地磁信息感应装定系统及其插值算法
2011-04-30 04:14刘建敬丁立波
中国惯性技术学报 2011年6期
刘建敬,张 合,丁立波,陈 丽
(1. 南京理工大学 智能弹药技术国防重点学科实验室,南京 210094;2. 宜昌测试技术研究所,宜昌 443003)
地磁场是天然存在的物理参考场,为载体的姿态检测提供很好的参考基准,因此基于地磁场的弹体姿态角检测技术日益得到重视和研究,为常规弹药简易制导技术开辟了新的发展方向[1-4]。美国的阿连特技术公司设计的滚转角测试系统,就是通过安装在弹体上的磁传感器对地磁场进行探测,从而实现弹体滚转角的测量[5]。
实现基于地磁场的弹体姿态角检测技术,其前提是获取所在地的地磁场矢量信息,方法有两种:一是利用GPS提供弹丸飞行的实时空间位置,以此计算弹丸所处空间位置的地磁场矢量;二是认为在弹药的射程范围内,地磁场矢量恒定不变,发射地点的地磁场矢量就是姿态检测系统需要的地磁场信息。但是目前GPS在常规弹药上的应用仍然存在一些问题,比如首次定位时间长、飞行速度限制和动态定位精度低等,相比而言,方法二的可行性更好。因此,基于地磁场的弹体姿态角检测系统就需要地磁信息感应装定系统辅助,为其提供地磁场信息。
根据地磁信息感应装定系统的工作原理,设计了基于 GPS和 ARM 微处理器的地磁信息感应装定系统,结合地磁场分布特点,利用地磁场的线性周期样条组合插值算法计算地磁场矢量,并通过非接触电磁感应方式,向弹体姿态角检测系统提供准确的地磁场信息。
1 地磁信息感应装定系统
地磁信息感应装定系统利用事先建立的全球或者区域地磁场信息库(即地磁图),根据弹药发射地点的经纬度信息,采用相关的插值算法计算出当地的地磁场矢量,然后通过某种方式将其发送给弹载的姿态角检测系统。
地磁信息感应装定系统由6部分组成,包括GPS模块1、键盘模块2、显示器模块3、ARM微处理器模块4、存储器模块5、和驱动器模块6组成,如图1所示。GPS模块1采用高精度的GPS接收机,其水平位置定位精度达到2.5 m,数据更新频率为5 Hz,实时将发射地点的位置信息发送给ARM微处理器模块5;ARM微处理器模块5是地磁信息感应装定系统的控制中心,采用ST公司32位的Cortex M3系列微处理器,它接收GPS的位置信息,读取存储器模块5的插值系数,然后根据插值算法计算地磁场矢量,同时根据键盘模块2输入的命令,将地磁场矢量发送给驱动器6,并在显示器模块3上显示发送的状态;驱动器6采用电磁感应装定技术,通过非接触方式向弹体姿态角检测系统传输能量和地磁场数据[6],并且将向ARM微处理器模块4反馈装定的结果。

