基于谱残差法的主动声呐疑似目标自动拾取
2024-01-15 05:34余杰王平波蔡志明
哈尔滨工程大学学报 2024年1期
余杰, 王平波, 蔡志明
(1.海军工程大学 电子工程学院, 湖北 武汉 430033; 2.杭州应用声学研究所, 浙江 杭州 310012)
主动声呐的检测一般按距离、方位、多普勒等多维分辨元进行组织,形成广义上的探测空间。先进的装备及其信号处理,将产生大量精细的分辨元。为便于操作员观察与反应,一个探测周期(ping)内的分辨元数据,一般被抽取或转化为两维数据并被映射成经典的方型显示画面(即所谓的B显)。普遍地,距离-方位B显中往往存在多个强弱不一的回波亮点,它们对应于探测空间中的能量聚集,被称为局部极值点。进一步地,能量聚集不仅出现在一个分辨元上,有时将出现在相邻若干分辨元内,回波亮点即拓展为亮斑。几何上,距离尺度亮斑被解释为距离延伸,方位尺度亮斑被解释为角度延展;物理上,延伸或延展的成因较为复杂[1]。本文致力于在几何上自动辨识能量聚集点或有延伸延展的小斑,并且这种辨识是在强混响引入的连片干扰区、辐射噪声泄露引入的条带状干扰等复杂背景中完成的。因为这些大面积干扰也是能量聚集,其形态与位置具有不确定性,所以自动辨识亮点或亮斑是困难的。自动辨识亮点或亮斑,即自动拾取疑似目标,这是自主实施目标接触、跟踪与属性辨识的基础。随着检测能力的提升,方位-距离B显的态势愈发复杂,依靠人工拾取疑似目标的困难越来越大,尤其在长时间连续值守、大量虚警使操作员注意力与心理压力不堪重负的情况,自动化方法亟待发展。
文献[2]中提出过一种疑似目标自动拾取算法,综合运用图像分割与形态学、统计模型拟合等方法形成自动化拾取疑似目标解决方案。针对距离-方位B显图像的前景与背景区域,基于统计规律,分别自动估算其拾取阈值,可有效拾取疑似目标。然而,该方法达成疑似目标低漏报时,其虚警率却不容小视。从几何上讲,疑似目标亮斑结构及亮点位置相对稳定,而虚警亮点则变化起伏较大,在相邻ping之间没有明显的相关性。但是对于单ping主动检测输出,没有足够的信息用于对疑似目标是否虚警做出判别。文献[2]的疑似目标拾取方法的核心机制在于计算亮点的“视在信噪比”是否超过阈值,本质上为一种改进的局部相对能量法。但是,某些虚警点也可能满足“视在信噪比”阈值条件而被拾取。若将单ping的检测输出视为图像,那么,除了亮点的局部特征之外,亮点在整幅图像上的全局特征相衬下的特异性也将成为有用的信息,本文方法的核心思想由此引出。数学上,可将多维分辨元上的检测输出值抽象为多元变量的函数。将距离-方位两维分辨元映射为两维显示元(像素点),而函数值映射为色彩值或灰度值,那么距离-方位B显可类比于自然图像,文中将之称为主动声呐图像(尽管它可能没有自然图像所具有的轮廓、纹理等通常特征)。
