基于光照区太阳敏感器和陀螺辅助修正的微小卫星磁测技术
2011-04-30 04:14华冰,郁丰
中国惯性技术学报 2011年6期
华 冰,郁 丰
(南京航空航天大学 高新技术研究院,南京 210016)
某低功耗微小卫星采用磁强计、太阳敏感器、陀螺、动量轮、磁力矩器组成姿态测量与控制系统。微小卫星的控制系统采用常速动量轮实现惯性定向,所以控制系统的一个重要工作就是控制卫星的俯仰姿态,此时可用磁强计估计卫星的俯仰姿态与俯仰姿态变化率。太阳敏感器在光照区获取太阳方位信息,结合太阳历获取卫星的姿态,太阳敏感器结合磁强计,可以进行滤波计算出卫星俯仰姿态。陀螺虽然精度高,但功耗较大,因此只在俯仰方向单轴配置,阶段性开机监测卫星俯仰角速率,配合俯仰控制任务的执行。卫星的剩磁干扰是星上磁强计的主要误差来源,一般采用发射前的剩磁测量与补偿的方法对剩磁量加以控制,但该方法作用有限,经过磁补以后的剩磁量一般还有900 nT左右,对姿态测量将产生较大的误差。
本文首先研究了俯仰方向卫星测量误差模型,然后分析了磁强计为观测量的俯仰滤波器和以太阳敏感器陀螺为观测量的俯仰滤波器两种估计方法。在此基础上推导了磁强计误差估计算法,在光照区以太阳敏感器与陀螺输出作为俯仰滤波器观测量,估计出卫星俯仰角度和角速度。再采用最小二乘方法,利用滤波输出量对磁强计误差进行估计,估计的结果进入滤波器对磁场输出进行测量修正。仿真表明该方法简单易行,有效提高了微小卫星导航系统性能。
1 卫星姿态估计模型分析
1.1 磁强计误差模型
剩磁是星上磁强计的主要误差来源,剩磁造成的磁强计误差虽然是时变的,但是短期内可以近似认为是常值,反映在误差项上即为星上磁强计零偏误差,即有下式:

式中,b为磁强计真值,b~为磁强计测量值,bε为磁强计零偏误差,σ为磁强计随机量测噪声。
1.2 采用磁强计输出信息为量测量的俯仰滤波器
卫星的测量信息估计方法采用俯仰滤波器。卫星在俯仰Y轴方向上的姿态动力学与X、Z轴解耦,则有:

式中,θ是卫星相对于轨道的Y向姿态角,Ny为作
用在Y轴上的控制力矩,Iyy为Y轴方向的转动惯量。状态方程:

式中,Δt为星载计算机滤波步长,k表示时刻,其中,bi为测量的地磁,bio为轨道参考系下的地磁,i=x,y,z。
2 太阳敏感器和陀螺辅助的磁强计误差估计
2.1 磁强计零偏误差分析

2.2 采用太阳敏感器和陀螺信息的磁强计误差估计
由于磁强计的输出耦合了剩磁造成的常值零偏,俯仰滤波器中的姿态估算存在较大误差。在光照区间太阳敏感器可用,陀螺也可短期开机,因此可以选择精度较高的太阳敏感器和陀螺估计出姿态信息。
利用太阳敏感器信息计算的俯仰角为:
式中,ir为测量的太阳分量,rio为轨道参考系下的太阳分量。
Y方向陀螺输出与俯仰角速度的关系为:

式中,yω为陀螺输出,ε为陀螺输出误差(含轨道角速率)。
综合式(9)与(10),忽略误差项的影响,k时刻俯仰角估计值为:

