
一种履带式全方位移动平台转向滑移功率比分析
2015-11-18 06:09张豫南黄涛张舒阳张杰
兵工学报 2015年8期
张豫南,黄涛,2,张舒阳,张杰
(1.装甲兵工程学院控制工程系,北京100072;2.63983部队,江苏无锡214035)
一种履带式全方位移动平台转向滑移功率比分析
张豫南1,黄涛1,2,张舒阳1,张杰1
(1.装甲兵工程学院控制工程系,北京100072;2.63983部队,江苏无锡214035)
针对现有全方位移动平台在工程应用的局限性,结合Mecanum轮和传统履带行走机构的结构原理,提出全方位移动履带,并描述履带式全方位移动平台的布局结构。由于履带在转向过程中也不可避免地存在与地面之间的滑动,为了比较履带式全方位移动平台与传统履带式移动平台的转向滑动阻力功耗,提出转向滑移功率比的概念,并分析中心转向的滑移功率比。研制采用独立电驱动的原理样车。当滚轮锁住时,样车可等效为传统履带式移动平台。分别测量在滚轮自由和锁住两种状态下样车以最高速度匀速中心转向时的总功耗,即电池的输出电流。试验结果表明,样车在滚轮自由状态下的转向总功耗比滚轮锁住状态下的转向总功耗减小了约53%.因此,履带式全方位移动平台可以改善传统履带式移动平台的转向功率消耗。
兵器科学与技术;全方位移动履带;移动平台;转向滑移功率比
0 引言
全方位移动平台是一类在地面上可实现3自由度运动(包括纵向运动、横向运动、中心转向运动以及它们的任意复合运动)的平台。它们具有高度灵活的机动性,特别适用于狭小空间或精确定位场合。目前,全方位移动平台的行走机构有多种,主要以轮式为主,包括Mecanum轮、连续切换轮、球轮、正交轮和万向轮等[1],其中Mecanum轮式全方位移动平台已在军事[2]、仓储运输[3]、医疗设备[4]和社会服务[5]等领域得到了广泛应用。轮式全方位移动平台在工程应用中仍具有很大的局限性,普遍存在行驶振动大、载重能力有限以及对路面条件要求高等问题。
众所周知,传统履带式移动平台具有运动平稳、载重能力强和越野能力强等优点。因此,本文为了克服现有全方位移动平台在工程应用中的局限性,结合Mecanum轮和传统履带式行走机构的结构原理,提出一种新型履带行走机构——全方位移动履带[6],并设计了履带式全方位移动平台。尽管国外相关研究人员已研制出4种可实现全方位运动的履带式行走机构,包括Omnidirectional spherical tire track[7],VUTON crawler[8],Omnidirectional free roller crawler[9-10],Omni-crawler[11-12],如图1所示。但是,上述机构还未在工程领域推广应用,并且它们的越野性能远不如传统履带行走机构。另外,基于VUTON crawler和Crawler-roller running mechanism平台的履带组布局结构也不适用于工程车辆。
本文研究的履带式全方位移动平台不仅可以实现全方位运动,还基本保留传统履带式移动平台的越野性能和履带组布局结构。Mecanum轮式全方位移动平台具有灵活的转向性能,转向阻力很小且主要为滚轮的滚动阻力。而传统履带式移动平台的转向性能差,转向阻力很大且主要为履带板与地面之间横向的滑动阻力。全方位移动履带是上述两种机构相结合的产物,它在转向时既会存在滚动阻力,又会存在滑动阻力。因此,本文主要分析履带式全方位移动平台与传统履带式移动平台的转向性能。

图1 现有的履带式全方位行走机构及平台Fig.1 The existing tracked omnidirectional running mechanisms and platforms
1 履带式全方位移动平台
1.1 全方位移动履带的原理结构
全方位移动履带的原理结构如图2所示。它具有传统履带行走机构的基本结构,包括履带、驱动轮、负重轮和托带轮等。其主要区别在于履带的结构。它是由一定数量的履带板通过销轴铰接而成,在每块履带板下方安装有滚轮,滚轮为圆柱形并且可以自由转动。滚轮轴线与履带板上销孔轴线构成一定的夹角,定义为偏置角α,其中,优选因此,全方位移动履带在地面上运动有两个运动自由度:一是沿纵向运动,即履带的卷绕方向;二是沿垂直于接地滚轮轴线方向运动。另外,在每块履带板下方可以设计有多个滚轮,从而在履带环上形成多排滚轮,增大履带的接地面积。
1.2 平台的布局结构
全方位运动是由“全方位移动履带”的组合实现的。由于平台实现全方位运动的必要条件是其逆运动学方程的速度逆雅可比矩阵列满秩,即秩为3[13],所以平台的履带数量不少于3[14].另外,考虑到平台的越野性能和履带组布局结构的工程实用性,因此本文研制的履带式全方位移动平台采用4条履带纵向对称布局结构[14],如图3所示。

