基于加速度计余度配置的MEMS捷联惯导初始对准方法
2011-04-30 04:13钱伟行朱欣华
中国惯性技术学报 2011年6期
钱伟行,朱欣华,苏 岩
(南京理工大学 MEMS惯性技术研究中心,南京 210094)
随着MEMS惯性技术的逐步成熟,采用余度技术来提高系统精度可靠性已成为导航技术发展的一个热点。与常规的惯性测量元件(IMU)相比,MEMS IMU具有体积小、重量轻、功耗小、成本低、动态范围宽、响应速度快等诸多特点,而且易于安装调试,可通过余度配置、数据融合、故障诊断与重构等方式来提高系统的性能与可靠性[1-2]。
本文针对大俯仰角条件下弹载 MEMS惯导系统初始对准中横滚角精度低下的问题,进行了其影响因素的机理分析,提出了一种基于加速度计余度配置的捷联惯性导航系统结构及其初始对准改进方法,并将实际系统置于高精度转台上,验证了该系统结构以及初始对准方法的有效性与实际性能。
1 初始对准中横滚角精度影响因素的力学机理分析
惯性导航系统的初始对准一般分为粗对准与精对准两个阶段。常规的粗对准方法是通过惯性传感器敏感地球重力加速度与自转角速度来求解惯导系统初步的水平姿态与航向信息。常规的计算公式如下:

式中,gn=[0 0 -g]T为重力加速度在导航坐标系,地球自转角速度在导航坐标系上的投影,L为当地的纬度,0ω为地球自转角速率。近年来国内外的学者也提出过粗对准的改进方法[3],其计算公式为:
该改进方法的姿态精度相对于公式(1)有所提高,但其计算方法的物理本质是相同的。
精对准过程是采用最优估计理论方法对惯导系统的平台误差角以及惯性器件误差进行实时估计与补偿,从而进一步提高惯导系统的姿态精度与器件精度,航向角的对准通常采用多位置或转动基座的方式实现[4]。
上述初始对准方法中,惯性系统通常处于水平或者接近水平的条件下进行的,而在某些特定的条件下,惯导系统必须在大俯仰角的条件下进行初始对准(如某些智能弹药的发射环境),此时对准的横滚角精度将一定程度上受到俯仰角的影响。
通过转台实验描述该问题:将经过多位置法标定的MEMS IMU放置在某型高精度转台上,其精度如表1所示。控制转台使IMU处于不同俯仰角下,进行惯性系统的初始对准,粗对准采用公式(2)计算,精对准采用惯导线性误差模型与卡尔曼滤波器。以转台作为姿态基准,不同俯仰角条件下的载体横滚角精度如表2所示。

表1 MEMS惯性器件精度Tab.1 Precision of MEMS inertial instruments

表2 初始对准中横滚角精度与俯仰角的关系Tab.2 Relationship between precision of roll angle and pitch angle in initial alignment
由表2的实验结果可知,随着IMU俯仰角(即载体俯仰角)的增大,其横滚角精度逐步下降。解决MEMS加速度计的输出受其误差的影响是提高对准中横滚角精度的关键问题。
对初始对准中横滚角精度受俯仰角影响的原因进行力学原理分析:在静止载体的任意姿态条件下,重力矢量在惯导系统的载体坐标系(本文采用X、Y、Z轴分别表示右、前、上的载体坐标系)中可分解为g· s in(θ)与g· c os(θ),其中g· s in(θ)即为载体坐标系Y轴上的加速度计所测量的重力加速度分量,如图 1所示。
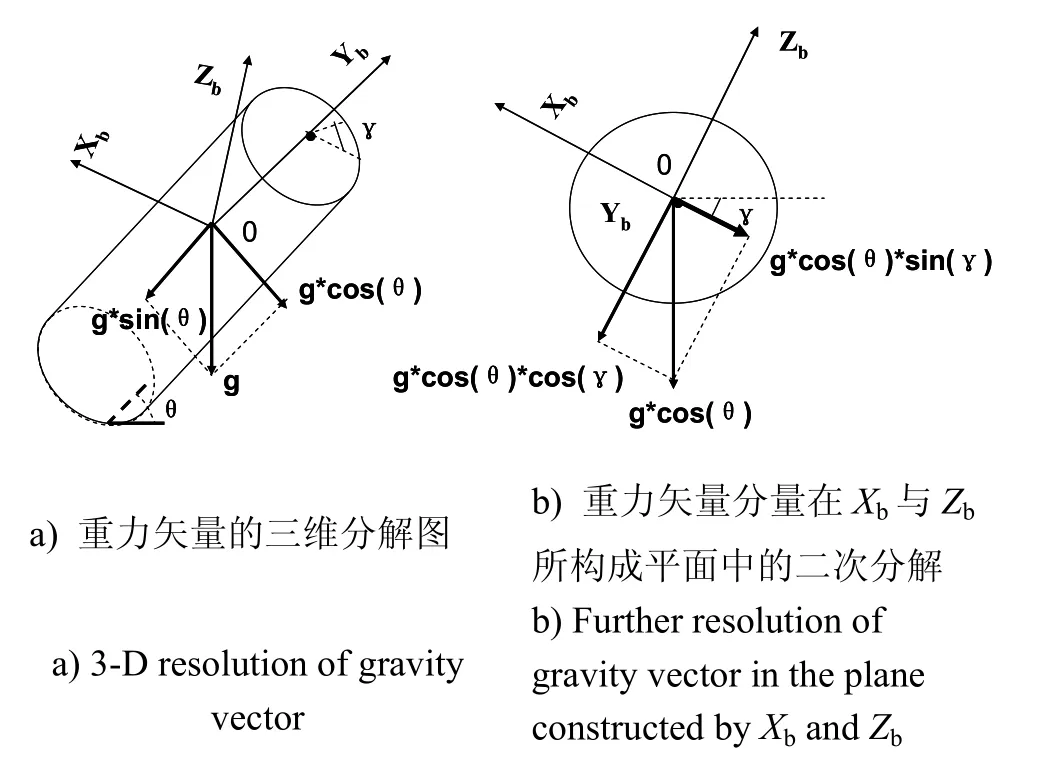