根据主动声呐图像的概念,本文提出一种基于视觉显著性谱残差法[3]的疑似目标自动拾取新方法。剖析了谱残差处理方法对主动声呐图像普遍适用性的内在逻辑(特别是显著性物体与奇异性的内在联系)后,构建起基于谱残差法(SR法)的疑似目标自动拾取算法框架,分析其关键机理。最后,以海试数据验证新算法的效能,证明相较于局部相对能量分析方法而言,本文方法具有优势。
1 图像视觉显著性检测的谱残差法
1.1 视觉显著性的概念
视觉显著性研究源于对自然图像的观察。一张自然图像中往往存在吸引人注意力的部分,与其他部分相比,这部分往往具有较为独特的特征。视觉系统的一个基本原则是抑制对频繁出现的特征的反应,同时对偏离规范的特征保持敏感高效[4]。
许多算法被提出用于处理自然图像的视觉显著性[5-9],其机制及具体方案各异,但核心思想是找到一幅图像中最显眼的部分。“显眼”对应一种心理现象,但的确也对应图片整体与特异部分的客观关系。在如图1(a)所示的自然图像中,显眼部分往往对应于前景,或感兴趣的物体,而不显眼的部分往往对应背景。
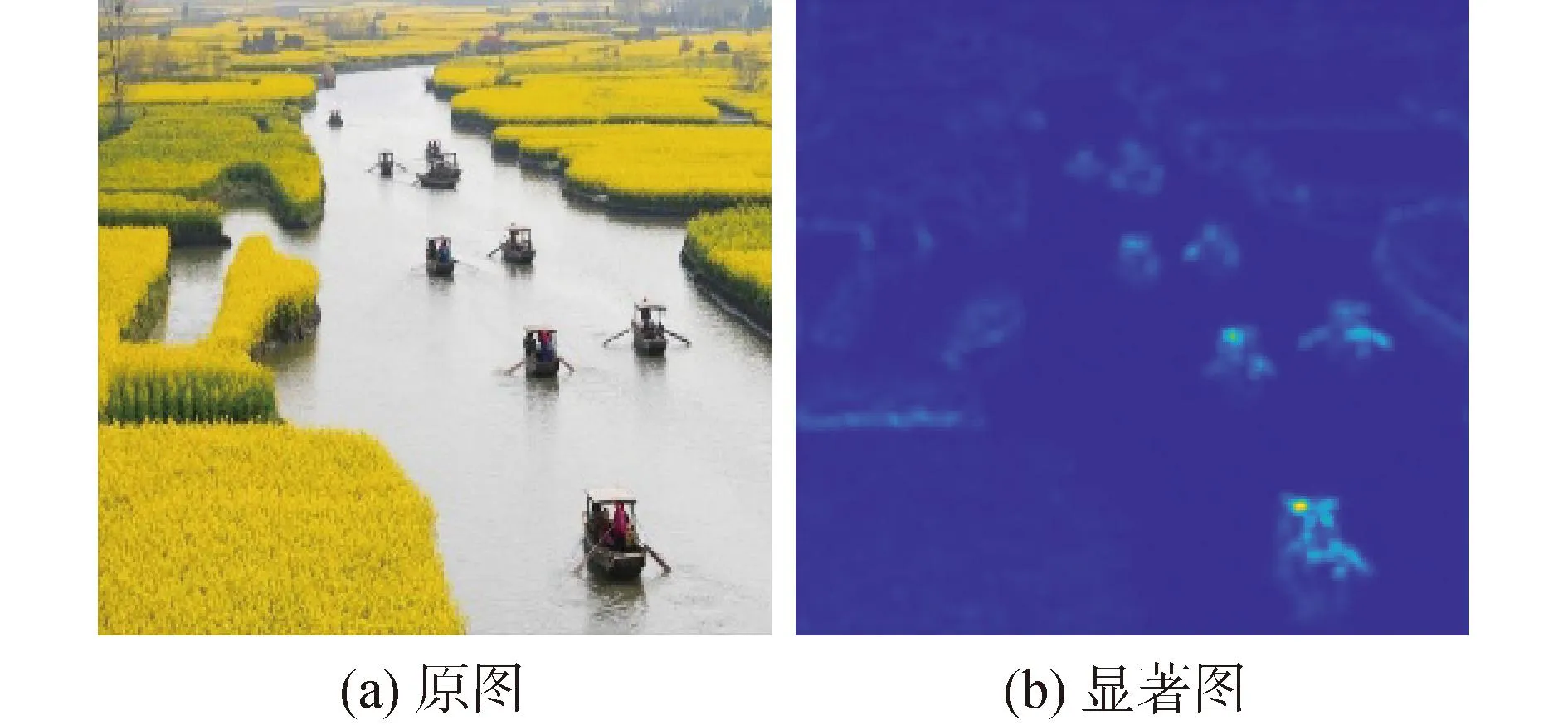
图1 自然图像及其显著性Fig.1 Natural image and its saliency
图1(b)的显著图,既表达了显著性分布,又表示了显著性强弱。可以看出,河流和花海都不显著,而手摇船则相对显著。这符合人眼的直观,同时也符合“从全局看,较为稀有、特异、突变的部分是较为显著”的客观事实。
1.2 谱残差法检测机理
视觉显著性可通过谱残差(spectral residual,SR)算法获得[3]。
在自然图像统计的不变性因素中,尺度不变性是最著名和研究最广泛的。此属性也称为1/f定律[10-11]。它指出自然图像集的平均傅里叶频谱的幅值A(f)与频率呈反比关系:
E{A(f)}∝1/f
(1)
图1(a)的频谱幅值强度随频率的分布如图2所示,其对数幅度谱将与频率成反比。
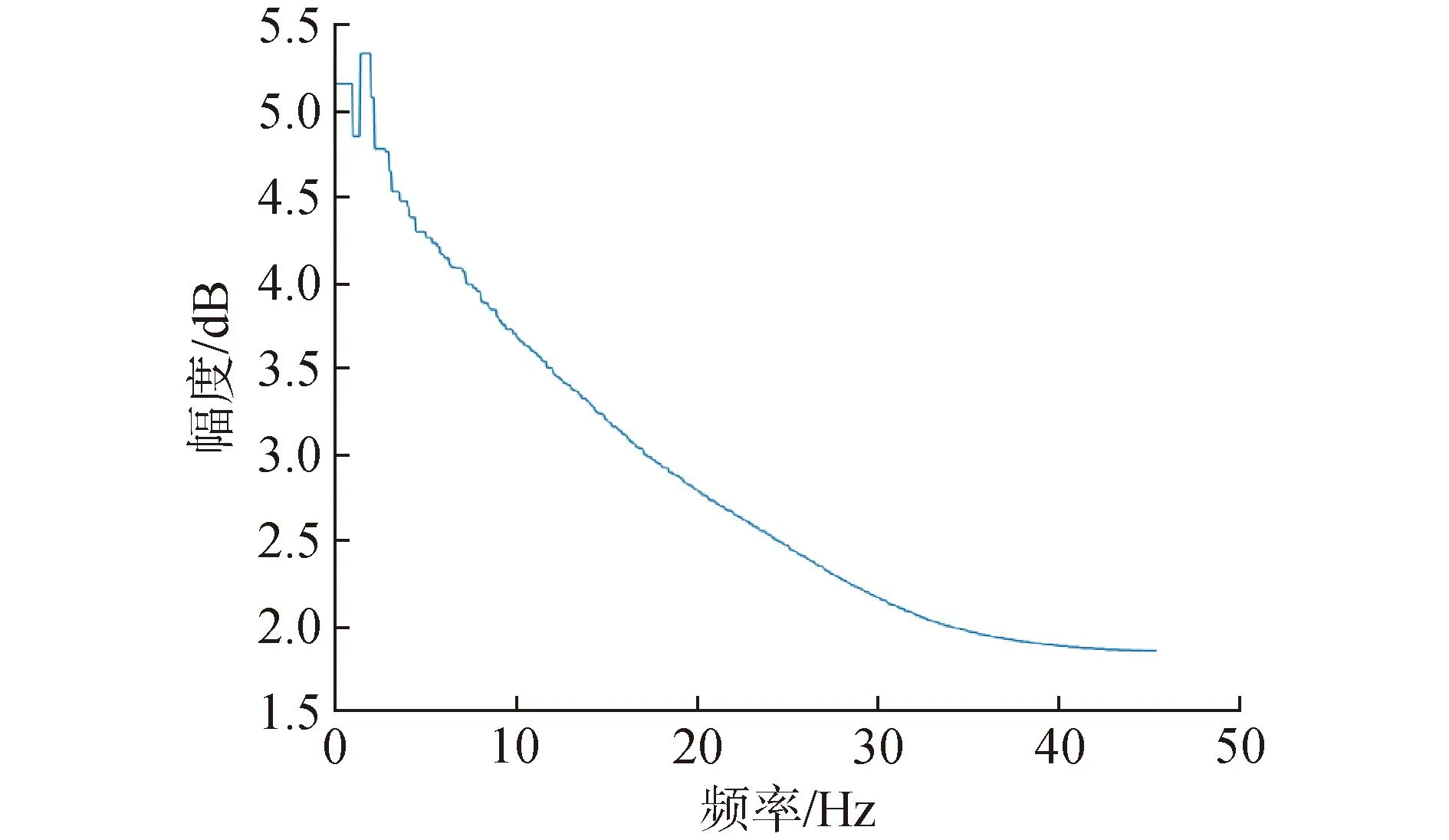
图2 自然图像的幅度谱分布Fig.2 Amplitude spectrum distribution of a natural image
图2的曲线中有较小的“毛刺”。这些“毛刺”正对应这幅图像中的显著部分,而曲线较为平滑的平均谱趋势则对应于图像中不太显著的部分。曲线越平滑,则冗余信息越多;反之,即“毛刺”越多则往往对应着“创新”信息越丰富。SR算法的思想即通过减掉图像的冗余信息,突出剩余的新息。