图2 全方位移动履带的原理结构Fig.2 Principle structure of the omni-track
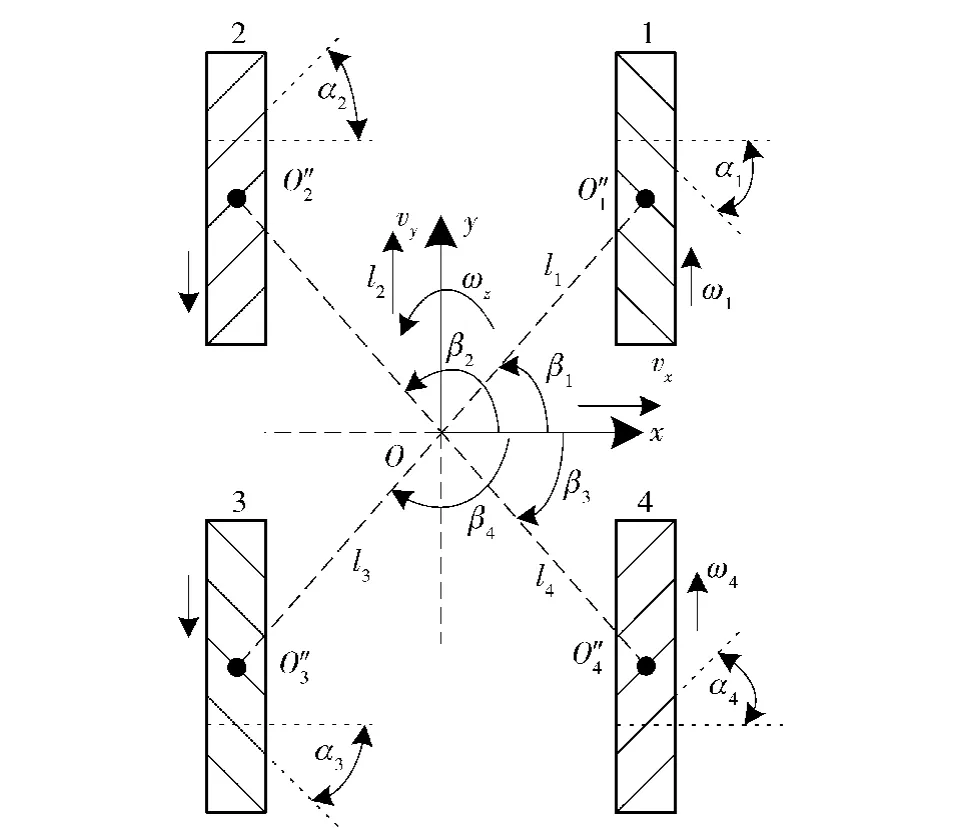
图3 履带式全方位移动平台的布局结构(俯视图)Fig.3 The layout structure of the tracked omnidirectional mobile platform(top view)
图3中,4个矩形框分别代表4条全方位移动履带的接地段,框中斜线方向代表接地滚轮的轴线方向。定义图中的参数如下:(ω1ω2ω3ω4)T为驱动轮的角速度;(vr1vr2vr3vr4)T为滚轮的滚动速度;(vyvxωz)T为平台中心的速度;r为驱动轮半径;l1=l2=l3=l4=l;-α1=α2=-α3=α4= γ;θ1=θ4=0,θ2=θ3=π rad;β1=β,β2=π-β,β3= β-π rad;因此,履带式全方位移动平台的逆运动学方程[14]为

