基于事件触发机制的动力定位系统神经自适应控制
2024-01-15 05:56孙创覃月明夏天夏国清
哈尔滨工程大学学报 2024年1期
孙创, 覃月明, 夏天, 夏国清
(1.宜昌测试技术研究所,湖北 宜昌 443003; 2.上海船舶工艺研究所, 上海 200032; 3.哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001)
动力定位(dynamic positioning,DP)技术是指在环境干扰的影响下仅依靠自身推进系统使船舶保持在期望位置或是沿期望的轨迹航行[1]。随着对海洋资源的不断勘探和开发,DP系统被广泛应用在各种海洋工程作业中,如:海上工程船、供应船、救援船、浮式酒店和浮式生产船等[2]。DP系统的控制设计在理论和实践中都引起了广泛关注。
由于船舶作业条件和海洋环境的持续变化,船舶模型参数和环境干扰难以精确测量,在进行控制设计时需要加以考虑。随着神经网络逼近技术的发展,神经网络逼近技术被用于处理船舶不确定性控制问题。文献[3]针对模型不确定下的全驱水面船设计了一种神经自适应积分滑模控制策略,实现船舶的高精度跟踪控制。文献[4]在未知非线性动力学条件下,结合神经网络自适应方法实现了水面舰艇有限工作空间的高精度跟踪控制。文献[5]针对模型参数不确定和时变干扰下的DP控制,结合自适应技术设计了控制律。然而,上述方法中神经网络权值矩阵的大量参数需要在线调整。这将会导致学习时间变得很长,以至于基于神经网络自适应的技术难以在实际工程中应用。
此外,执行机构的高频响应会导致机械磨损,减少执行机构的使用寿命[7]。事件触发控制(event-triggered control, ETC)能够减少传输和计算的负担[8],近些年受到学者的关注[7-11]。ETC提供了一种有效的执行任务的机制。在这种控制机制下,只有当某个事件被触发时,控制信号才会被传输。在ETC中任务的执行依赖于设计的触发机制而不是按时间周期,这将会降低控制器到执行机构的信息传输负担,减少了执行器的动作次数。ETC控制策略已经成功的应用线性系统[8]、非线性系统[9]、机器人的跟踪控制[10]、水面船的自动舵控制[7]和目标环绕控制[11]。因此,研究ETC在DP系统中的应用具有实际工程意义。
基于上述分析,本文研究含有模型参数不确定和环境干扰的水面船DP控制问题,提出了一种基于事件触发机制的神经自适应控制方法。结合径向基函数神经网络和最小学习参数算法设计自适应项补偿环境干扰和不确定性。设计的自适应项仅有3个在线学习参数,减少了传统神经网络自适应技术的参数学习个数。再结合动态面控制技术和事件触发机制设计动力定位控制器,其中引入一种事件触发机制降低控制器到执行机构的信息传输负担,同时降低执行机构的动作次数。然后使用Lyapunov稳定性理论证明了闭环系统的稳定性。最后,通过仿真试验和对比分析验证了提出控制律的有效性。
1 预备知识和问题描述
1.1 径向基神经网络
RBFNN对不确定函数具有良好的逼近特性,被广泛应用在非线性控制系统中。对于RBFNN,有如下引理成立。

f()=WTh()+ε,∀∈Ω
(1)
本文选择高斯函数作为径向基函数:
hj()
(2)
式中cj∈Rn和bj∈R分别表示第j个高斯函数的中心向量和第j个节点的宽度。
在实际应用中, RBFNN的最优权值矩阵是未知的。因此,在设计控制器的过程中,需要对最优权值矩阵进行估计。
1.2 船舶运动数学模型
考虑三自由度水面船数学模型为[14]:
(3)
(4)

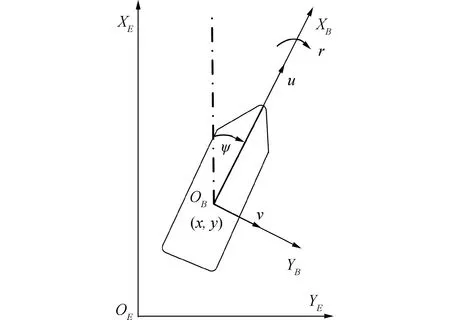
图1 大地坐标系和船体坐标系Fig.1 The earth-fixed frame and the body-fixed frame
(5)
假设1船舶的模型参数M和D均是未知的。
注1:在实际工程应用中,由于辨识技术或成本原因,动力定位船的模型参数M和D难以精确获得,因而假设1是合理的。
假设2环境干扰向量τd是有界的,即‖τd‖≤d,d>0是一个常数。
注2:船舶受到的环境干扰是慢变的,且能量有限。因此,环境干扰作用在船舶上的力可以被当作具有有限变化率的有界信号,假设2是合理的。

注3:动力定位船在作业时,有时候需要改变参考点。为使船舶更加平滑的运动到新的参考点,通常将参考点通过二阶导引系统,得到光滑的参考轨迹以及有界的一阶和二阶导数,因此假设3是合理的。
控制目标:针对含模型参数不确定和环境干扰的水面船,设计DP控制律,使得船舶从初始点沿着参考轨迹移动到目标点,且满足:
(6)
式中ο>0是一个常数。
2 DP控制律设计
2.1 基于ETC的神经自适应控制器设计
本节将使用动态面控制技术和ETC技术设计控制律,设计过程分为如下3步:
1)定义第1个跟踪误差面为:
z1=η-ηd
(7)
对式(7)求导,并使用式(3)可得:
(8)
设计运动学控制律为:
(9)
式中K1∈R3×3是设计的控制增益矩阵。将α通过一阶滤波器:
(10)