我们研究了多种主动声呐图像的频谱幅度统计特性,发现它们与自然图像的分布规律类似。图3给出了代表性结果。可以看出,主动声呐图像的对数谱随频率的变化也符合1/f定律,谱分布曲线上也呈现出较小“毛刺”。经分析,检测系统的技术参数及环境中干扰与背景成分,均不影响上述的1/f总体分布及分布曲线上的新息表达。

图3 主动声呐图像的幅度谱分布Fig.3 Amplitude spectrum distribution of an active sonar image
考虑图4所示的人工图形组成的图像,其中有若干矩形和一个半圆环形。由SR法分析的显著图,表达半圆环处的显著性最高,体现了其特异性。所以,SR法是自底向上的方法,它善于发现图像中的特异部分,而这些特异部分既可说明其注意力上的显眼性,也可说明较弱的特异性。这正是在主动声呐图像中拾取疑似目标的核心需求。主动声呐图像中的亮点或小斑,特异于辐射噪声泄漏形成的亮带或者较大连片的混响,因为其所占的面积相对最少。

图4 图像中的特异部分及其显著性Fig.4 Specific part and its saliency in an image
1.3 针对主动声呐输出的适用性分析
典型地,一个ping所形成的距离-方位B显即为一幅主动声呐图像。该图像中同时存在混响、辐射噪声泄漏、杂波和目标回波等复杂元素,如图5所示。其中,图5(a)是一幅完整图像中的典型混响干扰区,而图5(b)是一幅完整图像中的局部,其中的条带状干扰对应某种辐射噪声的入侵,该噪声的主能量分布与主动信号接收波段相重叠。

图5 主动声呐图像(局部)Fig.5 Active sonar image (one part)
显然,一幅主动声呐图像的非显著性或非奇异性必然是:1)探测背景(深灰色部分)最不显著;2)面积较大的混响区域与较长的条带状干扰相对不显著。孤立的亮点是显著的,整幅主动声呐图像中它们所占据显示元较少、分布稀疏,较为奇异。大量实测数据分析表明,几乎所有的主动声呐图像都符合上述的规律性认知。
视觉系统善于处理图像全局与局部之间的关系,微小能量局部可能因和全局相比在形态、纹理、连通关系等方面较为特异而显著。这些并不是梯度法和能量法等通常的图像处理方法所捕捉的。需注意,能量较弱的点未必不显著,因为其特异或暗合于稀有之意。总之,特异并非一种模式化的局部形态,而是对全局而言的稀有。从这个意义来讲,小的且少量散在的杂波点可能被拾取,但可以通过多ping的连续观察予以进一步甄别。
而杂波点,特别是海底反射形成的杂波,也可以能量很强,但形成的点却未必与其他形态特异。
2 疑似目标自动拾取算法模型