图1 地磁信息感应装定系统Fig.1 Geomagnetic information induction setting system
2 地磁信息感应装定系统的插值算法
目前,地磁场的插值算法很多,有径向基函数法、泛克里金插值法和 BP神经网络等[7-9],但是这些方法比较复杂,计算任务量大,并且建立的地磁图需要很大的存储空间。本文根据地磁场强度沿经线方向变化较快,沿纬线方向变化较慢[10-11]的特点,以经度和纬度为参量,采用线性周期样条组合插值算法(即在纬线方向上采用线性插值,在经线方向上采用三次周期样条插值),快速准确地计算弹药发射地点的地磁场矢量。
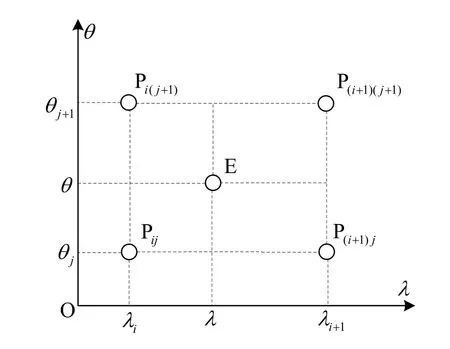
图2 地磁场插值示意图Fig.2 Schematic of geomagnetic field interpolation

那么,弹药发射地点E的地磁场强度的组合插值函数:

式(4)即为该区域的线性周期样条组合插值函数的标准形式,式中的系数可由aij、bij、cij、表示。由式(4)可知,已知8个系数,线性周期样条组合插值算法仅需7次加法和7次乘法,便能够计算出地磁场的一个特征量。根据地磁场特征量之间的关系,只需要插值计算出三个主要特征量(即北向分量X、东向分量Y、竖直分量Z),其他特征量(即水平分量H、总强度F、磁偏角D和磁倾角I)均可由这三个分量计算得到。
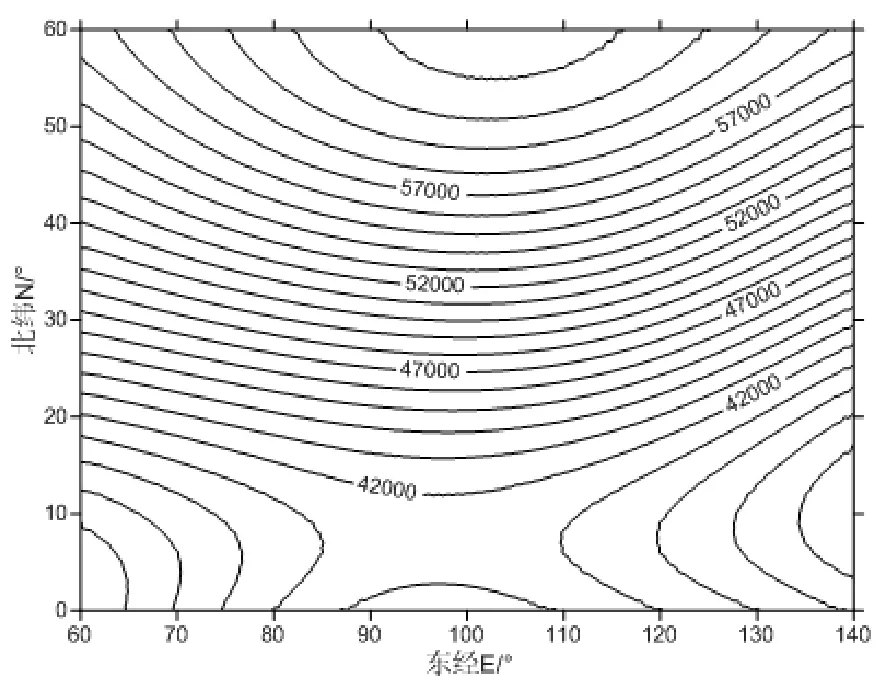
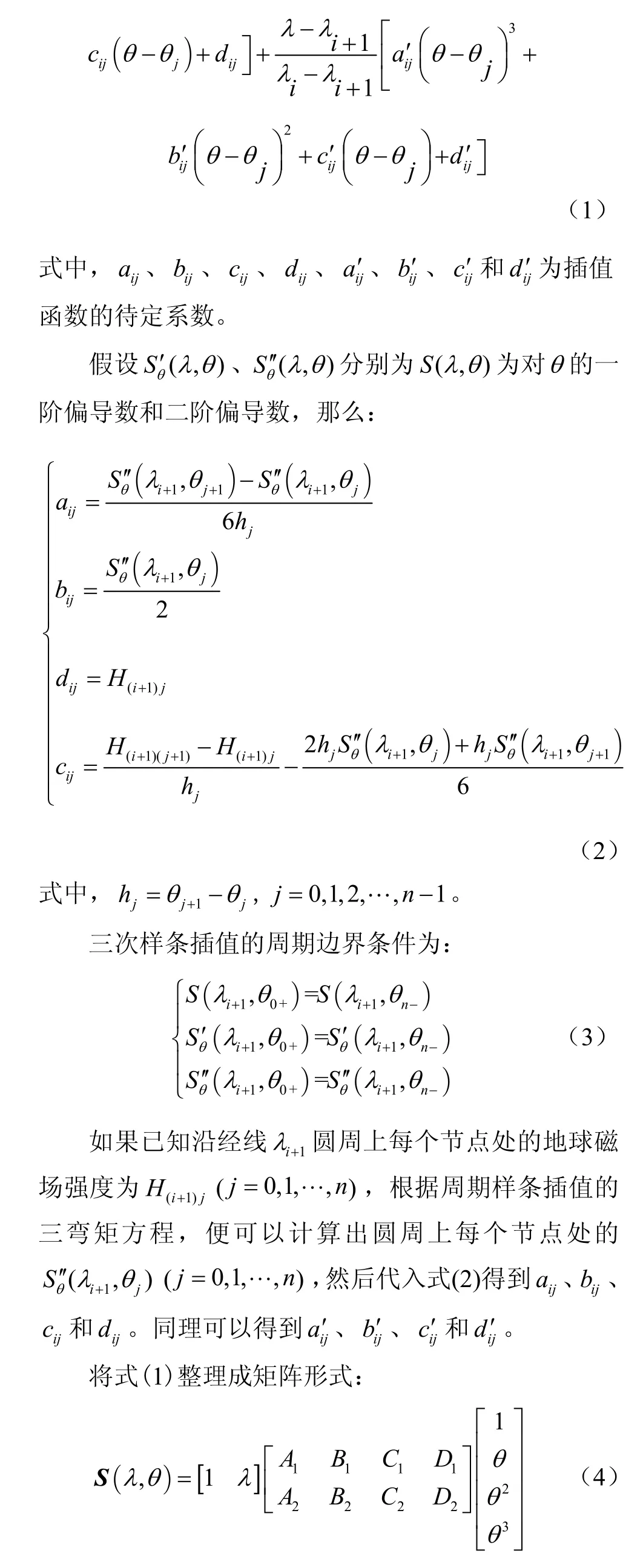
图3 地磁场总强度FFig.3 Total intensity F of geomagnetic field
3 地磁信息感应装定系统的插值分析
以世界地磁场模型WMM2010为依据,分别沿经线方向和纬线方向以2º为步长,建立包括中国在内的区域(N0º~N60º,E60º~E140º)的地磁图,图 3 所示为该区域内地磁场总强度F的等值线图。
以区域内地磁场总强度变化最强烈的矩形区域(N36º~N38º,E136º~E138º)为对象,利用 WMM2010分别计算E136º和E138º经线所在的两个圆周上每个2º处地磁场数据,计算矩形区域的地磁场的X、Y、Z三个特征量的线性周期样条组合插值系数,如表1所示。