由于(ω1ω2ω3ω4)T为主动变量,而(vr1vr2vr3vr4)T为被动变量,所以J为平台的速度逆雅可比矩阵,并且rank(J)=3.
2 转向滑移功率比分析
对于传统履带式移动平台,当其进行转向运动时,由于同一履带接地段上各点距离转向中心的长度向量不相同,所以各点的牵连速度向量不相同。然而,在理想条件下,它们的相对速度向量均相同,为履带沿纵向的卷绕速度。因此,它们的绝对速度向量也不相同且不都为0.由于传统履带行走机构不可能具有横向的相对速度,所以在转向过程中将产生横向的完全滑移,可能还存在纵向的部分滑移或滑转(不考虑履带宽度时,可忽略不计)。横向滑移是造成传统履带车辆转向功率消耗大的主要因素。
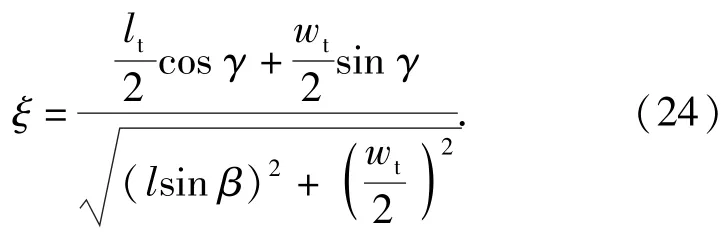
对于履带式全方位移动平台,当其进行转向运动时,虽然同一履带接地段上各点的牵连速度向量不相同,但是各点的相对速度向量可以不相同,因为每个滚轮可以独立转动。尽管同一滚轮上的接地点的相对速度是相同的,但是滚轮的长度相对较短,为了简化分析,仍将每个接地滚轮视为一个接地点。已知全方位移动履带的接地段可等效为其几何中心点[14],因此几何中心点的绝对速度在理想条件下应为0,即不产生滑移。对于其他接地点,由于在垂直于滚轮轴线方向可具有独立的相对速度,所以在垂直于滚轮轴线方向只产生滚动而不产生滑移,在平行于滚轮轴线方向仍产生滑移。总之,全方位移动履带由于有偏置的自由滚轮,可以将传统履带行走机构在转向过程中产生的横向滑移部分转化为滚轮的滚动。由于滚动阻力远小于滑动阻力,所以全方位移动履带可以减小传统履带式移动平台的转向滑移功率消耗,从而提高其转向效率。当滚轮被锁住,即不能自由转动时,全方位移动履带即可等效为传统履带行走机构。因此,为了比较履带式全方位移动平台与传统履带式移动平台的转向效率,本文定义了一个新的概念——转向滑移功率比ξ:

式中:P和P′分别表示履带式全方位移动平台和与其等效的传统履带式移动平台在转向运动中的滑移功率消耗;μ为地面的滑动摩擦系数;G为平台重力;分别表示上述两种平台的平均转向滑移速度。
履带与地面间的滑移运动随着转向半径变小而增大,直到中心转向时达到最高值[15]。因此,本文主要分析中心转向的滑移功率比。假设全方位移动履带具有任意排滚轮,分析其任意接地点的转向滑移速度,如图4所示。
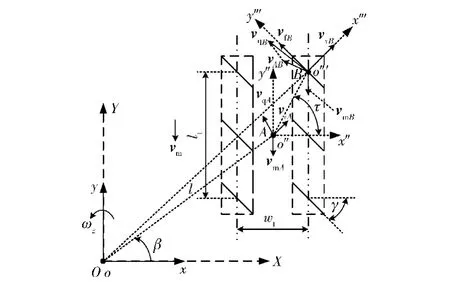
图4 任意接地点的转向滑移速度分析Fig.4 Steering slip velocity of any ground contact point
图4中:O点为转向中心,与平台几何中心o点重合;A点为接地段几何中心,B点为任意接地点;OXY为全局坐标系,并与平台坐标系oxy重合;o″x″y″为履带坐标系,o‴x‴y‴为任意接地点坐标系,其中y‴轴与滚轮轴线平行;τ为o″x″与o″o‴构成的角度。
履带运动是一种复合运动,它是由两种运动组成:一种是牵连运动,即履带随同车体相对于地面的运动;一种是相对运动,即履带相对于车体的运动[16]。定义牵连速度向量为νq,相对速度向量为νl,绝对速度向量为νf,并且满足:

由于全方位移动履带有两个运动自由度,所以其相对速度向量由这两个自由度的速度向量合成。定义vm为履带相对于车体的卷绕速度向量,vr为沿垂直于滚轮轴线方向的相对速度向量,则有

