激光陀螺POS惯性数据滤波及时延补偿
2011-04-30 04:13钟麦英闫东坤
中国惯性技术学报 2011年6期
钟麦英,闫东坤
(北京航空航天大学 惯性技术国家重点实验室,新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191)
高分辨率对地观测是我国中长期科技发展规划的重大专项之一,包括卫星遥感系统和航空遥感系统。航空遥感系统以飞机为观测平台,利用观测载荷获取地球表面高精度遥感数据,是高分辨率对地观测的最有效手段[1]。航空遥感要求飞行器做理想匀速直线飞行,但由于外界扰动的影响,飞行器实际运动将偏离理想运动,从而导致遥感成像像质退化、分辨率下降。所以,要实现高分辨率运动成像,必须精确测量遥感载荷的运动误差并进行补偿。位置姿态系统(Position and Orientation System,POS)可以为遥感载荷提供高精度位置姿态信息。因此,基于POS的运动误差高精度测量是各类遥感载荷实现高分辨率成像的共性关键技术。国际上从20世纪90年代初开始研究机载POS,目前已基本形成成熟产品,广泛应用于航空相机、激光雷达以及机载合成孔径雷达(Synthetic Aperture Radar, SAR)等航空遥感载荷[2]。加拿大APPLANIX公司的POS/AV510和POS/AV610代表着国际POS产品的发展水平。国内在POS技术方面起步较晚,并受到国外技术封锁,为满足航空遥感系统对高精度POS的迫切需求,实验室开展了高精度激光陀螺POS的研制。国内机载干涉SAR是解决对传统航空摄影测量困难地区1∶50000或更大比例尺测绘的重要手段[3]。机载干涉SAR运动补偿用POS的位置、姿态精度直接影响SAR的成像质量[4]。
二频机抖激光陀螺和石英挠性加速度计是激光陀螺POS的惯性敏感器。因为激光陀螺机械抖动偏频,导致陀螺和加速度计信号包含抖动噪声,使得数据不可直接使用,必须对数据进行滤波,以滤除抖动噪声,保留有效信息。对陀螺和加速度计数据进行滤波必然引起信号的时延[5-6],使 POS数据时间与遥感载荷运动时间不同步,POS精度下降,从而导致POS对遥感载荷运动误差补偿精度下降,成为影响激光陀螺POS对载荷运动误差补偿精度的重要因素之一。本文通过激光陀螺POS与干涉SAR联合应用,研究激光陀螺POS信号滤波及时间延迟补偿方法。