图1 静基座初始对准中重力矢量的分解图Fig.1 Resolution of gravity vector in static initial alignment
将g· cos(θ)再次投影到载体坐标系X轴与Z轴上,即可分别得到该两轴上加速度计的测量值g·co s (θ)·sin(γ)与g·co s (θ)·co s (γ),初始对准即通过这两个重力矢量的分量来的敏感载体的横滚角。由于这两个分量的绝对值将随着俯仰角的增大而减小,因而在大俯仰角的条件下受到加速度计噪声的影响较大。
对于MEMS惯导系统,其加速度传感器目前的精度一般处于毫g级别,在大俯仰角的条件下g·cos(θ)·sin(γ)与g·co s (θ)·co s (γ)受到器件误差的影响较石英挠性等类型的加速度计更为明显,即表 2中所示的情况。
2 基于加速度计余度配置MEMS捷联惯导系统结构设计
针对上述问题,可对惯导系统的结构采用余度配置方案。文献[3][4]提出了基于6个单轴MEMS陀螺仪与6个单轴MEMS加速度计的正十二面体余度配置方案,该方案对于惯性器件安装面的加工有特殊的要求,并且系统须完成特定的标定过程。
本文提出了一种在常规捷联惯导系统结构上进行3轴加速度计斜装余度配置的系统结构改进方法,即在常规的MEMS IMU结构(包含3个相互正交的陀螺仪和3个相互正交的加速度计)的基础上,增加3个斜装且相互正交的加速度计,其三轴分别定义为X’b、Y’b与Z’b,如图 2 所示,其中 MEMS IMU 与 3轴余度配置的加速度计已经过多位置法等方式进行标定,标定过程本文不再详述。
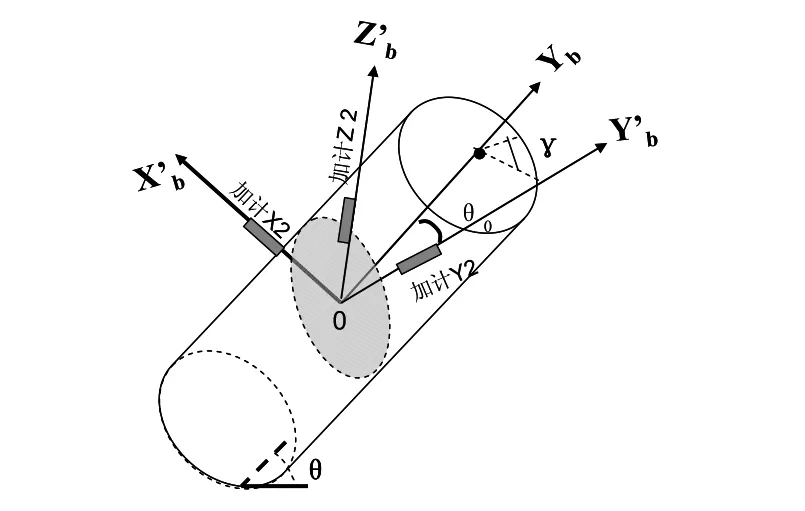
图2 惯导系统的加速度计余度配置示意图Fig.2 Accelerometer redundant configuration of inertial navigation system
该余度配置的结构中,斜装的X’b、Z’b轴处于与原系统结构中X轴与Z轴所构成的平面成0θ夹角的平面内,即图中以灰色表示的平面,Y’b轴垂直于该平面,因此Y’b与Yb之间的夹角为0θ。X’b、Y’b、Z’b之间构成右手直角坐标系。系统结构上的余度配置部分可视为3轴加速度计相对于常规IMU的整体斜装。在载体静止、横滚角为γ、俯仰角为θ的状态下,余度配置的三轴加速度计的理想输出为:

当系统在大俯仰角(如接近 90º)下启动时,的位置启动时,则 (θ-θ0)仍处于常规的俯仰角范围(若取θ0为45º,则(θ-θ0)接近 45º),即便采用 MEMS加速度计,的值也将远大于加速度计的噪声数量级。通过公式(4)即可初步获得载体的横滚角,再将该横滚角作为精对准的初始姿态角。

因此,利用该余度配置方案可有效提高惯导系统初始对准与导航定位的性能。
3 基于加速度计余度配置的初始对准改进方法
3.1 余度配置加速度计等效比力的计算
上节提出的基于加速度计余度配置的 MEMS捷联惯导系统,可实现全俯仰角范围(-90º~90º)内精确的初始对准,为了便于说明,本文中暂定义横滚角范围为-90º~90º,俯仰角与航向角的范围与常规的捷联惯导系统一致。根据图1中表示的载体坐标系下3轴加速度计度计的输出,以及公式(3)中余度配置的 3轴加速度计的输出,可通过三角函数关系得到将余度配置的加速度计输出投影到载体坐标系中的公式,如公式(5)所示:

由此可将余度配置的加速度计输出等效为载体坐标系下的加速度计输出。
3.2 自适应加权最小二乘加速度计数据融合