本文以混响、辐射噪声干扰等复杂强能量的屏蔽,以及亮点或小斑的特异能量的提取为主要目标,对常规SR算法做适应性优化与外延拓展,整体框架如图6所示。
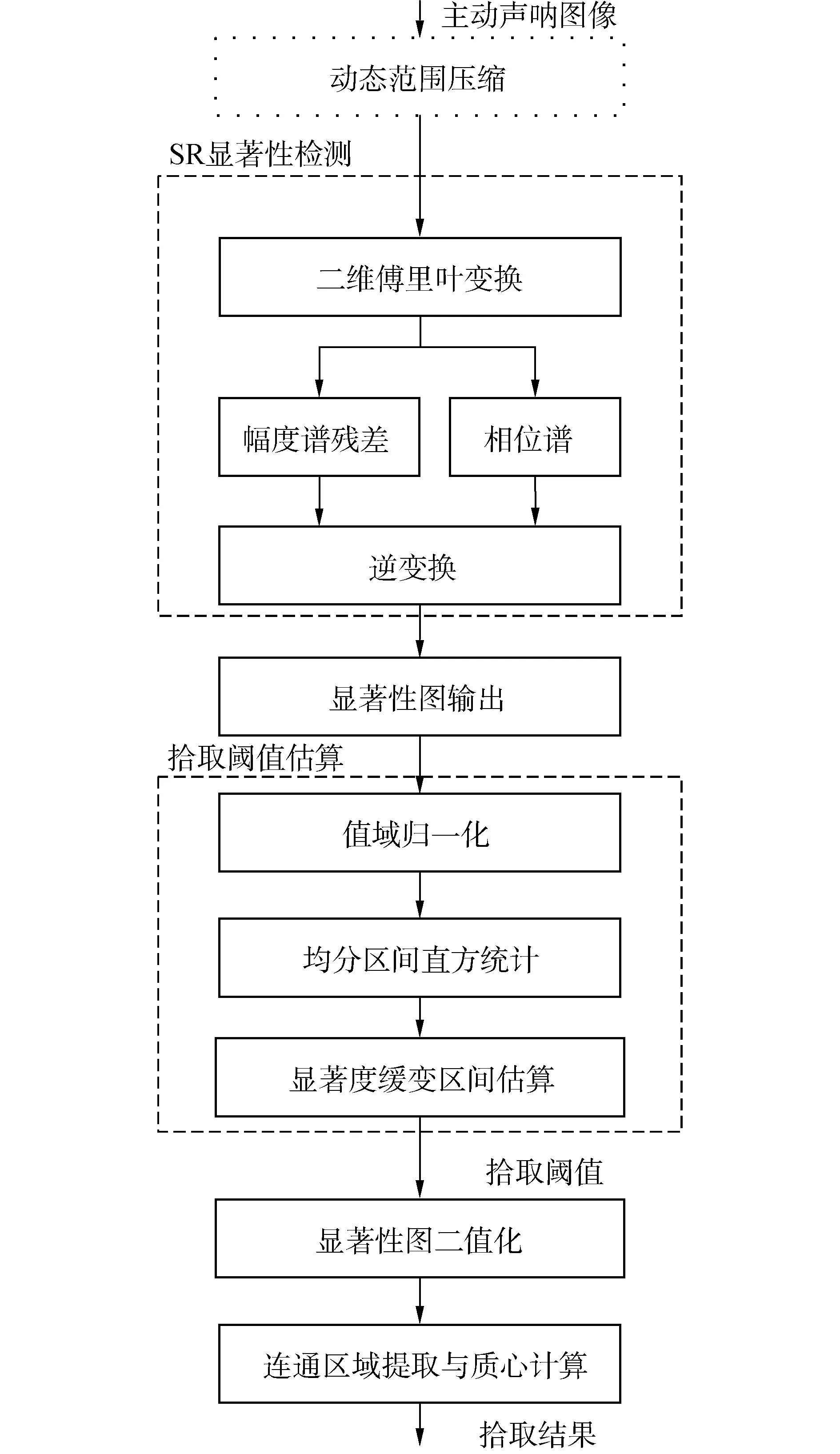
图6 疑似目标自动拾取方法的总体框架Fig.6 The overall framework of suspected target automatic pickup method
2.1 动态范围压缩
原始的主动声呐图像的全局动态范围可达数十分贝,往往超出人眼观察的注意力范围。为了不丢失信息,且不影响视觉显著性判断,须首先进行对数化动态范围压缩,即:
g(x,y)=sgn[gori(x,y)]ln|gori(x,y)|
(2)
式中:gori(x,y)为原始的主动声呐图像;sgn表示符号函数;x和y为B显图像上的2个维度上的显示元或分辨元坐标。
2.2 SR显著性检测
对g(x,y)进行二维傅里叶变换,即:
(3)
进而,对数幅度谱与相位谱分别为:
A(u,v)=ln[|G(u,v)|]
(4)
H(u,v)=ang[G(u,v)]
(5)
运用平均卷积核对A(u,v)进行平滑,可得:
(6)
式中wn是n×n的平均卷积核。
谱残差R(u,v)被定义为:

(7)
可见,R(u,v)是整体稳态的,即将幅度谱与其平滑值相减后,只在变化趋势的非均匀部分(即图2及图3(b)中的“毛刺”)是瞬变的,而在其他部分,因其符合1/f定律,所以其差将皆为平稳近0值。注意,这里讨论的是主动声呐图像的幅度谱变化趋势的稳态性,并非主动声呐信号的平稳性,二者并不直接相关。无论信号平稳与否,其处理图像都符合式(1)中所述的1/f定律,其谱残差R(u,v)即能表征图像中较为显著的部分。
由R(u,v)和H(u,v),通过逆傅里叶变换可得显著图Gs(x,y)。
因背景起伏,一次显著性检测后的显著图中,疑似目标亮点与背景之间的差异不够明显,针对显著图可再进行一次SR检测。
经过SR检测后,真正亮点将因其全局特异,在显著图中的能量峰值非常明显。图7展示了一幅主动声呐图像的某个方位维度的截面波形,以及该图像经SR算法后在相同方位上的显著性。图中用箭头标注的为目标回波峰值。可以看出,图7(a)的波束输出峰值很多,目标能量是局部极值点,相对其他峰值最高,但其他非目标的峰值不容忽略,足以混淆目标,在拾取阈值没有先验信息情况下也将被定为疑似目标。经过SR处理后,图7(b)的显著图展示相同波束上的峰值少了许多,并且所留下的目标峰值相对增高,表现出性能增益。
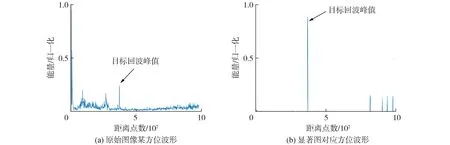