假设平台的转向角速度为ωz,那么A点和B点的牵连速度分别为
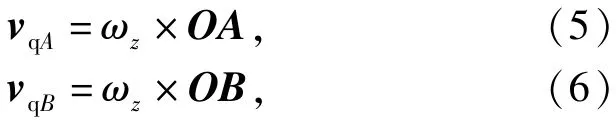
式中:|OA|=l.
联立(5)式、(6)式,可得

式中:vAB=ωz×AB.
已知A点的滑移为0,由(3)式、(4)式可得A点的绝对速度:

同理,B点的绝对速度为

由上述分析已知vfB沿y‴轴方向,因此(9)式可等效为

联立(7)式、(10)式,可得

已知:

联立(11)~(13)式,可得

再联立(8)式、(13)式和(15)式,可得

由图4可知:

定义(lx″ly″)为B点在o″x″y″坐标系的位置,则

联立(15)式~(18)式,可得

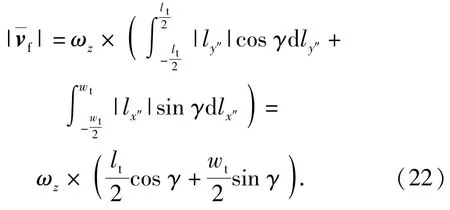
(19)式为任意接地点的绝对速度(滑移速度),根据积分中值定理,可求接地段的平均滑移速度:

由图4可知:

联立(19)式~(21)式,可得
当滚轮被锁住,即不能自由转动时,全方位移动履带将变为一个等效的传统履带行走机构。同理,分析等效的传统履带式移动平台的平均转向滑移速度为

因此,转向滑移功率比为
由图4可知,通常有
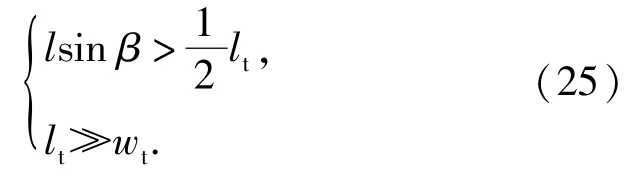
因此,联立(24)式、(25)式,可得

