地磁缓变区域的多维特征量匹配方法
2011-04-30 04:14陈励华王仕成郑玉航刘志国
中国惯性技术学报 2011年6期
陈励华,王仕成,孙 渊,郑玉航,刘志国
(第二炮兵工程学院,西安 710025)
近年来,利用地球物理特征实现无源自主导航的方法得到学者们的广泛关注,地磁导航由于具有无源、隐蔽、自主和低成本等特点已成为当前研究的热点之一[1-6]。
地磁导航算法主要有地磁滤波和地磁匹配两类。其中地磁滤波研究较为成熟,而地磁匹配的研究尚处于初始阶段[1]。地磁匹配的基本原理是通过求取地磁场实时测量序列与地磁基准图之间的相关性度量指标最优来获得对航迹的估计,为准确定位,要求匹配区域地磁场特异性突出,相应的地磁场变化应较为显著。在地磁场变化平缓、等值线平坦的区域,采用传统的地磁匹配算法,将无法获得较高的匹配概率和精度,甚至匹配失败。
地磁场矢量可以分解为七个基本要素,除此之外还有梯度、梯度张量等多个衍生要素。可以利用地磁场的这种高维特性描述对匹配算法进行改进,以多个要素作为特征量参与匹配计算,利用冗余信息去除误匹配,与传统单一特征量匹配相比,多特征量融合有利于提高定位精度。文献[7]用线性方程拟合三个要素的地磁场变化关系,通过求解线性方程组解决区域范围内地磁场匹配定位问题。文献[8]将多个要素各自匹配位置根据贡献权重,经过加权计算作为最终定位结果。这两种方法都为多特征量融合提供了解决方案,但也都有明显的应用限制,如前者要求地磁场线性近似化程度比较高,后者需要单特征量匹配结果具有较高的可信度。
本文针对地磁平缓地区的匹配问题提出一种多维特征量匹配的改进算法,通过建立多特征量最小距离度量指标,同时利用多个地磁场特征量进行相关性运算,在多维基准图中搜索指标最优值。仿真结果表明,本文提出的多特征量匹配算法在地磁平缓区域也可显著提高匹配性能,是理想的高精度定位方法。与现有多特征匹配相比,该方法对地磁场环境几乎没有使用限制,适应能力更强。
1 基于相关性度量的地磁匹配
1.1 地磁场的多维描述
地磁场是一個矢量场,空间中某一点的地磁场可以分解为7个地磁要素,其定义与方向如图1所示。图中F为总磁场强度,D为磁偏角,I为倾角,H为水平强度,Z为垂直强度,X和Y分别为H的北向和东向分量。这7个地磁要素之间的关系可用下式表示:
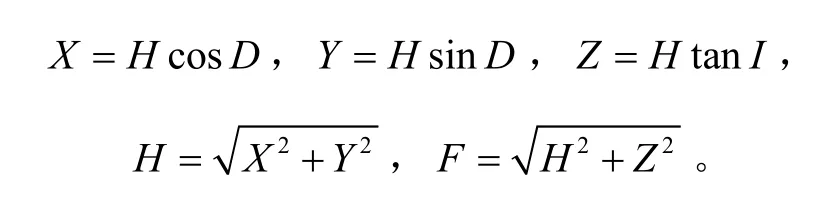
若要描述空间某点地磁场强度的大小和方向,以上 7个特征量中至少需要知道三个独立特征量的数值,这三个独立特征量被称为地磁三要素。而在匹配定位中,并不需要确切得到地磁场的矢量信息,可选任意一个要素作为特征量完成相关性度量。
1.2 相关性度量
地磁匹配与地形匹配相似,基准图为区域地磁场信息的二维图,实时图是航迹上的一维地磁场序列,匹配是在基准图的所有可能子图中寻找与实时图一致的地磁序列。由于磁传感器在实时图测量过程中存在着测量噪声、变换误差和其它误差因素,因此很难找到与实时图完全一致的基准子序列,匹配通过对实时图与所有基准子序列之间的相似程度度量完成。在地磁匹配导航中,度量实时图与基准子图相似程度的基本方法是相关性函数。