图7 主动声呐图像在某方位上的波形Fig.7 Waveforms at certain directions of an active sonar image
2.3 拾取阈值估算
显著图经过阈值判决,可形成二值化,由此可形成疑似目标的拾取。
阈值的选择,还可从显著图的某种统计规律中予以定量地、自动地获得。
显著图的灰度值即其显著度大小。经SR处理后,显著图中绝大部分的像素点的显著度都很低,在归一化的(0,1)内大都处于靠近0的地方,且高显著度呈非线性快速下降趋势,如图8(a)。

图8 显著图的灰度分布Fig.8 Gray distribution of a saliency map
考虑将归一化显著度均分为N份区间并统计其直方图,如图8(b)。可见,从左到右的等分区间上,像素点数或显示元数量迅速递减。直方图上从“陡峭”到相对“平坦”之处的分界,有理由被认为是一个可靠的界限,该界限的左边所对应的显示元,是那些十分不显著的因而可被屏蔽的,即可不考虑对其拾取。由此,搜索下式使之成立:
(8)
则阈值可估算为:
(9)
式中:Dn为第n(=1,2,…,N)个显著度区间所对应的显示元数;i=1,2,…,floor(N/SL),floor(*)表示对*向下取整;L为估算窗长,SL为估算步长。窗长与步长的调整可调节估算的精细与速度。δ为参考变化率,一般设为50%。
2.4 连通区域提取与质心计算
二值化后的显著图,每个像素值为0或1,值为1的前景像素点形成多个连通区域(Connected component),其中每个连通区域是一个像素点集合,其值相同且位置相邻(直接或间接)。每个连通区域一般都不止单个像素点,而是多点形成的“块”,和一个疑似目标相对应,例如,图9(a)中即有2个连通区域,可视为对应2个疑似目标。
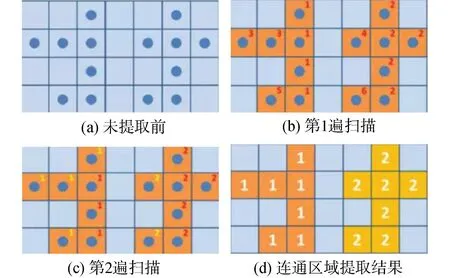
图9 连通区域提取two-pass法Fig.9 Two pass method for extracting connected regions
提取二值化显著图中的每个连通区域,加以标识区分,并计算其各自的质心,即可得到对应疑似目标的中心位置点。
应用2遍扫描(Two-pass)算法提取二值化显著图中每个连通区域,其处理过程如图9所示意。简要描述如下。
1) 连通区域标识处理初始化。
维护一个标识矩阵,其中元素表示待处理图像每个像素点的标识值;同时,维护一个集合列表,用于关联式存储已使用标识值。
2)第1遍扫描。
从左到右,从上到下遍历每个像素点,依次找到并考察所有前景点(像素值为1),标识每个点,并将具有相邻关系的点的标识数值置于同一集合。例如图9(b)所示。