因此,履带式全方位移动平台的转向滑移功率消耗要小于传统履带式移动平台,故转向效率高。当时,由于ξ<0.707,履带式全方位移动平台的转向滑移功率消耗至少减小约30%.Mecanum轮可视为全方位移动履带的一种特例,因为它为点接地(接地段长度和宽度均为0)。根据(24)式可知Mecanum轮式全方位移动平台的转向滑移功率比为0,不存在滑动阻力的功率消耗。总而言之,履带式全方位移动平台的转向性能要好于传统履带式移动平台,但不如Mecanum轮式全方位移动平台。
另外,由(22)式可知,在滚轮偏置角确定的情况下,平均转向滑移速度只与履带接地段的尺寸有关,与平台的布局尺寸无关。因此,为了尽可能减小履带式全方位移动平台的转向滑移功率消耗,本文提出以下两个设计原则:
1)在满足平台承重要求的前提下,尽可能缩短履带接地段的长度。
2)履带接地段的长度通常远大于其宽度。当需要增大履带接地面积时,优先考虑增加滚轮的排数。
3 样车及试验
为了验证履带式全方位移动平台的转向性能,本文研制了履带式全方位移动平台的原理样车,如图5所示。
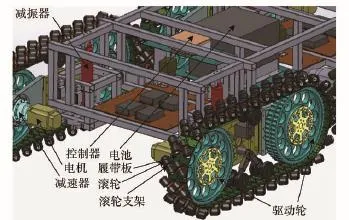
图5 原理样车的三维示意图Fig.5 The three-dimensional diagram of the prototype
由(1)式可知,要实现全方位运动,平台上每条履带必须具有独立的速度,并且能够快速响应,因此平台采用独立电驱动系统。本文中样车的每条履带由两个直流无刷电机驱动。为了保证全方位运动的精度,电机采用速度控制模式,通过三轴操纵杆和运动控制器遥控控制样车的运动方向和速度。样车的主要参数如表1所示。
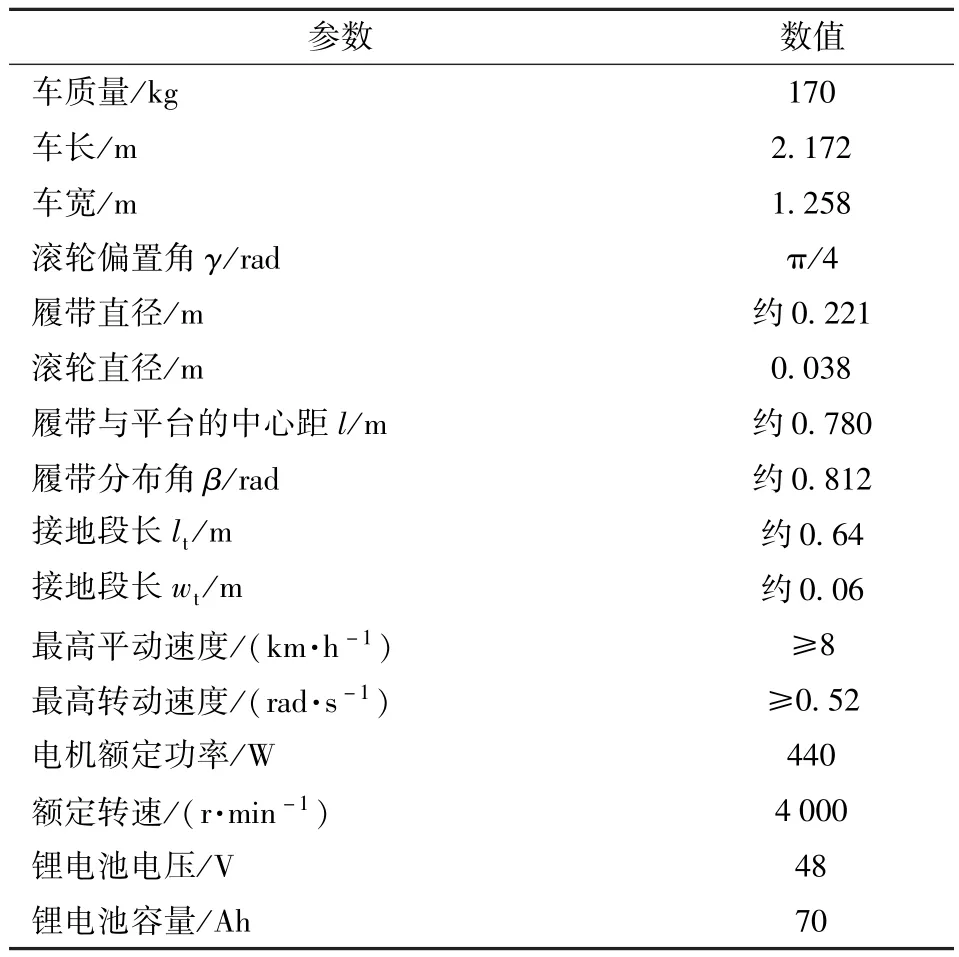
表1 样车的主要参数Tab.1 Primary parameters of prototype
样车的总转向功率消耗主要包括沿履带纵向的地面变形阻力、沿接地滚轮轴线方向的滑动阻力、垂直于接地滚轮轴线方向的滚动阻力、履带销轴的摩擦及电气部件等的功率消耗。相比滑动阻力部分的功率消耗,其他的功率消耗相对较小。另外,由于样车上每条履带同时由两个电机驱动,并且电机采用速度控制模式,所以也会存在因两个电机不完全同步而产生的功率消耗。相比传统履带行走机构,全方位移动履带能够减小的转向功率消耗主要是滑动阻力部分的功率消耗,上面定义的转向滑移功率比是滑动阻力部分的功率消耗比。然而,在实际试验中,难以单独测量出每一部分的功率消耗。因此只能测量和比较样车的总转向功耗,即电池的输出电流比。为了便于试验,本文控制样车以最高速度匀速中心转向,分别测量在滚轮自由和锁住两种状态下电池的输出电流。具体试验过程如下:选取一段平坦的水泥路面作为试验路面,控制操纵杆使样车达到并保持最高转速(约为0.52 rad/s),同时利用示波器和钳流表探头测量电池的输出电流,如图6所示。