相关性函数指标包括距离与相似性两类,前者如平均绝对差(MAD)、平均平方差(MSD)等,后者如积相关(Prod)和归一化的积相关(Nprod)等,度量中要求距离指标最小,而相似性指标最大。
1.3 地磁匹配方法的隐含条件
地磁匹配通过遍历基准图搜索指标函数最值,因此可获得全局最优解。匹配计算中,为了减小搜索空间,用于度量的基准子图只在惯性导航系统(INS,Inertial Navigation System)指示航迹的平行航迹中选取。这表示地磁匹配无法脱离INS单独使用,只能作为惯性系统的辅助导航方式。搜索航迹与INS指示航迹形状相同的隐含假设是INS定位误差大小不变,而指示航向误差为零。当INS航向误差较小时,这种假设是合理的。
2 多维特征量最小距离度量匹配
利用三轴磁强计可以测量出地磁场的7个要素,本文提出的多维地磁匹配采用其中两个或两个以上的地磁要素作为匹配特征量,建立度量指标,在相应的多维基准图中搜索指标最优的位置。
以MAD度量指标为例。单一特征量匹配的情况下,预先存储在机载计算机中的地磁基准图数据为地磁场某一要素的幅值信息,表示为ML×NL的平面网格,Tm(u,v)为基准图坐标(u,v)处的值。载体运行中,沿着航迹实际测量地磁场相应要素的数据序列为T(k) ,k=1,… ,N,构成实时图,其中N为匹配序列长度。MAD距离度量最优函数计算如下:

在所有与INS指示航迹平行的基准子图中搜索以上指标函数最小值所对应的(u(k),v(k) ),作为对真实航迹的估计。匹配建立在对地磁场轮廓的识别之上,因此以上算法称作 MAGCOM(Magnetic Contour Matching),是目前地磁匹配的基本算法。理想情况下,实时图与基准图之间不存在误差,真实航迹必然指标最优,但指标最优的航迹并非一定是真实航迹,因为最优航迹可能并不唯一,这与地磁场本身的地理特异性是否突出、磁异常信息的丰富程度有关,因此从原理上看,匹配在地磁场平缓变化区域容易产生误匹配。实际匹配时,由于存在实测条件与基准图制备条件不一致、传感器误差等因素造成的噪声,更增加了误匹配的可能性。
采用m个要素进行匹配时,每个要素作为特征量根据式(1)均可计算MAD距离度量指标。估计航迹应满足每个要素的度量指标达到最优,即:

在估计航迹上m个指标di(u,v)都为所对应的最小值,可见这是个多目标优化问题。
理想情况下,估计航迹恰好为真实航迹时,能够实现各个子目标同时最优。但由于各个要素都不同程度地存在随机噪声,以上子目标难以匹配到完全相同的航迹上,因此一般情况下式(2)的优化问题难以找到绝对最优解。
求解时可将多目标问题转化到与之关联的单目标问题:

式中,iλ为权系数,权系数是否归一化不影响匹配结果,因此不作约束。权系数大小取决于各维地磁要素匹配定位的可信度。可信度能通过匹配概率体现,可对式(3)权系数赋值如下:

其中pi为各单一特征量的匹配概率,即某一要素匹配概率越高,对该特征量越重视。但某一区域单一特征量匹配概率往往与噪声密切相关,难以预先获知,因此需要给出更为实用的赋权方法。