①若任意点的左邻点或上邻点的标识值都为-1(无效),则用一个新的标识值标记该点。例如图9(b)中处于第1行第3列的像素点(简称点(1,3)),以及点(1,6)、点(2,1)等;
②若任意点的左邻点或上邻点的标识值中至少有一个不为-1,则更新该点的标识值为此2个相邻点中有效且较小的标识值;同时,更新对应的标识值集合。例如,图9(b)中的点(2,2)、点(2,3)、点(4,3)等,处理完图9(b)后,标识值集合列表应为[{1,3,5}、{2,4,6}]。
3)第2遍扫描。
将每个连通区域的每个像素点的标识值替换为其同一标识集合内的最小值,如图9(c)所示。
4)质心计算。

疑似目标在方位维(x方向)上的展宽主要因能量在相邻几个波束上的泄漏,或该疑似目标的物理尺度确实跨了多个连续的波束角,这种方位展宽基本是左右对称的;在距离维(y方向)上的展宽主要体现反射体的径向尺度,若尺度较大,取其中心为其位置代表较为合理。特殊地,若反射体因物理尺度较大而跨方位,且在不同方位波束上具有不同的径向尺度,则其形成的亮点(亮斑)在几何上有可能非中心对称,取其质心指示该反射体的位置也较为合理,只是此时质心不一定是其反射能力最强的点。综上,以质心来代表疑似目标,仅仅是取用其位置信息,这是合理的,且不会影响声呐本身的方位和距离维上的分辨能力或估计精度。
2.5 疑似目标自动拾取方法效果解析
整套方法对一幅典型主动声呐图像的疑似目标自动拾取处理的中间态与最后结果见图10。为数据安全计,这里对主动声呐原图、动态范围压缩处理结果、以及阈值拾取结果都只展示其代表性局部。所有图像的横纵坐标都分别为方位和距离。

图10 本文方法效果的解析Fig.10 Analysis of the effectiveness of the method in this article
其中,图10(a)为主动声呐图像,是疑似目标拾取之前的输入,因动态范围很大,几乎无法展现探测信息。一般需对其动态压缩,图10(b)为对数化压缩动态范围的主动图像,可见其相当复杂。可以讲,疑似目标就在其中,若有先验信息,如对合作目标进行探测以鉴定声呐性能,那么有经验的操作员可在其复杂图像中找到疑似亮点。但若在没有先验信息的实际场景中,疑似亮点便难以发现,声呐实际性能便急剧下降。
图10(c)为SR法处理结果,即显著图,呈灰度分布,图中大部分区域的显著性都很低,如图8(a)所说明的那样,而少数的像素点被衬托出亮度,最亮的一些点可被轻易察觉,对应的是特异性最强的疑似目标亮点;SR法的核心是一种全局的频域分析,其变换窗大小默认与一ping完整的主动声呐图像相同。混响亮区、辐射噪声亮带这些典型的干扰大都在方位维或者距离维上贯穿整幅主动声呐图像,采用这种全局性变换窗,疑似目标亮点的特异性会更明显。