图6 测量电池的输出电流Fig.6 Illustration of the measurement of output current of the battery
在滚轮自由状态下,保存匀速状态下任一时间段内的电流曲线如图7(a)所示,并计算其平均值约为13.53 A;同理,在滚轮锁住(由于滚轮中未安装轴承,在每个滚轮与其支架之间增加垫片即可锁住)的状态下,得到的电流曲线如图7(b)所示,计算其平均值约为28.93 A.
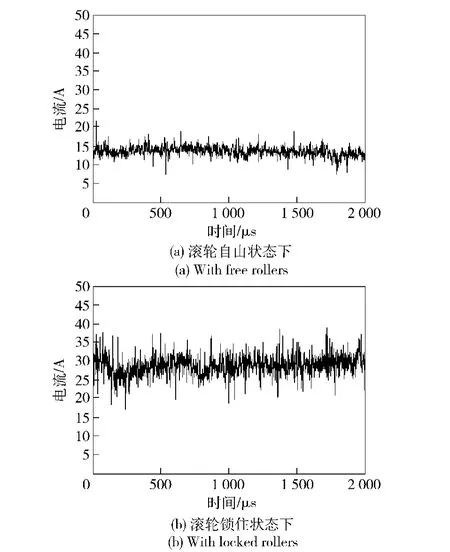
图7 中心转向时电池输出电流曲线Fig.7 Output current of battery in center-point steering motion
本文虽然无法直接测量出克服转向滑动阻力时电池所需输出的电流,但是结合在滚轮自由状态下样车以最高速度进行纵向运动时电池的输出电流约为8.68 A,由此可大致估算出克服转向滑动阻力时电池的输出电流约为4.84 A.因为根据(1)式可知,仅当平台进行纵向运动(沿y轴运动)时,接地滚轮不产生滚动,也不产生滑动,所以平台纵向运动时的主要功率消耗是除滚轮滑动阻力和滚动阻力部分以外的功率消耗。另外,由于在平坦路面上进行试验,所以滚轮滚动阻力的功耗很小,可忽略不计。
取地面滑动摩擦系数为0.76,电机效率为0.8,结合表1所示的参数,由(2)式、(24)式可得在滚轮自由状态下输出电流的理论平均值约为4.24 A,这与试验估算结果接近。由此,可以验证理论分析的正确性。
虽然难以准确计算出实际的转向滑移功率比,但是根据两种状态下平台的总转向功率消耗比(约0.47),可以表明样车比同等条件下的传统履带式移动平台的转向功率消耗减少了约53%.
众所周知,传统履带式移动平台转向时对路面容易产生破坏。因此,为了验证履带式全方位移动平台更加高效的转向性能,本文利用样车在一段不平的土路上进行了中心转向试验,如图8所示。由图8可知,样车在中心转向时,对路面的磨损很小,从而间接表明履带式全方位移动平台能够提高传统履带式移动平台的转向性能。
4 结论
全方位移动履带是一种新型履带式行走机构,它通过滚轮的自由转动将传统履带式行走机构在转向过程必然存在的横向滑移部分转化为滚轮的滚动,从而减小了转向的功率消耗,这从根本上改善了传统履带式移动平台的转向性能。当然,在一些比较恶劣的路面上,如松软的泥地等,由于滚轮的滚动阻力可能会增大许多,甚至滚轮无法自由转动,所以实际转向滑移功率比会增大,甚至接近于1.因此,本文分析的转向滑移功率比是基于滚轮可以自由转动的条件下所提出的。总之,履带式全方位移动平台的转向性能介于传统履带式移动平台和Mecanum轮式全方位移动平台之间,它可以改善传统履带式移动平台的转向性能。
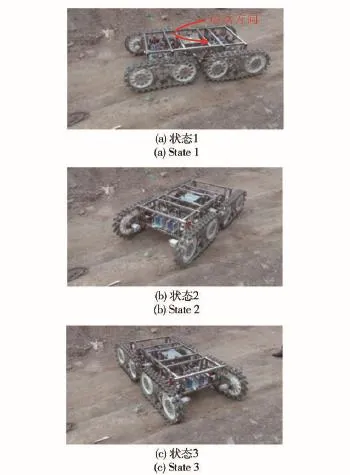
图8 不平土路上中心转向测试Fig.8 The center-point steering test on an uneven dirt road
(
)
[1]赵冬斌,易建强.全方位移动机器人导论[M].北京,科学出版社,2010. ZHAO Dong-bin,YI Jian-qiang.Introduction of omni-directional mobile robots[M].Beijing:Science Press,2010.(in Chinese)
[2]McGowen H.Navy omni-directional vehicle(ODV)development:where the rubber meets the deck[J].Naval Engineers Journal,2000,112(4):217-228.
[3]王双双.全方位移动平台运动仿真与控制研究[D].北京:装甲兵工程学院,2012. WANG Shuang-shuang.Research on simulation and motion control of omnidirectional platform[D].Beijing:Academy of Armored Forces Engineering,2012.(in Chinese)
[4]侍才洪.一种伤员换乘转运机器人的设计研究[D].北京:军事医学科学院,2010. SHI Cai-hong.Development of the robot for transferring the injuried[D].Beijing:Academy of Military Medical Sciences,2010.(in Chinese)
[5]Jung W K,Hyun S H,Bong S K,et al.Assistive mobile robot systems helping the disable walkers in a factory environment[J]. International Journal of ARM,2008,9(2):42-52.
[6]张豫南.一种全方位移动履带及其平台:中国,ZL201320057326.9[P].2013-07-24. ZHANG Yu-nan.An omnidirectional mobile track running mechanism and platform:China,ZL201320057326.9[P].2013-07-24.(in Chinese)
[7]West M,Asada H.Design of a holonomic omnidirectional vehicle[C]∥Proceedings of IEEE Internatioanl Conference on on Robotics and Automation.Piscataway,NJ,US:IEEE,1992:97-103.