匹配概率与地磁匹配区域的适配性有很大关系。所谓适配性是指特定区域地磁匹配提供INS导航位置修正信息的能力,由该区域地磁场的宏观起伏特征和微观破碎特征所决定,可以用一系列特征参数描述,如标准差、信息熵、分形维数、累加梯度等。即使同一区域,不同要素的适配性并不相同,可利用适配性参数得到权系数。
我们利用粗糙集理论对主要的适配性参数进行筛选[9],再利用层次分析法(AHP)对适配性影响较大的特征参数——标准差、分形维数、累加梯度、粗糙度进行总体排序[10],发现影响最显著的是分形维数,其次是标准差,得到用于评价适配性的综合指标:

式中,I(i)表示第i个要素的综合评价指标,1r表示分形维数,r2表示标准差。区域地磁场的标准差和分形维数越大,综合适配性指标越大,第i个要素在该区域匹配就易获得较高匹配概率,该要素在式(3)中权系数相应越大,因此将权系数赋值为:

3 仿真实验
根据地磁场自身特点并结合匹配中各个环节产生的误差来源,基准图和实时图之间的误差的最主要来源是地磁场短期变化和传感器噪声。前者经过补偿后的剩余误差可用分布于[-a/ 2,a/2]的均匀随机噪声描述,后者可用均值为0,方差σ2=b的高斯噪声描述[9]。
为验证多特征量匹配性能,对X、Y、Z三要素单独匹配和按照式(3)(4)对这个三要素同时最小距离度量匹配进行仿真。三要素基准图网格数目均为60×60,网格间距均为100 m×100 m。根据文献[9]地磁场信息熵定义计算各要素的熵均在11.8135附近,接近该区域熵的最大值11.8138,表明地磁场变化非常平滑,缺少起伏信息,是不适宜MAGCOM计算的地理区域。
匹配序列长度设置为N=10,实测序列两采样点间隔100 m,设置噪声参数a=10,b=10,噪声单位为nT。进行100次匹配的仿真结果如图2所示。图中表示方法说明如下:在MAGCOM假设条件下,认为INS无航向误差,匹配子图与INS航迹平行,因此忽略航迹形状,将匹配的结果起点与真实航迹起点间的距离作为匹配误差用于衡量定位性能。图中深色*标志代表真实路径起点所在位置,浅色✯标志则代表匹配航迹起点所在位置,这样的图表示更能体现在随机噪声作用下多次匹配结果的分散程度。
由图2可看出地磁缓变区域中,单一特征量匹配结果都造成目标函数不同程度地落入多个虚假定位点,匹配结果较为分散,以致匹配成功概率较低。而同时采用三个特征量计算度量指标,匹配结果都在期望解附近,这表示该方法避免了单特征量匹配中出现的虚定位,从而大幅度提高了匹配精度和匹配概率。文中以平均定位误差半径作为匹配精度指标,平均定位误差半径定义为多次匹配后匹配点平均值与真实位置的距离。定义正确匹配为匹配结果与真实位置之间误差不超过网格边长的 2倍,即141.4 m。正确匹配之外的所有定位点称为虚定位点。相应的完全匹配概率为正确匹配次数与总匹配次数的比值。
单特征量匹配和多维特征量匹配的精度和匹配概率数据对比如表1所示。
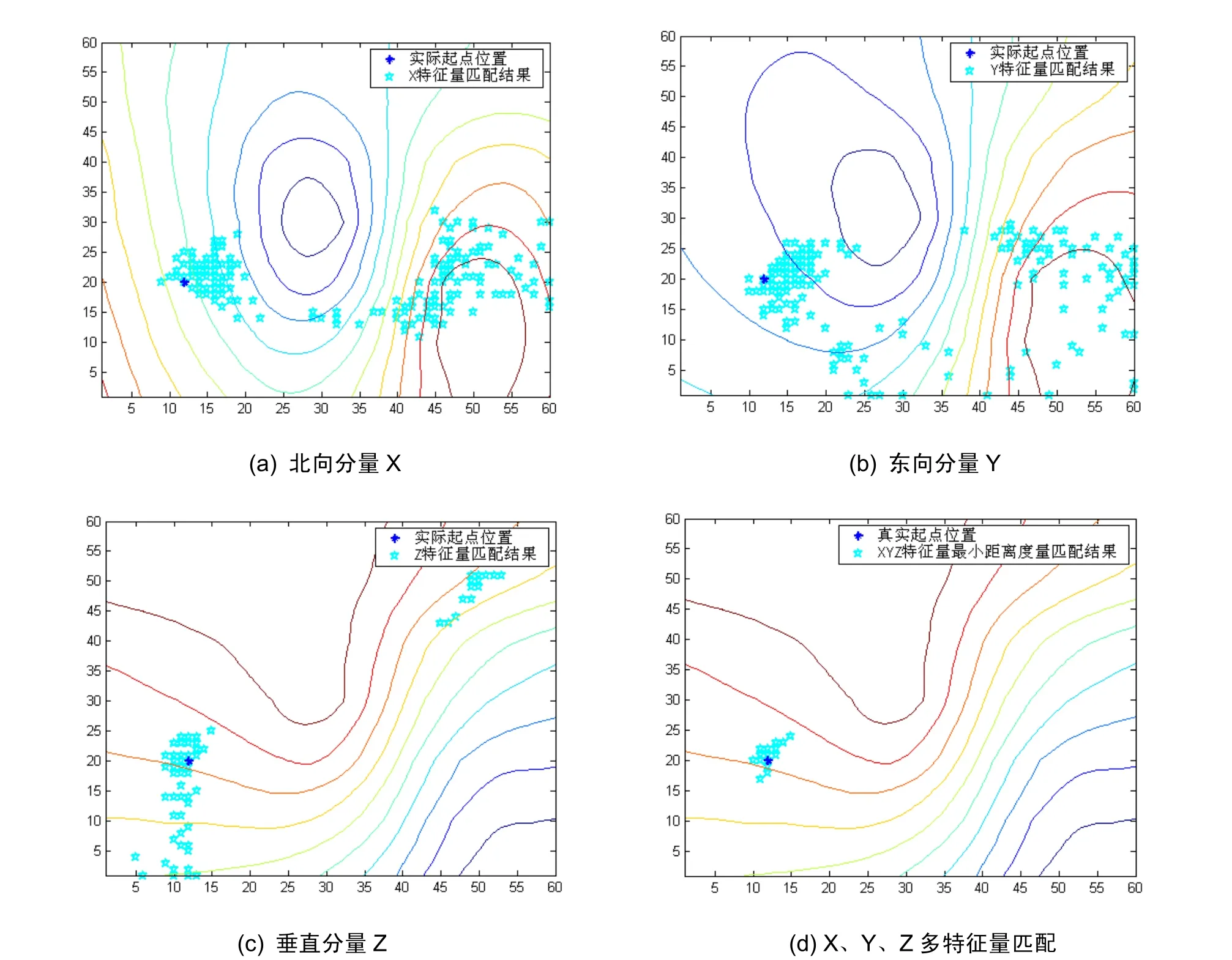
图 2 不同特征量匹配的结果Fig.2 Matching results of various feature elements