传统激光陀螺惯导系统主要应用于载体的实时导航、定位,对激光陀螺和加速度计数据的预处理实时性要求较高[7],而滤波器的时延与滤波效果是对立的,因而滤波效果有所降低,导致惯导数据有较大波动,并且惯导与载机之间通过减振器相连,从而对载机微小震动不敏感,而且惯导数据输出频率较低(通常低于100 Hz),对高频振动不敏感;与之相比,激光陀螺POS数据主要用于航空遥感载荷的运动误差测量,数据可以进行事后处理,并且为测量遥感载荷的微小运动误差,必须使IMU与载荷固连,并加强滤波器高频滤波效果,滤除陀螺抖动噪声,使输出数据真实描述载荷微小震动,而且POS数据频率较高,达到100~200 Hz甚至更高,可以捕获更高频率的载荷振动信息,以实现更高精度运动误差补偿,因此传统激光陀螺惯导无法应用于干涉SAR的运动误差补偿。
目前工程上应用的滤波器主要有无限冲击响应(Infinite Impulse Response,IIR)滤波器和有限冲击响应(Finite Impulse Response,FIR)滤波器。其中IIR滤波器相位非线性,导致不同频率分量通过滤波器后时间差产生变化,无法进行准确时延补偿,所以无法在激光陀螺POS中应用;FIR滤波器具有严格的线性相位,群延迟固定,且采用非递归结构,系统稳定,可以通过对数据时间补偿一个恒定值的方法实现数据延迟的准确补偿,所以激光陀螺POS采用FIR滤波器实现陀螺和加速度计抖动解调。
本文针对激光陀螺机械抖动偏频和滤波器引起信号时延的问题,采用离散数字信号处理的方法,设计适合于激光陀螺POS的数据预处理滤波器,实现激光陀螺和加速度计信号抖动滤除;提出一种激光陀螺POS数据时延补偿方法,使POS数据时间与载荷运动发生时间严格同步,提高激光陀螺POS位置、姿态精度,并通过与干涉SAR飞行实验进行验证。
1 激光陀螺IMU惯性信号分析
POS由惯性测量单元(Inertial Measurement Unit,IMU)、导航计算机、全球定位系统(Global Position System,GPS)和数据后处理软件组成,如图1所示。

图1 激光陀螺POS组成框图Fig.1 Block diagram of RLG POS
IMU作为载体运动信息的敏感单元,测量载体角速度信息和线加速度信息,经过预处理后发送给导航计算机,其直接决定了POS的精度。激光陀螺仪和石英加速度计是IMU的核心敏感器件。其中,激光陀螺作为角速度敏感元件,是一类基于Sagnac效应的角运动惯性敏感器件[8],但机械抖动偏频使陀螺的输出不仅包含了惯性输入角速率信息iΩ,如式(1)所示:

式中,iiΩ为惯性输入角速率幅值,inω为惯性输入角速率频率,inφ为信号相位,n为采样序列。
陀螺输出数据还包含了抖动偏频的角速率信息dΩ,如式(2)所示:

式中,ΩdM为抖动最大转速,ωdin为抖动频率,φdin为信号相位,n为采样序列。