显著图中还有些较为暗淡的点,可能也对应着疑似目标,只是特异性稍弱。因此,需估算恰当的阈值将感兴趣的疑似目标亮点尽可能拾取,且又不至于引入过多虚警,如图10(d)所示的估算拾取阈值的关键是找到显著度的分界点,使得显著度高于分界点的那部分里的任何显著度级别在显著图中都较为稀有,而低于分界点的那部分则大量存在。而这个分界点由2.3节已讨论的主动声呐图像显著图的统计规律而容易被估算得到。
确定阈值后,将显著图以此为界做二值化处理,形成多个值为1的连通区域,为前景,以及一整片值为0的背景;将所有的连通区域提取并标识之后,计算各个区域的质心,即可对应待拾取疑似目标的中心点。如图10(e)为二值化之后的显著图,其中待拾取的连通区域约为10个,经处理后,得到各连通区域的质心,并以圆圈标识在调亮的主动声呐原始图像上,以直观验证拾取效果,如图10(f)所示。
图10(f)中,各圆圈的中心位置上大都存在肉眼可见的疑似目标亮点,或呈孤立亮点,或在辐射噪声亮带上,或在混响连片干扰区内,体现了SR方法拾取疑似目标的抗干扰能力;这些亮点或明或暗,在拾取到较暗的弱目标点(例如图10(f)右上角的圆圈)时也没有引入过多虚警亮点的拾取,体现了以全局特异为核心机理的拾取方法的优势。
3 海试数据验证与对比分析
采用某主动声呐样机海上试验数据对本文算法进行验证。该数据涉及若干连续ping,其对应的主动声呐图像存在明显的混响干扰区、条带状干扰以及拖船干扰等。选取其中某航次共计73个ping的主动声呐图像进行处理。
其中,第10和第12个ping(分别记做ping10和ping12)的结果被用于展示,本文选择文献[2]中所提的主动声呐疑似目标自动拾取方法为对照方法,结果如图11所示,图11中的主动声呐图像为一个主要的局部。

图11 海试数据处理结果Fig.11 Processing results of sea trial data
ping10和ping12中有3个确知目标,记作目标1、2、3,其中,目标3正好位于辐射噪声亮带上。
图11(a)、(b)所示,ping10中,对照方法和本文方法都拾取到了全部的1、2、3号目标;然而,对照方法还拾取到了不少辐射噪声亮带上的局部能量峰值点。图11(c)、(d)所示,ping12中,本文方法拾取到全部的1、2、3号目标;然而,对照方法遗漏了2号目标,此时,2号目标较弱。
考察连续10个ping的拾取结果,并统计了算法的总拾取点数以及对已知目标的漏报数,如表1。
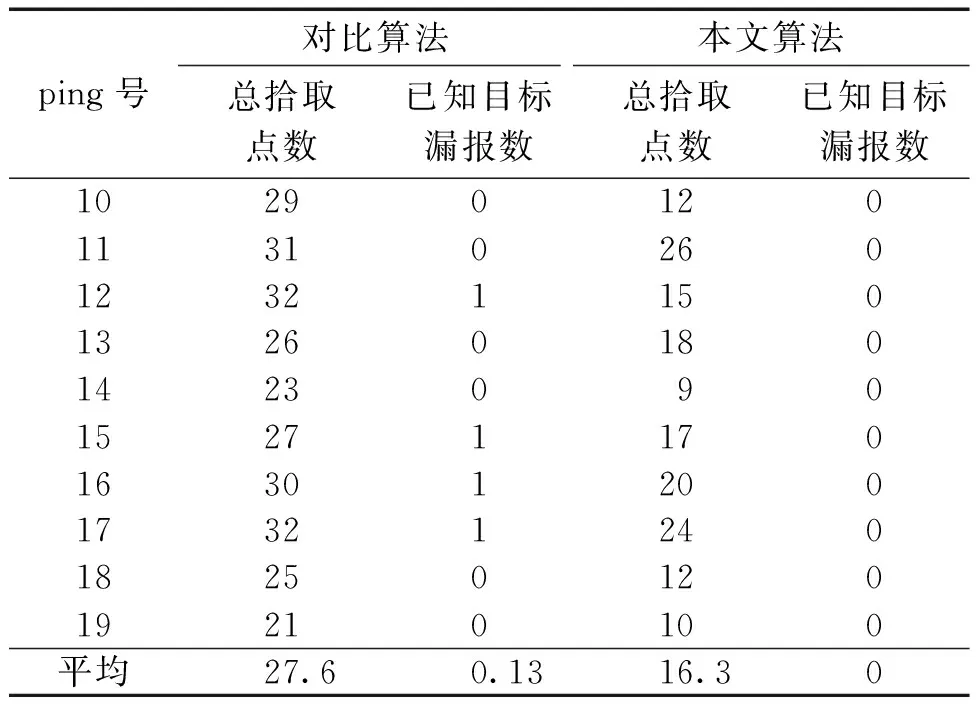