相关研究表明,两个互不相关的时间序列,其随机噪声满足白噪声特性,则两个时间序列加权平均值的误差均方根小于其中任意一个序列[5]。随机信号的该特性已被运用于惯性传感器的信号处理。本文通过自适应加权最小二乘算法,利用IMU中加速度计输出与余度配置加速度计输出进行数据融合,提高比力的零位偏置稳定性。自适应加权最小二乘基本原理及算法推导过程详见文献[5],由于篇幅限制本文将不再赘述。
3.3 初始对准改进方案
基于上述分析,提出一种基于加速度计斜装余度配置的MEMS惯导系统初始对准方案。对准流程如图3所示。
该方案与常规对准方案的步骤类似,分为粗对准与精对准两个步骤:
1)粗对准过程中通过常规IMU加速度计输出初步判断载体的俯仰角,若超过一定阈值(如 40º)则采用余度配置加速度计的输出求解横滚角,并根据IMU加速度计与余度加速度计输出的偏置稳定性确定加权最小二乘算法的初步权值,同时通过陀螺仪静态输出求解其常值零偏;
2) 精对准过程中根据余度配置加速度计输出计算其等效比力值,通过加权最小二乘算法进行数据融合,其权值根据实测比力的偏置稳定性在线调整,将融合后的比力与经常值零偏补偿后陀螺仪数据进行捷联惯性导航解算以及最优滤波估计,完成精对准;
在此特别说明,由于MEMS陀螺仪精度较低,且静态初始对准无法精确估计航向误差角,因此对准过程中的航向信息通过外观测方式获得。

图3 基于加速度计余度配置的初始对准改进方案Fig.3 Improved scheme of initial alignment based on accelerometer redundant configuration
4 实验验证与性能特点分析
4.1 余度配置MEMS惯导系统的对准性能验证
按本文第2节所示方法构建基于加速度计余度配置的MEMS惯性传感器结构,斜装角度0θ取为40º(为保证系统在完整的俯仰角定义域内的对准精度,0θ宜设置在40º~50º),并研制了基于DSP5416的导航计算机,在某型高精度位置速率转台上进行上述初始对准改进方法的试验验证。试验中载体俯仰角由转台控制由0º逐步增大到80º,间隔为10º。粗对准与精对准过程按如图3的所述时序进行。
实验中IMU的惯性传感器配置如表1所示,余度配置加速度计与IMU加速度计采用相同的型号。图4为载体俯仰角 80º条件下数据融合前后的比力值对比,其中深色曲线为经过融合的数据输出,浅色曲线为IMU中加速度计的输出。由于其他俯仰角条件下的数据融合结果类似,本文不再展开。
理论上,满足加权最小二乘条件的两个相同型号的传感器,数据融合后的均方差为传感器均方差的。由图 4可知,采用自适应加权最小二乘算法后,载体坐标系X轴与Y轴加速度计的零位偏置稳定性由2.0 mg左右降低到1.5 mg左右,Z轴加速度计的零位偏置稳定性由2.5 mg左右降低到2.0 mg左右,略大于理论计算值,但基本相当。
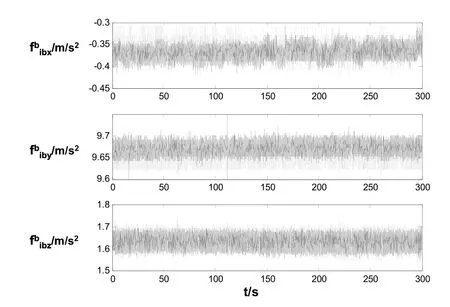
图4 数据融合前后加速度计输出对比Fig.4 Comparison of the output before and after data fusion
改进初始对准方法中俯仰角与横滚角精度的关系如表3所示,表中分别列出了采用加速度计数据融合后的对准精度,以及直接采用IMU加速度计进行对准后的精度。
