%区间,这说明3DEP模型能够较好地预测轮毂附近的尾流速度。
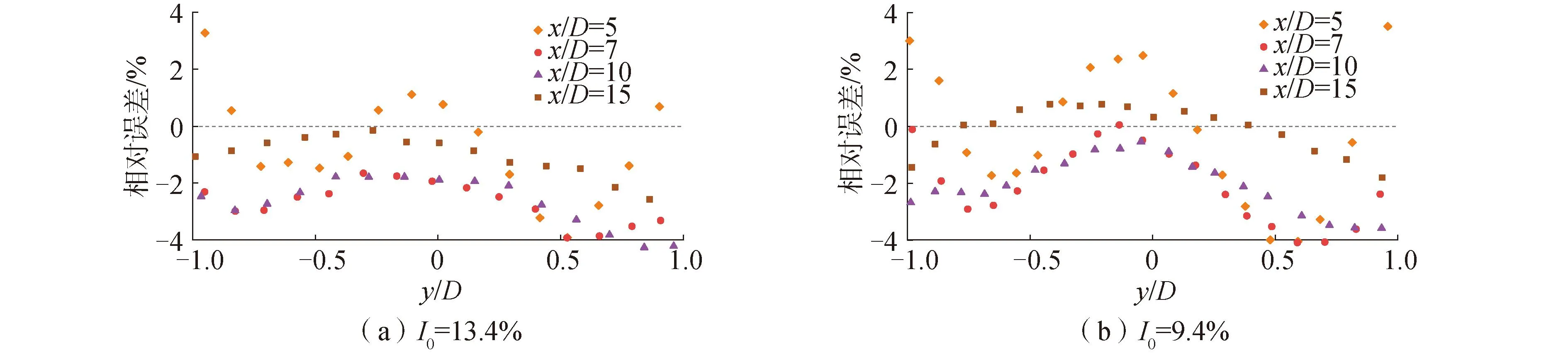
图4 2种陆上风况下3DEP模型横向剖面的相对误差Fig.4 Relative errors of 3DEP model lateral profiles under two onshore wind conditions
2.1.2 垂直剖面验证
图5为垂向尾流速度分布。2种陆上风况下,3DEP模型的预测结果与LES吻合较好。x/D=5处,3DEP模型略微低估了轮毂高度以下的风速。这可能是由于本文采用的入流风速公式与文献[24]中不同:文献[24]中采用了对数律来描述风切变入流,而本文则是采用指数律描述,两者入流风速在轮毂高度以下会产生些许差异。在x/D>5处,这种现象在逐渐消失。3DEG模型对下游4个位置处的风速有着不同程度的低估,误差在x/D=5处最大,随下游位置增加,低估量逐渐减弱。
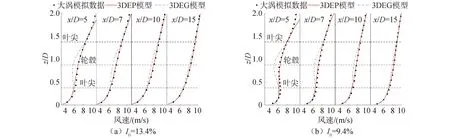
图5 2种陆上风况下模型与LES的垂向速度剖面Fig.5 Vertical velocity profiles of the models and LES under two onshore wind conditions
表4为2种风况下3DEP模型和3DEG模型在不同下游位置的相对误差。从表4可看出,3DEP模型的相对误差较小,随着下游距离的增加,误差逐渐降低。3DEG模型在x/D=5处相对误差较大,2种风况下均超过8%,在更远距离处误差才有所降低。
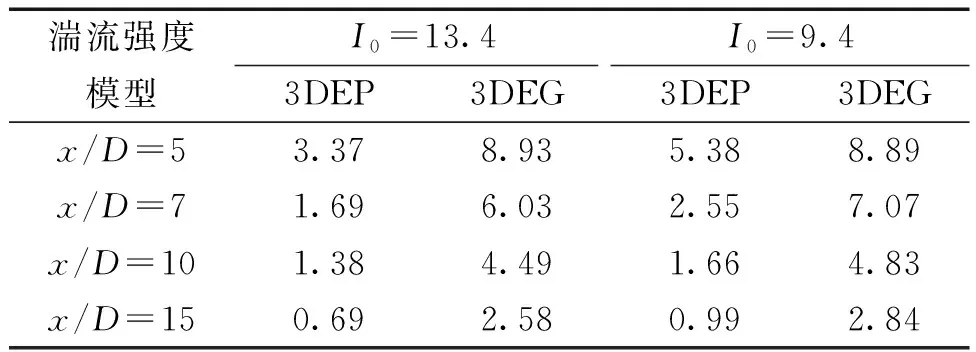
表4 2种陆上风况下模型垂向相对误差Table 4 Vertical relative error of models under two onshore wind conditions %
3DEP模型与LES结果的相对误差如图6所示。从图6可发现,尽管3DEP模型在x/D=5处的相对误差出现较大波动,但能够很好地预测轮毂附近的速度。在其他下游位置,3DEP模型具有较高的精度,相对误差处于±4%范围内。从图6还可发现,2种风况下,随着高度增加,几乎所有位置的相对误差呈从负到正的变化趋势,这意味模型先低估后高估了风速。这是由于3DEP模型忽略了垂向上湍流强度的变化,用轮毂高度处的恒定湍流强度来表示实际变化的环境湍流。