式中,θ(k)为k时刻俯仰角估计值,θs(k)为k时刻太阳敏感器计算出的俯仰角信息,(k)为k时刻俯仰角速度信息,Δ为k-1到k时刻采样步长。
在光照区,利用式(8),其中俯仰角计算采用(11)式估计值,轨道系磁场强度通过轨道信息查表求得,则可以估计出磁强计误差E。由于此时估计的角度和角速度信息与剩磁误差不相关。因此计算出的俯仰角和俯仰角速度不仅可以用于姿态控制,也可以作为辅助信息进入滤波器对磁场输出进行测量修正。如图 1所示。
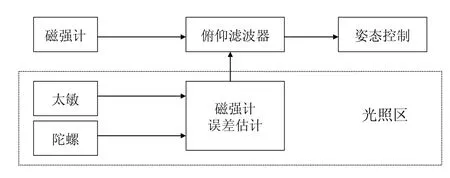
图1 光照区磁强计误差修正示意图Fig.1 Magnetometer error correction using sun sensor
3 仿真验证
卫星轨道为 10∶30 AM 太阳同步轨道, 高度500 km。磁强计量测噪声均方差60 nT ,输出频率10 Hz。设置卫星的剩余磁矩为[ 0.3 0.3 0.3] A·m2,为更进一步模拟磁场误差,假设剩磁造成的磁强计零偏误差为 900 nT。卫星转动惯量为 diag[ 0.8 0.8 0.8]kg·m2,姿态控制系统使卫星保持对地稳定,并加入了剩磁扰动力矩,其余干扰力矩假设为白噪声,均方差为5×10-7N·m。太阳敏感器视场范围±30°×±30°,测量精度优于 0.5°(3σ),陀螺的测量精度约为 0.003(°)/s。
每次进入光照区开始数据采集,同时进行实时估计,估计出的误差在滤波器中用于量测修正。经过两个轨道周期后的数据采集,X轴磁强计零偏误差结果为945 nT,Y轴磁强计零偏误差估计结果为813 nT,随着光照区测量数据的不断增加,误差估计结果也越来越精确稳定。图2为修正情况下卫星从阻尼到稳定的三轴姿态角,可以看到稳态姿态角曲线较为平缓。
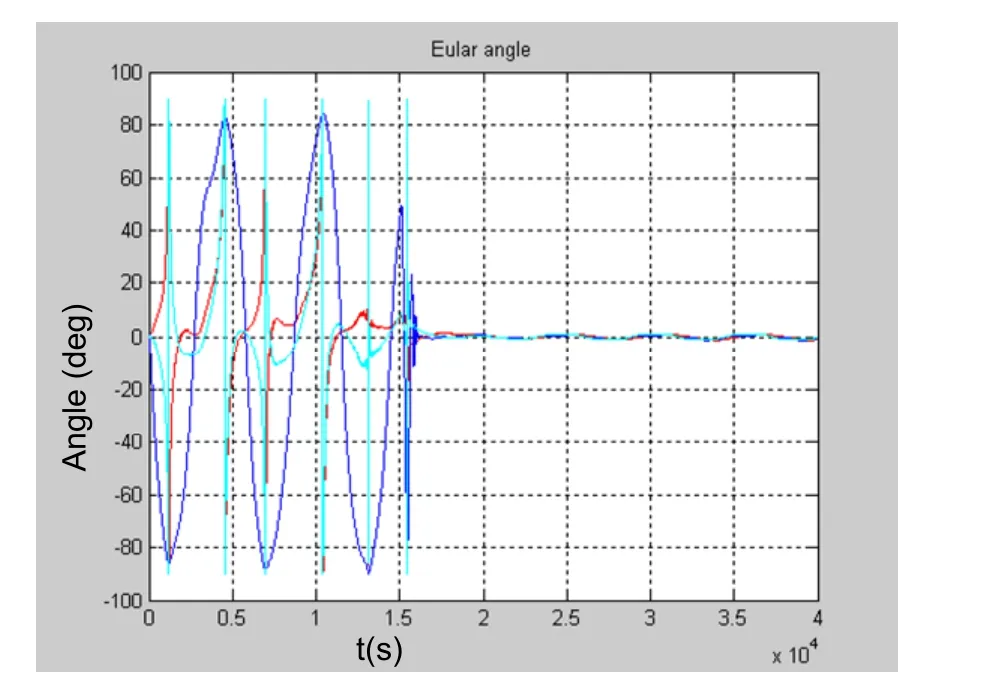
图2 卫星三轴姿态角(磁场误差修正)Fig.2 Satellite attitudes(with magnetometer error correction)
将磁场误差不修正与磁场误差实时修正两种情况下的俯仰角和俯仰角速度局部放大,如图3、4所示,图中①表示磁场误差不修正,②表示磁场误差修正。可以看到修正后的角度误差相比修正前有明显改善,姿态角精度提高了 1°左右,角速度精度最高提高了0.003 (°)/s,整体波动更为平缓。
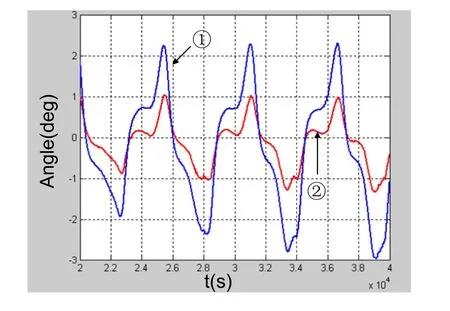
图3 俯仰角对比Fig.3 Comparison of pitch angles