表1 线性样条组合插值系数Tab.1 Coefficients of linear spline combination interpolation
将该矩形区域沿经纬度划分为50×50的网格,以WMM2010计算的地磁场数据为理论值,计算线性周期样条组合插值误差,并且,根据X、Y和Z计算地磁场的其他特征量,对插值效果进行分析,如表 2所示。

表2 地磁场插值误差Tab.2 Interpolation errors of geomagnetic field
由表2可知,X、Y和Z分量线性周期样条组合插值的相对误差分别小于0.0044%、0.1260%和0.0035%,由其计算出的H和F分量的相对误差小于0.01%,D和I分量的角度误差小于0.01º,说明地磁场的线性周期样条组合插值具有很高的精度。
4 实 验
将地磁信息感应装定系统放置于室外,上电之后,等待GPS接收数据直至能够定位,然后查看所在地的地理位置信息和线性周期样条组合插值计算到的地磁场X、Y和Z分量信息。
图4所示为地磁信息感应装定系统根据GPS的地理位置数据计算到的地磁场的X、Y和Z分量,其结果与仿真计算结果相同。由此表明,地磁信息感应装定系统利用线性周期样条组合插值算法能够准确地计算出地磁场矢量。
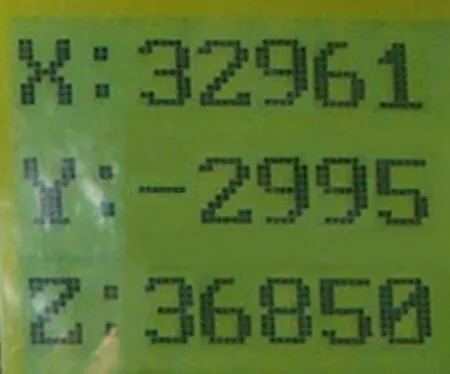
图4 X、Y和Z分量Fig.4 Component of X,Y and Z
5 结 论
实现基于地磁场的弹体姿态角检测技术的前提是获取发射地点的地磁场信息。本文根据地磁信息感应装定系统的工作原理,设计了基于GPS和ARM微处理器的地磁信息感应装定系统,通过非接触电磁感应方式向弹体姿态角检测系统传输信息,并结合地磁场沿经线变化快和沿纬线变化慢的特点,利用线性周期样条组合插值算法计算地磁场矢量。插值结果表明,地磁信息感应装定系统计算的地磁场H和F分量误差小于0.01%,D和I分量误差小于0.01º,能够快速准确地提供地磁场信息。
(References):
[1] Markley F L. Kalman filter for spinning spacecrafe attitude estimation[J]. Journal of guidance control and dynamics, 2008, 31(6): 1750-11760.