图6 2种陆上风况下3DEP模型垂向剖面的相对误差Fig.6 Relative errors of 3DEP model vertical profiles under two onshore wind conditions
2.2 海上低湍流风况
2.2.1 横向剖面验证
图7为海上(I0=6.9%和I0=4.8%)4个下游位置3种模型与LES数据的横向速度剖面。x/D=5处,3DEP模型高估了Y/D=0处的风速,低估Y/D=±(0.4~0.8)的风速。在更远距离处,3DEP模型预测的风速较LES数据更小。2DJG模型在x/D=5时误差较大,但能较好地预测尾流边界位置。Jensen模型表现出较差的性能;一方面由于顶帽形状假设,另一方面由于尾流膨胀率的选取没有考虑风力机的附加湍流强度影响。

图7 2种海上风况下模型与LES数据的横向速度剖面Fig.7 Lateral velocity distribution of the models and LES under two offshore wind conditions
表5为2种海上风况下各模型的相对误差。从表中可发现,随着湍流强度从6.9%减小到4.8%,3种模型的相对误差都有所增加,但3DEP模型增加的幅度最小。3DEP模型预测的整体误差位于±5%的区间内。2DJG模型在x/D=5处误差较大,2种湍流强度下分别为9.72%和11.20%,在更远距离处误差较小。Jensen模型整体上误差最大,在I0=4.8%时4个下游处的相对误差都超过了6%。

表5 2种海上风况下模型横向相对误差Table 5 Lateral relative error of models under two offshore wind conditions %
图8为2种海上风况下3DEP模型在不同下游位置处横向的相对误差。可发现,3DEP模型在x/D=5处的相对误差波动较大,最大误差接近10%,但仅限于少数几个点;在其他更远下游位置的相对误差较小,误差范围为-5%~2%,说明3DEP模型能够很好地预测海上风况下风力机尾流的横向速度分布。

图8 2种海上风况下3DEP模型横向剖面的相对误差Fig.8 Relative errors of 3DEP model lateral profiles under two offshore wind conditions
2.2.2 垂向剖面验证
图9为下游位置的垂向尾流速度分布。同陆上风况情况类似,海上风况下3DEP模型高估了轮毂上方区域的风速,低估了轮毂下方区域的风速,这在x/D=5处十分明显。在其他下游处,3DEP模型与LES一致性较好。相比而言,3DEG低估了轮毂周围的风速,且随湍流强度降低,这种低估在逐渐变大。

图9 2种海上风况模型与LES的垂向速度剖面Fig.9 Vertical velocity profiles of the models and LES under two offshore wind conditions
两模型垂向上的相对误差如表6所示。3DEP模型在I0=4.8%时x/D=5处的相对误差较大,达到了9.24%;在其他下游位置的误差较小,均小于3%。与3DEP模型类似,3DEG模型在x/D=5处误差最大,I0=6.9%和I0=4.8%下分别为8.87%和10.96%;x/D=15时误差最小,分别为2.4%和3.64%。
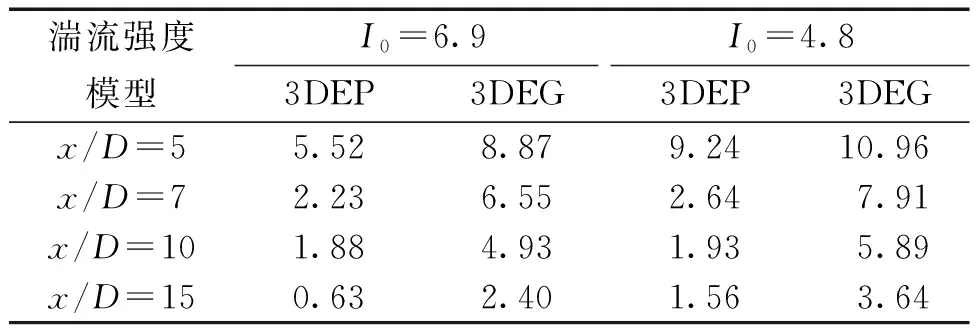
表6 2种海上风况下模型垂向相对误差Table 6 Vertical relative error of models under two offshorewind conditions %
海上风况下不同下游处3DEP模型垂向的相对误差如图10所示。从图10可发现,2种海上工况下,3DEP模型均在x/D=5处误差最大,最大误差位于叶尖顶端以上0.5D位置。在其他下游位置处,3DEP模型的相对误差均较小,基本在5%以内。

图10 2种海上风况本文模型垂向剖面的相对误差Fig.10 Relative errors of 3DEP model vertical profiles under two offshore wind conditions
3 结论
1)该三维模型假设尾流速度呈多项式分布,避免了高斯标准偏差等系列复杂抽象概念,大大降低了模型的复杂度。定义尾流边界为速度恢复到来流风速的边界,物理上更具直观性。
2)考虑了尾流的各向异性膨胀,给出了横向和垂向的尾流边界扩展率k的表达式,反映了横向和垂向的尾流边界变化差异。
3)与LES计算结果对比表明,本文模型能够精准地预测不同风况下x/D=5~15区域内横向和垂向的尾流速度分布。与传统模型相比,最大误差和最小误差均最小,总体精度最高。
猜你喜欢
上海涂料(2021年5期)2022-01-15
测控技术(2018年5期)2018-12-09
制造技术与机床(2017年10期)2017-11-28
雷达学报(2017年6期)2017-03-26
制造业自动化(2017年2期)2017-03-20
大型铸锻件(2015年1期)2016-01-12
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
舰船科学技术(2015年8期)2015-02-27