表1 方法拾取与漏报性能比较Table 1 Comparison of pickup and misreporting rates
这10个ping中,1、2、3号目标都未消失,且存在目标的强弱变化(其中2号目标在其中3个ping十分微弱)。由表1所示,本文方法在确知3个目标时,总拾取点数平均为16.3,比对照方法减少了40%,这可以反映疑似目标虚警的减少;同时,对照方法在4个ping中都出现了对3个已知目标的漏报,平均漏报率达13.3%,而本文方法在连续10ping中,对3个已知目标都没有漏报。
另一方面,统计相同条件下的单ping平均处理时间。对照方法为:5.78 s,本文方法为3.63 s,本文方法比对照方法减少了37%。这也体现了基于快速傅里叶变换的全局频域方法比基于复杂的图像形态学的方法更加节约计算资源。
深入分析可知,若在探测过程中发现探测空间中存在数量较多的海底反射体形成较强的疑似目标亮点,真实的水下运动目标亮点相对较弱,则本文方法相比于对照方法而言适用性更强。因为根据“稀有≈显著”的原则,孤立的海底反射体亮点相较于成片的混响亮区和成条的辐射噪声亮带更显著,而较少的较弱疑似目标亮点又相较于较多的较强海底反射体亮点更显著。反之,对照方法会因海底反射体较多而使得统计估算得出的拾取阈值被抬高,从而提高了对较弱疑似目标的漏报几率。
4 结论
1)本文提出了一种基于谱残差法的主动声呐疑似目标自动拾取新方法。通过研究主动声呐图像与自然图像在频域上统计分布的相似性,而后基于谱残差法,对主动声呐图像进行显著性分析,得出主动声呐图像的显著图,进而基于显著图对疑似目标进行自动阈值拾取。基于主动声呐显著图的统计规律设计的拾取阈值估算方法解决了阈值自动化的问题。
2)海试数据处理结果表明,本文方法可有效实现疑似目标自动拾取,并且相较于对照方法有如下优势:在对已知目标的拾取中,没有漏报,并且疑似目标虚警得到明显改善,减少约40%;运算速度明显更快,处理时间比对照方法平均减少约37%。
3)本文方法与对照方法性能差异的物理机理,即:本文方法更注重全局,基于对全局的奇异部分的加工提取,而对照方法则更注重局部,基于对局部视在信噪比的计算评估。后续可结合实际应用场景的特点和需求,发展这2种方法的相互印证和优化结合,以期进一步提高目标自动拾取的准确率。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
幼儿园(2021年12期)2021-11-06
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
火控雷达技术(2016年2期)2016-02-06