陀螺输出数据由两部分组成,抖动偏频噪声和惯性输入信息,如式(3)所示:

因此必须对陀螺输出数据进行滤波以滤除陀螺偏频抖动噪声。同时,加速度计与陀螺安装在同一个结构体上,陀螺的机械抖动导致加速度计信号中同样包含抖动噪声,影响加速度计信号质量,需要对加速度计数据进行滤波。
陀螺和加速度计敏感角速度信息和线加速度信息,但是因为陀螺抖动偏频的原因,导致陀螺和加速度计数据包含抖动噪声,淹没了有效惯性输入信号,因此必须对陀螺和加速度计数据滤波,滤除抖动偏频噪声[9]。与传统惯导相比,激光陀螺IMU与载机之间直接固连,为测量载机的微小运动,要求陀螺抖动噪声更小,数据更加平滑,因而要求IMU输出的陀螺和加速度计数据中抖动偏频噪声较惯性输入量低 20 dB,即一个数量级以上。数据通过滤波器后,必然引起延迟,本文对陀螺和加速度计数据通过FIR滤波器进行滤波,在滤波的同时必然导致陀螺和加速度计数据的群延迟,从而使IMU输出信号较载体运动发生延后,相比于传统惯导数据实时应用而无法进行时延补偿的特点,POS数据可以进行后处理,所以必须对数据进行时延补偿,以提高POS精度,从而提高对航空遥感载荷的运动补偿精度。
2 基于FIR的IMU数据处理
2.1 滤波器设计
激光陀螺POS中陀螺机械抖动频率在300 Hz以上,载机的抖动频率在50 Hz以内,二者处于不同频带,因此可以通过FIR数字低通滤波器滤除激光陀螺和加速度计抖动信号[10]。
本文以激光陀螺信号为例,设计激光陀螺POS用滤波器。将如式(3)所示激光陀螺信号,输入FIR数字滤波器,推导其稳态响应表达式,设系统频率响应函数为H(ejω)。利用三角恒等式,将激光陀螺信号Ω[n]表示为两个复指数序列之和的形式,即

同样,输入g*[n]的输出v*[n]是v[n]的复共轭,如式(7)所示:

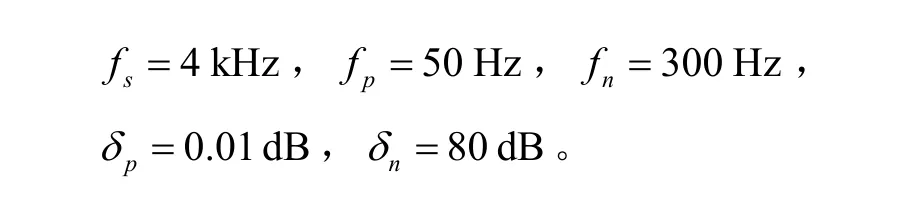
静态情况下陀螺抖动信号功率谱高出低频功率谱60 dB,为保证通带内数据无失真通过,将通带最大衰减设置为0.01 dB,为保证输出数据平滑,将阻带最小衰减设置为80 dB,使陀螺抖动噪声较惯性输入信号幅度低20 dB以上,据此使用Matlab中的FDATool工具设计具有如下技术指标的FIR数字低通滤波器:
得65阶线性相位FIR数字低通滤波器,如式(10)所示,该FIR滤波器幅频特性响应、相频特性响应和群延迟如图2所示。

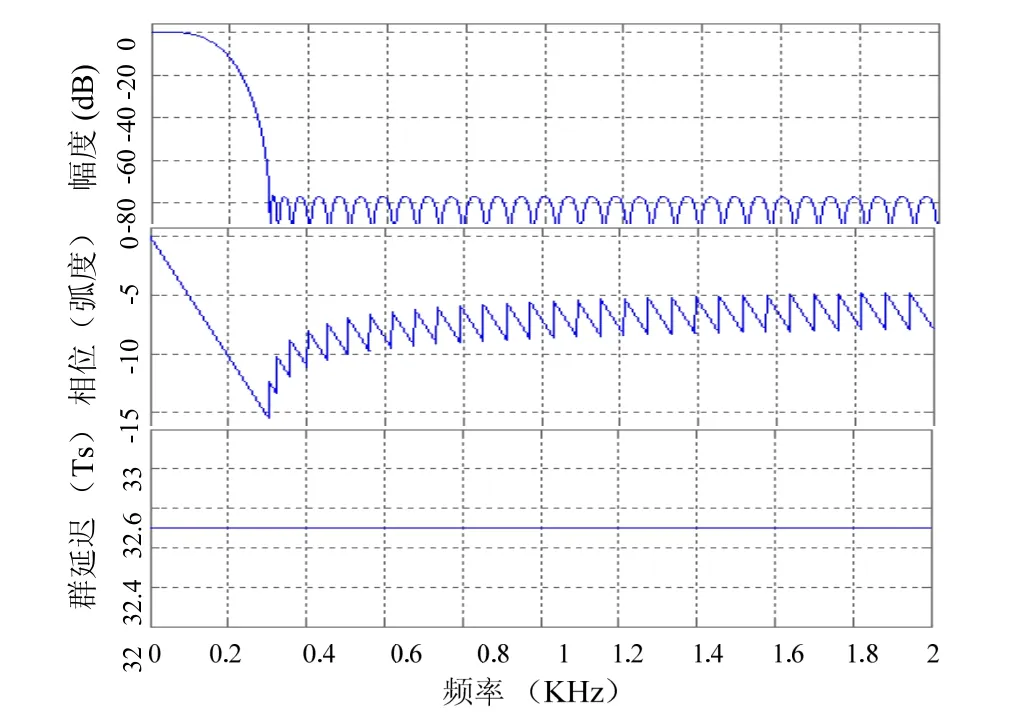
图2 FIR滤波器幅频、相频、群延迟曲线Fig.2 Magnitude, phase and group delay curve of FIR filter