对比表1与表3可知,载体俯仰角在40º以下时,常规对准方法与余度配置改进方法的横滚角精度相当,在俯仰角超过40º时,改进方法的横滚角误差较常规对准方法有显著提高;对比表3中采用加速度计数据融合前后的对准结果可知,相同俯仰角条件下,加速度计数据融合后的横滚角精度,相对于直接采用IMU加速度计有所提高,实验证明了提高惯性传感器的零偏稳定性可有效提高初始对准的精度。
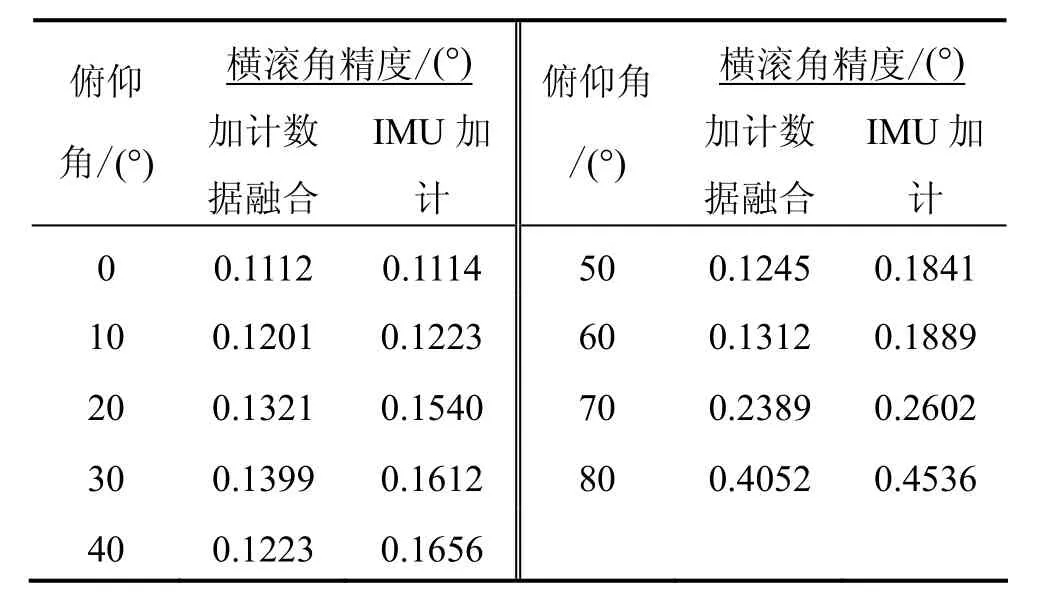
表3 初始对准改进方法中横滚角精度与俯仰角的关系Tab.3 Relationship between roll angle precision and pitch angle in improved initial alignment scheme
4.2 余度配置MEMS惯导系统性能特点分析
本文提出了一种基于 3轴加速度计斜装余度配置的捷联惯导系统,该系统具有如下性能特点:
1)相对于文献[6]与[7]所提出的基于正十二面体结构的余度配置MEMS惯导系统,本文所提出的系统结构是基于常规捷联惯导系统的改进结构,惯性传感器组件的选型、装配与标定过程也更接近常规的捷联惯导系统,更适合于二维弹道修正弹药、微型飞行器等应用环境;
2) 本文所提出系统结构在大俯仰角下的对准精度主要取决于以下几个方面:①惯导系统误差模型的准确性;②最优滤波器的选择;③惯性器件误差特性及其标定精度;④斜装加速度计的安装面加工精度。
3) 对于捷联惯性导航系统结构,本文提出的改进方案可视为由两组相互独立的3轴正交加速度计组件,以及一组3轴正交陀螺仪组件构成,两组加速度计组件可与陀螺仪组件分别构成两套完整的IMU(其中一套可视为加速度计斜装惯导系统[8]),可通过故障诊断与隔离功能算法提高系统的性能与可靠性。
5 结 论
本文以MEMS惯性导航系统为研究背景,研究了一种基于三轴加速度计斜装余度配置的惯导系统结构,以及在载体大俯仰角条件下精确估计其横滚角的初始对准方法。论文分析了常规对准方法在大俯仰角条件下无法精确估计横滚角的物理本质,针对该问题提出了加速度计余度配置改进方案,并论证了改进方案在提高横滚角估计精度上的有效性。高精度转台上的实验验证表明,对于大俯仰角下启动的MEMS捷联惯性导航系统,本文所提出的余度配置方案可有效提高横滚角估计精度以及加速度计零偏稳定性,并使系统具有故障诊断与隔离的功能,对MEMS惯性导航系统在弹载环境中的工程应用具有较为重要的参考价值。
(References):
[1] Seong Yun Cho, Chan Gook Park. Calibration of a redundant IMU[C]// AIAA Guidance, navigation, and Control Conference and Exhibit, 2004: 5114-5123.
[2] Park S, Tan C W, Park J. A scheme for improving the performance of a gyroscope-free inertial measurement unit[J]. Sensors and Actuators A: Physical, 2005, 121:410-420.
[3] Jamshaid A, Fang Jiancheng. In-flight Alignment of inertial navigation system by celestial observation technique[J]. Transactions of Nanjing University of Aeronautics & Astronautics, 2005, 22(2): 132-138.