表1 不同特征量匹配概率与误差对比Tab.1 Comparison of matching probability and error in various elements matching
4 特征量维数影响分析
多维特征量匹配定位应选择多少维地磁要素参与匹配最适宜?以下将通过仿真实验给出相关结论,为多特征量匹配问题提供指导。
仿真实验重点关注特征量数目,因此在实验设计中,以现有地磁要素组合为基础,观察每增加一个新的特征量带来的性能指标变化。地磁场包含两类特征量:2个角度与5个强度幅度。二者量纲不同,距离度量计算必须考虑尺度变换。对尺度变换本文未作分析,因此仿真实验仅针对5个强度幅值要素进行。
在不同维数m条件下,选择特征量{Z}、{Y,Z},{X,Y,Z}、{X,Y,Z,F}、{X,Y,Z,F,H},以完全匹配概率和平均定位误差半径来衡量匹配结果的优劣。仿真区域、噪声条件、匹配长度同上,完成100次匹配,根据结果建立维数与匹配概率、定位误差的关系曲线如图3所示。
由图3可以看出,匹配性能随着匹配特征量维数的增加提高,表现为匹配概率总体呈现上升,同时定位误差下降。另一方面,当匹配特征量从一个增长为二个时,带来的匹配性能的提高最为显著,此后随维数增加,匹配概率提高的趋势逐渐缓慢,当特征量维数增加到5,匹配概率、精度与4维相比并未提高。表明维数增大到一定程度,难以通过增加维数来提高匹配性能。

图3 特征量维数对匹配概率和误差的影响Fig.3 Matching probability and accuracy vs.dimension of elements
在相同匹配区域与匹配长度下,特征量个数的增加会造成计算量增长。这意味着多特征量匹配一定程度上是以增加计算量为代价获得匹配性能改善。综合考虑计算量与匹配性能两方面影响,最小距离度量的特征量维数选择2~3为宜。
5 结 论
本文利用空间地磁场的向量特点,选用多个地磁场要素作特征量对现有地磁匹配方法进行改进,提出了多目标最小距离度量的信息融合方法。仿真试验表明,多维地磁场要素参与匹配过程,可滤除单特征量误匹配点,更易获得良好的精度和匹配概率,即使在地磁场变化平缓的区域也能得到令人满意的定位性能。
多特征量匹配充分利用地磁场信息,定位精度和匹配概率表现优异,而且对地磁场选区要求不高,扩展了地磁匹配的适用范围,为地磁场导航工程化提供了算法支持。该方法的不足之处在于匹配中用到多个地磁要素信息,引起基准图制备工作量的增加,还可能在实时测量中由于坐标轴变换引起新的误差。
(References):
[1] 周军,葛致磊,施桂国,刘玉霞. 地磁导航发展与关键技术[J]. 宇航学报,2008,29(5):1467-1472.ZHOU Jun, GE Zhi-lei, SHI Gui-guo, LIU Yu-xia. Key technique and development for geomagnetic navigation[J].Journal of Astronautics, 2008, 29(5): 1467-1472.