2.2 滤波器时延补偿
2.2.1 数字滤波器时延建模
滤波器在滤除陀螺抖动信号的同时,必然引起陀螺信号的群延时[11],FIR滤波器具有严格的线性相位,固定群延迟的特性,能够满足激光陀螺POS数据群延迟恒定的要求。将式(9)进行变换,得到输出激光陀螺信号如式(11)所示:

当N为奇数时,滤波器传输函数如下式所示:

由式(19)可知,陀螺惯性输入角速率信号经过滤波器后,相对于信号发生时间均延后(N-1)2采样周期,则式(10)所示的65阶FIR数字低通滤波器群延时为32.5个采样周期。
2.2.2 激光陀螺POS信号时延分析
经进一步分析,激光陀螺POS内部引起信号时延的因素除滤波器外,还包括IMU内部橡胶减震器(减振器隔振频率200 Hz)等因素,从而导致POS信号总体延时大于数字滤波器引入的延时。将激光陀螺 POS与无延时光纤陀螺 POS进行时延对比。将激光陀螺IMU与光纤陀螺IMU安装在同一测试台上,让激光陀螺POS与光纤陀螺POS测量同一振动信息,并对测量的振动信息进行时域比对。如图3所示,激光陀螺POS信号相对光纤陀螺POS信号有17.3 ms的延时。
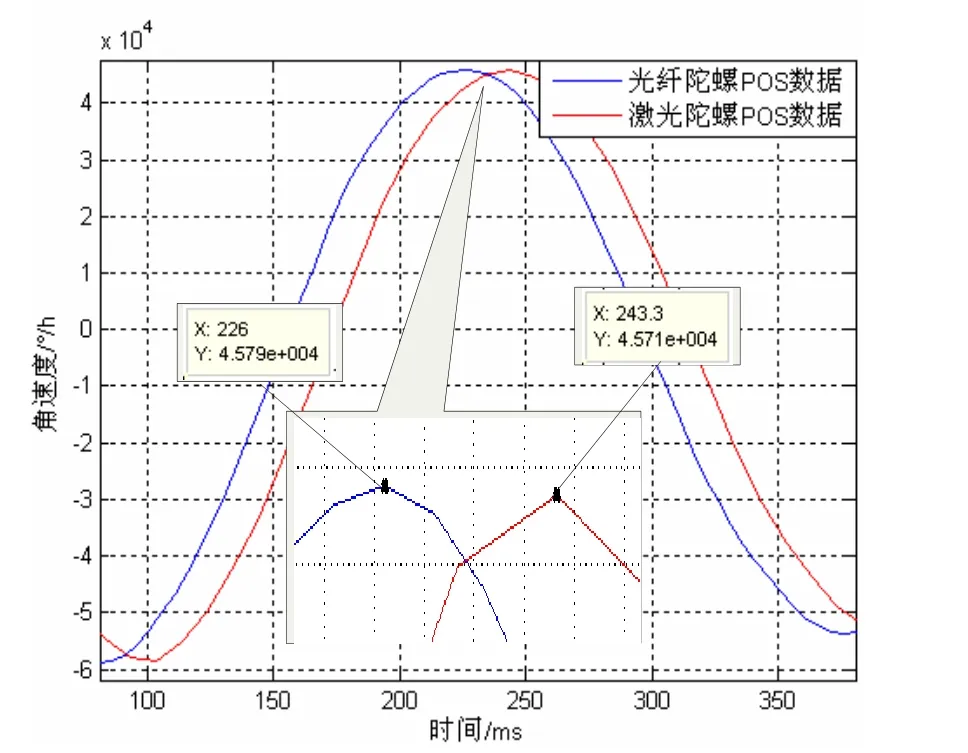
图3 时延补偿前后角速率对比Fig.3 Attitude contrast before and after delay compensation
以干涉SAR为例讨论时延补偿的必要性,文献[12]中提到为实现干涉SAR 5 m高程精度,要求系统位置精度达到0.1 m,姿态精度达到0.02°。对于激光陀螺POS系统,在飞行情况下(载机速度100 m/s,姿态速率最大 10 (°)/s),由时间延迟带来的位置误差达 1.73 m,姿态误差达0.173°,远大于干涉SAR的精度要求,所以必须对激光陀螺POS系统数据进行时延补偿。
在激光陀螺POS中,滤波器带来的信号时间延迟是恒定的,为32.5个采样周期,并且认为橡胶减振器引起的信号时间延迟为恒定值,其时延特性本文不做深入讨论,所以为实现激光陀螺POS数据与遥感载荷运动发生时间对齐,将POS输出数据时间标签向前补偿POS系统整体时延,将激光陀螺POS信号时间与载荷运动发生时间对齐,从而提高POS位置、姿态精度,提高对航空遥感载荷的运动补偿精度。
3 实验验证
3.1 静态实验
为验证滤波器抑制陀螺抖动信号的能力,对激光陀螺POS进行静态实验。将激光陀螺POS置于稳定基座上,在静态情况下,以4 kHz采样率采集多组激光陀螺信号进行分析,激光陀螺信号时域波形及其功率谱如图4所示。从图中可以看出,激光陀螺抖动信号功率高出低频有效信号功率60 dB左右,将有效惯性输入信号淹没,所以激光陀螺信息必须进行滤波。