[4] Ishibashi S, Tsukioka S, Yoshida H, et al. Accuracy improvement of an inertial navigation system brought about by the rotational motion[R]. Japan Agency for Marine- Earth Sci & Technol. (JAMSTEC), Yokosuka,2007: 1-5.
[5] 杨叔子,吴雅,轩建平,等. 时间序列分析的工程应用[M]. 武汉:华中科技大学,2007.YANG Shu-zi, WU Ya, XUAN Jian-ping, et al. The engineering application of time series analysis[M].Wuhan: Huazhong University of Science and Technology,2007.
[6] HUA Bing, LIU Jian-ye, LI Rong-bing, et al. A study on turning calibration technology of MEMS-SINS with redundant configurationp[J]. Journal of Astronautic, 2009,30(2): 468-473.
[7] 芦佳振,张春熹,祝露峰. 余度捷联惯导系统连续自动标定技术[J]. 北京航空航天大学学报,2009,35(3):366-370.LU Jia-zhen, ZHANG Chun-xi, ZHU Lu-fen. Technique of continuous auto-calibration of redundant strapdown inertial system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(3): 366-370.
[8] 华冰,刘建业,孙永荣. 弹道导弹IMU斜装余度配置设计的系统性能分析[J]. 兵工学报,2007,28(10):1209-1213.HUA Bing, LIU Jian-ye, SUN Yong-rong, Performance analysis in a ballistic missile IMU system with skewed redundant configuration[J]. Acta Armamentarii, 2007,28(10): 1209-1213.
猜你喜欢
科技与创新(2021年2期)2021-01-29
西北工业大学学报(2018年4期)2018-09-07
汽车技术(2018年1期)2018-02-05
舰船科学技术(2017年11期)2017-11-27
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
山东工业技术(2016年23期)2016-12-23
科技视界(2016年17期)2016-07-15
通信电源技术(2016年5期)2016-03-22
火控雷达技术(2016年1期)2016-02-06