图4 俯仰角速度对比Fig.4 Comparison of pitch angle rates
4 结 论
针对微小卫星磁测存在的剩磁干扰误差,提出了在光照区以太阳敏感器与陀螺输出作为俯仰滤波器观测量,估计出卫星俯仰角度和角速度。再采用最小二乘方法,利用滤波输出量对磁强计误差进行估计,估计的结果进入滤波器对磁场输出进行测量修正。仿真表明该方法简单易行,姿态角精度提高了1°左右,角速度精度最高提高了0.003 (°)/s左右,并增强了卫星稳定性,有利于成像等任务的完成,有效提高了微小卫星导航系统性能。
(References):
[1] Crassidis J L, Lai K L, Harman R R. Real-time attitude-independent three-axis magnetometer calibration[J]. Journal of Guidance, Control, and Dynamics, 2005,28(1): 115-120.
[2] 谢祥华,张锐,张静. 基于磁强计与太阳敏感器的卫星自主定轨算法[J]. 宇航学报,2009,30(3):919-923.XIE Xiang-hua, ZHANG Rui, ZHANG Jing. Satellite autonomous orbit determination based on magnetometers and sun sensors[J]. Journal of Astronautics, 2009, 30(3):919-923.
[3] 郁丰,刘建业,熊智. 微小卫星剩磁在轨标定技术研究[J] . 航空学报,2007,28(5):1142-1145.YU Feng, LIU Jian-ye, XIONG Zhi. Research on remanence on-orbit calibration for micro-satellites[J].Journal of Aeronautics, 2007, 28(5): 1142-1145.
[4] 黄琳,荆武兴. 卫星姿态确定与三轴磁强计校正[J] . 宇航学报,2008,29(3):845-859.HUANG Lin, JING Wu-xing. Spacecraft attitude determination and three axis magnetometer calibration[J].Journal of Astronautics, 2008, 29(3): 845-859.
[5] Mimasu Y, Miyata K, Narumi T, et al. Attitude determination and control system for QSAT[C]//Proceedings of the 17th Workshop on Astrodynamics and Flight Mechanics. ISAS/JAXA, July 23-24, 2007: 30-34.
[6] Appel P. Attitude estimation from magnetometer and earth-albedo-corrected coarse sun sensor measurements[J].Acta Astronautica, 2005, 56(1-2): 115-126.
[7] Roh K M, Park S Y, Choi K H. Orbit determination using the geomagnetic field measurement via the unscented Kalman filter[J]. Journal of Spacecraft and Rockets, 2007,44(1): 246-253.
猜你喜欢
电源技术(2022年12期)2023-01-07
防爆电机(2021年5期)2021-11-04
小学生学习指导(低年级)(2019年10期)2019-10-16
电子制作(2019年11期)2019-07-04
学生天地(2019年6期)2019-03-07
中国人民警察大学学报(2018年12期)2019-01-17
军事文摘(2018年24期)2018-12-26
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
快乐语文(2018年36期)2018-03-12