2)定义第2个跟踪误差面为:
(11)
根据式(11)和(4)可得:
(12)

τ=-K2z2-f1
(13)
式中K2=diag{k2,1,k2,2,k2,3}∈R3×3是设计的控制增益矩阵。由于模型参数M和D均未知,因此这里采用RBFNN对f1进行估计:
f1=WTh()+ε
(14)


(15)

(16)

(17)
3)定义τ(t)=[τ1(t)τ2(t)τ3(t)]T,根据事件触发控制,最终设计动力学控制律为:
(18)
式中:
(19)

注4:当ai选择较大时,执行机构动作次数会减少,动力定位船的定位误差会变大,系统稳态性能变差,动态性能无影响;反之当ai选择较小(或接近于零)时,事件触发控制逐渐变为时间触发控制,系统稳态性能较好(等于零稳态性能最优),动态性能无影响。实际应用时,ai可以根据需要选择,即在保证定位误差要求的范围内选择足够大的ai,达到减少执行机构动作频率的目的。
本文的触发条件建立在控制器和执行机构部分。对于输入信号触发机制而言,相对阈值触发条件[10]和动态触发条件[14]可能存在不能保证最小正时间间隔,这意味着可能存在Zeno行为,即在有限时间内,事件触发的次数为无穷。由于触发条件不断被满足,控制器无法有效地调整触发时间间隔。Zeno行为不仅在物理上无法实现,还会造成系统信号无法收敛甚至系统不稳定,违背了设计事件触发控制器来减小触发次数的初衷。而对控制信号采用固定阈值触发条件能够避免Zeno行为。因此,本文采用固定阈值触发条件设计控制律。
(20)

2.2 稳定性分析
定理1对于水面船数学模型(3)和(4),在满足假设1~3的条件下,由设计的运动学控制律(9),动力学控制律(16)和更新律(17)组成控制器能够实现本文控制目标,且闭环系统内的所有信号一致最终有界。
证明:选择Lyapunov函数:
(21)
对式(21)求导,并使用式(20)可得:
(22)
(23)
σ1>0是一个常数。根据式(15),可得:
(24)
同时:
(25)
将式(23)、(24)代入式(25)中,可得:

(26)
式中:
(27)
(28)
式中:λmin和λmax分别表示矩阵的最小和最大特征值。显然c2>0,且通过选择参数使c1>0。根据定义的Lyapunov函数(21),可得闭环系统内的所有信号均一致最终有界。定理1证明结束。

证明:根据(19),可得:
(29)
根据式(16),ωi关于时间的导数为:
(30)
(31)
3 仿真结果与分析
本节采用供应船Northern Clipper[16]验证提出控制方法的有效性。仿真中环境干扰选择为[17]:
τd=RTb
(32)
式中b∈R3为一阶马尔可夫过程,具体形式为:
(33)
式中:T∈R3×3为时间常数矩阵;Υ∈R3×3为白噪声驱动矩阵;wb∈R3为零均值白噪声向量。仿真中参数选择为T=103I3;b(0)=[105105106]T;白噪声的标准差选择为0.1;Υ选择为Υ=diag(104,104,105);100 s后变为Υ=diag(105,105,106)。

为了使动力定位船平滑的移动到设定点,将设定点通过二阶导引系统[13]:
(34)
式中:ζ为导引系统的相对阻尼比;ωn为导引系统的固有频率。仿真中,设定点为ηd=[20°20°30°]T,二阶导引系统的参数选择为ζ=0.9和ωn=0.08。船舶状态和其他初始条件均设为零。

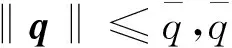
图2 本文方法下的船舶运动轨迹Fig.2 The trajectory of the vessel under the proposed method

图3 2种方法下的跟踪误差Fig.3 Tracking errors using two control methods

图4 自适应学习参数Fig.4 Adaptive learning parameters

图5 f1和它的估计值Fig.5 f1 and its estimate

图6 2种方法下的控制输入Fig.6 Control inputs using two control methods
接下来,与文献[5]和文献[18]采用神经网络逼近下的自适应参数个数进行比较(如表1所示)。通过表格可以得出,本文设计的自适应控制律能够减少自适应参数的学习个数,且不会随着神经网络节点的增加而增加。因此,本文方法可以有效地减少算法的计算量,缩短学习时间。

表1 使用神经网络逼近时自适应参数个数Table 1 The number of adaptive parameters using neural network
4 结论
1)设计的自适应项能够极大地减少神经网络的在线学习参数个数;
2)设计的控制律能够在保证跟踪误差收敛到一个较小的范围的前提下,降低输入信号的变化频率,实现减少执行机构动作的目的。
后续可将文中提出的控制算法应用船模试验或实船进行性能验证。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
电子制作(2019年19期)2019-11-23
船舶标准化工程师(2019年4期)2019-07-24
中国船检(2017年3期)2017-05-18
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27