将该陀螺信号通过式(10)所示的FIR数字低通滤波器进行滤波,得到滤波输出信号及其功率谱如图5所示。从时域图可以看出,信号抖动幅度峰峰值在0.1脉冲以内,从频谱图中可以看出,陀螺抖动噪声功率谱降低80 dB,低于低频惯性输入信号功率谱20 dB以上,从而使抖动噪声信号幅度较惯性输入信号幅度低一个数量级以上,满足激光陀螺POS对数据平滑的要求。

图4 激光陀螺信号及其功率谱Fig.4 Original RLG signal and power spectrum
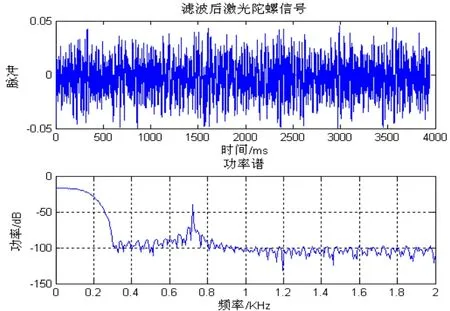
图5 激光陀螺滤波后信号及其功率谱Fig.5 Filtered RLG signal and power spectrum
3.2 飞行实验
为验证激光陀螺 POS时延补偿效果,本系统于2010年12月与中国科学院电子所研制的干涉SAR进行联合飞行实验,如图6所示。作为对比,机上同时搭载一套POS/AV510作为参考。载机搭载干涉SAR、激光陀螺POS和POS/AV510对测区进行多个架次雷达成像后,得到 POS数据、雷达测区成像数据和POS/AV510数据。对激光陀螺POS数据进行时延补偿和组合导航后处理后对干涉SAR运动误差进行补偿,并与POS/AV510进行位置误差和姿态误差对比。

图6 干涉SAR与POS联合飞行实验Fig.6 Flight experiment together with SAR
将激光陀螺 POS时延补偿前后姿态角与POS/AV510(POS/AV510位置精度0.05~0.3 m,航向角精度0.008°,俯仰角和横滚角精度0.005°[13])姿态角进行比较,如图7、8所示。从图中可以看到,时延补偿前后,激光陀螺POS与POS/AV510姿态角误差明显减小,如表1所示,航向角误差均方差由0.017°降到0.01°,俯仰角误差均方差由0.007°降低到0.005°,横滚角误差均方差由0.016°降低到0.005°,可见时延补偿明显提高了激光陀螺POS精度。分析可知飞机在进行转弯过程中,姿态角变动比较大,其中航向角和横滚角动态比较大,而俯仰角动态比较小,所以航向角和横滚角因为时延带来的动态误差比较大,而俯仰角误差比较小;并且惯导系统本身航向精度差,所以通过时延补偿带来的精度提高没有俯仰精度和横滚精度多。从时延补偿结果可以看出,该系统经过时延补偿后已经达到 POS/AV510精度,满足干涉SAR精度要求。
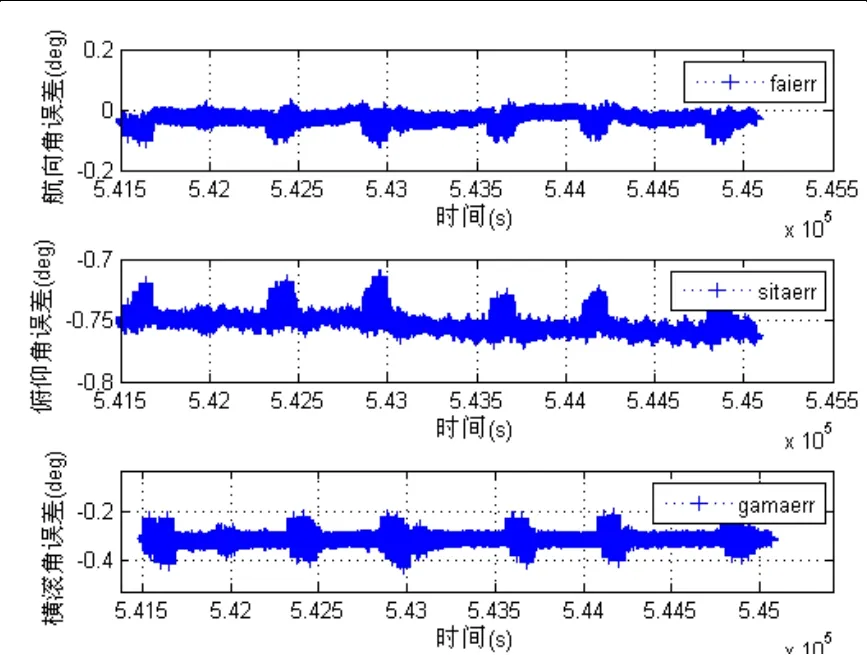