[2] Goldenberg F. Geomagnetic navigation beyond magnetic compass[C]// PLANS. San Diego, California, 2006: 684 - 694.
[3] Hamada T, Shigetomi T, Orimo Y. Study on underwater navigation system for long-range autonomous underwater vehicles using geomagnetic and bathymetric information[C]// Proceedings of the Seventeenth International Offshore and Polar Engineering Conference. Lisbon, 2007:1163-1168.
[4] Deutschmann J, Bar-Itahack I Y. Evaluation of attitude and orbit estimation using actual earth magnetic field date[J]. Journal of Guidance, Control and Dynamics. 2001,24(3): 616-626.
[5] Luo Shitu, Wang Yanling, Liu Yin, Hu Xiaopin. Research on geomagnetic matching technology based on improve ICP algorithm[C]// Proceedings of the 2008 IEEE International Conference on Information and Automation.Zhangjiajie, China, 2008: 815-819
[6] Ying Liu, Meiping Wu, Xiaoping Hu, Hongwei Xie.Research on geomagnetic matching method[C]// IEEE Conference on Industrial Electronics and Applications.2007: 2707-2711.
[7] 寇义民,温奇咏,王常虹,马广程. 一种基于地磁场曲面线性化拟合的快速导航定位方法[J]. 宇航学报,2009,30(2):497-502.KOU Yi-min, WEN Qi-yong, WANG Chang-hong, MA Guang-cheng. A fast positioning approach based on geomagnetic surface linearization[J]. Journal of Astronautics, 2009, 30(2): 497-502.
[8] 郭庆,魏瑞轩,周炜,许洁,郭创. 基于投影寻踪的多维地磁匹配融合算法[J]. 兵工学报,2010,31(2):235- 238.GUO Qing, WEI Rui-xuan, ZHOU Wei, Xu Jie, GUO Chuang. Multidimentional geomagnetic matching fusion algorithm based on projection pursuit[J]. Acta Armamentarll, 2010, 31(2): 235 - 238.
[9] 王哲,王仕成,张金生,乔玉坤,陈励华. 一种地磁匹配制导适配性特征参数选取方法[J]. 宇航学报,2009,30 (3):1057-1063.WANG Zhe, WANG Shi-cheng, ZHANG Jin-sheng, QIAO Yu-kun, CHEN Li-hua. A method of selection matching suitability characteristic parameter based on rough set theory in geomagnetism matching guidance[J]. Journal of Astronautics, 2009, 30 (3): 1057-1063
[10] 王哲,王仕成,张金生,乔玉坤,陈励华. 一种基于层次分析法的地磁匹配制导适配性评价方法[J]. 宇航学报,2009,30(5):1871-1878.WANG Zhe, WANG Shi-cheng, ZHANG Jin-sheng, QIAO Yu-kun, CHEN Li-hua. A matching suitability evaluation method based on analytic hierarchy process in geomagnetism matching guidance[J]. Journal of Astronautics, 2009, 30(5): 1871-1878.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
上海文化(文化研究)(2022年3期)2022-06-28
青年歌声(2019年12期)2019-12-17
五邑大学学报(自然科学版)(2019年3期)2019-09-06
江西教育B(2019年2期)2019-04-12
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
中国学术期刊文摘(2016年1期)2016-02-13
舰船科学技术(2015年8期)2015-02-27