[2] Včelák J, Kubík J. Influence of sensor imperfections to electronic compass attitude accuracy[J]. Sensors and Actuators A: Physical, 2009, 15(2): 233-240.
[3] 高峰,张合. 基于基准角和补偿角的常规弹药滚转角磁探测算法研究[J]. 探测与控制学报,2008,30(5):11-15.GAO Feng, ZHANG He. Algorithm of roll angle determination of conventional ammuitions based on benchmark angle and compensation angle[J]. Journal of Detection & Control, 2008, 30(5): 11-15.
[4] Wilson M J. Attitude determination with magnetometers for gun-launched munitions[R]. Army Research Laboratatry, 2004.
[5] Johnson L H, Kurschner D L. Roll orientation using turns-counting fuze[P]. US: 1813905, 2007-08-01.
[6] 马少杰,张合,李长生,石磊. 小口径火炮引信弹链电磁感应装定仿真分析[J]. 兵工学报,2009,30(4):419-424.MA Shao-jie, ZHANG He, LI Chang-sheng, SHI Lei.Simulation and analysis of fuze link-belt electromagnetic induction setting in small caliber artillery[J]. Acta Armamentarii, 2009, 30(4): 419-424.
[7] 黄学功,房建成,刘刚,蒋颜玮. 地磁图制备方法及其有效性评估[J]. 北京航空航天大学学报,2009,35(7):891-894.HUANG Xue-gong, FANG Jian-cheng, LIU gang, et al.Geomagnetic mapping and validity estimation[J]. Journal of Beijing University of Aeronautics and Astronautics.2009, 35(7): 891-894.
[8] 杨功流,张桂敏,李士心. 泛克里金插值法在地磁图中的应用[J]. 中国惯性技术学报,2008,16(2):162-166.YANG Gong-liu, ZHANG Gui-min, LI Shi-xin..Application of universal Kriging interpolation in geomagnetic map[J]. Journal of Chinese Inertial Technology, 2008, 16(2): 162-166.
[9] 乔玉坤,王仕成,张金生,等. 基于BP网络的地磁基准图制备及其精度评价[J]. 中国惯性技术学报,2009,17(1):53-58.QIAO Yu-kun, WANG Shi-cheng, ZHANG Jin-sheng, et al. BP neural network based preparation method of geomagnetic reference map and its accuracy evaluation[J].Journal of Chinese Inertial Technology, 2009, 17(1): 53-58.
[10] Maus S, Macmillan S, Mclean S, et al. The US/UK world magnetic model for 2010-2015[R]. NOAA Technical Report NESDIS/NGDC, 2010.
[11] Macmillan S. Earth’s magnetic field[EB/OL]. [2006-10-11].http://www.eolss.net/ebooks/Sample%20Chapters/C01/E6-16-04-01.pdf. 2006.
猜你喜欢
导航定位学报(2022年3期)2022-06-10
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
图学学报(2020年5期)2020-11-13
新生代(2018年16期)2018-10-21
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年2期)2017-11-24
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
现代防御技术(2016年1期)2016-06-01