图7 时延补偿前姿态角误差Fig.7 Attitude error before delay compensation
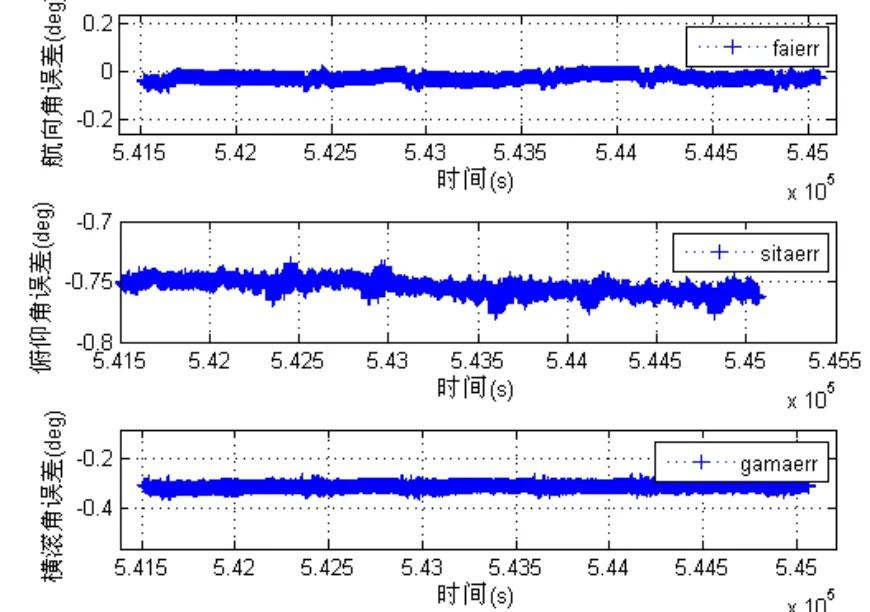
图8 时延补偿后姿态角误差Fig.8 Attitude error after delay compensation
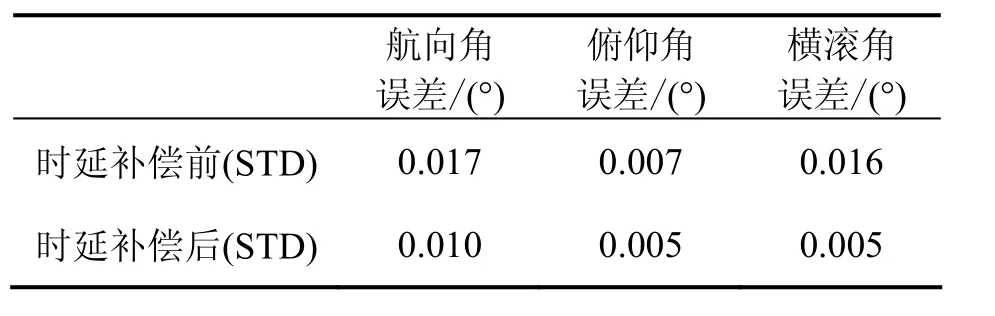
表1 激光陀螺POS与POS/AV510姿态角误差Tab.1 Attitude error between RLG POS and POS/AV510
4 结 论
本文基于激光陀螺 POS数据平滑和数据时延恒定、数据后处理的特点,针对激光陀螺抖动偏频特性带来的陀螺和加计抖动噪声,设计了适合激光陀螺POS的FIR数字低通滤波器。静态实验结果表明,该滤波器可以有效滤除激光陀螺的抖动信号达80 dB,低于有效惯性输入信号功率谱20 dB以上,满足激光陀螺POS数据平滑的要求;基于激光陀螺POS数据后处理特点,针对FIR数字低通滤波器引入的信号时间延迟,提出一种时延补偿方法,解决了信号时延引起 POS精度下降的问题。飞行实验结果表明与POS/AV510相比时延补偿前后姿态角误差明显减小,航向角误差均方差由0.017°降低到0.01°,俯仰角误差均方差由 0.007°降低到 0.005°,横滚角误差均方差由0.016°降低到0.005°,提高了POS精度。经时延补偿后,激光陀螺POS达到POS/AV510精度,满足干涉SAR精度要求。
(References):
[1] 中科院对地观测中心. 航空遥感系统的发展[EB/OL].[2008-07-05]. www.ceode.ac.cn Earth Observation Centre Chinese Academy of Sciences.The development of airborne remote sensing system[EB/OL]. [2008-07-05]. www. ceode. ac. cn
[2] Mohamed M R, Hutton M J. Direct positioning and orientation systems, How do they work? What is the attainable accuracy?[C]//American Society of Photogrammetry and Remote Sensing Annual Meeting.St. louis, MO, USA, 2001: 1-11.
[3] 宫晓琳,房建成. 模型预测滤波在机载SAR运动补偿POS 系统中的应用[J]. 航空学报,2008,29(1):102-109.Gong Xiaolin, Fang Jiancheng. Application of model predictive filtering method in POS for airborne SAR motion compensation system[J]. Acta Aeronautica Et Astronautica Sinica, 2008, 29(1): 102-109.
[4] Jiang Liming, Lin Hui. Integrated analysis of SAR interferometric and geological data for investigating long-term reclamation settlement of Chek Lap Kok Airport, Hong Kong[J]. Engineering Geology, 2010, 110(3-4): 77-92.
[5] Pan Xianfei, Wu Wengqi, Huang Xinsheng. Optimization on attitude algorithms for filtered data in dither RLG SINS[C]//2007 Second IEEE Conference on Industrial Electronics and Applications. Harbin: ICIEA, 2007:2067-2071.
[6] Lian Junxiang, Hu Dewen, Wu Yuanxin, et al. Research on SINS alignment algorithm based on FIR filters[J].Journal of Beijing Institute of Technology, 2007, 16(4):437-422.
[7] 张庆华,胡绍民,龙兴武. 机械抖动激光陀螺小时延信号处理方法的研究[J]. 国防科技大学学报,2010,32(2):163-166.ZHANG Qing-hua, HU Shao-nin, LONG Xing-wu.Research on small delay signal processor method of mechanical dithered ring laser gyro[J]. Journal of National University of Defense Technology, 2010, 32(2): 163-166.
[8] Kim K, Park C G. Drift error analysis caused by RLG dither axis bending[J]. Sensors and Actuators, 2007,133(A): 425-430.
[9] 王国臣,俞洁. 激光陀螺电路系统对其精度影响的实验分析[J]. 中国激光,2009,36(11):2873-2877.WANG Guo-chen, YU Jie. Analysis of the circuit infection to laser gyro[J]. Chinese Journal of Lasers, 2009,36(11): 2873-2877.
[10] 陈静媛. 激光陀螺捷联惯导系统数据采集电路的分析与实现[D]. 哈尔滨:哈尔滨工程大学,2008.
[11] Mitra S K. Digital signal processing: A computer-based approach[M]. Third Edition. Beijing: Publishing House of Electronics Industry, 2006: 103-115.
[12] 韦立登,向茂生,吴一戎. POS数据在机载干涉 SAR运动补偿中的应用[J]. 遥感技术与应用,2007,22(2):188-194.WEI Li-deng, XIANG Mao-sheng, WU Yi-rong.Application of POS data for airborne SAR motion compensation system[J]. Remote Sensing Technology and Application, 2007, 22(2): 188-194.
[13] Applanix. POS/AV510 Specification Sheet[EB/OL].Canada: Applanix. [2007-09-23]. www.applanix.com
猜你喜欢
通信电源技术(2020年8期)2020-07-21
小学生学习指导(低年级)(2019年10期)2019-10-16
中国惯性技术学报(2019年1期)2019-05-21
学生天地(2019年6期)2019-03-07
电子制作(2019年23期)2019-02-23
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中国惯性技术学报(2017年1期)2017-06-09
现代防御技术(2016年1期)2016-06-01
探测与控制学报(2015年4期)2015-12-15