[8]Damoto R,Cheng W,Hirose S.Holonomic omni-directional vehicle with new omni-wheel mechanism[C]∥Proceedings of IEEE International ConfErence on Robotics and Automation.Piscataway,NJ,US:IEEE,2001:773-778.
[9]Chen P,Mitsutake S,Isoda T,et al.Omni-directional robot and adaptive control method for off-road running[J].IEEE Transactions on Robotics and Automation,2002,18(2):251-256.
[10]Chen P,Koyama S,Mitsutake S,et al.Automatic running planning for omni-directional robot using genetic programming[C]∥Proceedings of IEEE International Symposium on Intelligent Control. NY,US:IEEE,2002:485-489.
[11]Tadakuma K,Tadakuma R,Kinoshita H,et al,Mechanical design of cylindrical track for Ssideways motion[C]∥Proceedings of IEEE International Conference on Mechatronics and Automation.Piscataway,NJ,US:IEEE,2008:161-167.
[12]Tadakuma K,Tadakuma R,Nagatani K,et al.Crawler vehicle with circular cross-section unit to realize sideways motion[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ,US:IEEE,2008:2422-2428.
[13]王一治,常德功.Mecanum四轮全方位系统的运动性能分析及结构形式优选[J].机械工程学报,2009,45(5):307-310. WANG Yi-zhi,CHANG De-gong.Motion performance analysis and layout selection for motion system with four mecanum wheels[J].Journal of Mechanical Engineering,2009,45(5):307-310.(in Chinese)
[14]黄涛,张豫南,田鹏,等.一种履带式全方位移动平台的设计与运动学分析[J].机械工程学报,2014,50(21),206-212. HUANG Tao,ZHANG Yu-nan,TIANG Peng,et al.Design& kinematics analysis of a tracked omnidirectional mobile platform[J].Journal of Mechanical Engineering,2014,50(21):206-212.(in Chinese)
[15]Merhof W,Hackbarth E M.履带车辆行驶力学[M].韩雪海,刘侃,周玉珑,译.北京:国防工业出版社,1989. Merhof W,Hackbarth E M.Running mechanics of tracked vehicle[M].HAN Xue-hai,LIU Kan,ZHOU Yu-long,translated. Beijing:National Defense Industry Press,1989.(in Chinese)
[16]汪明德,赵毓芹,祝嘉光.坦克行驶原理[M].北京:国防工业出版社,1983. WANG Ming-de,ZHAO Yu-qin,ZHU Jia-guang.Driving principle of tank[M].Beijing:National Defense Industry Press,1983.(in Chinese)
Analysis about Steering Slip Power Ratio of a Tracked Omnidirectional Mobile Platform
ZHANG Yu-nan1,HUANG Tao1,2,ZHANG Shu-yang1,ZHANG Jie1
(1.Department of Control Engineering,Academy of Amored Force Engineering,Beijing 100072,China;2.Unit 63983 of PLA,Wuxi 214035,Jiangsu,China)
For the limitations of the existing omnidirectional mobile platforms in engineering applications,an omnidirectional track is proposed based on the structure principles of the Mecanum wheel and conventional tracked running mechanisms,and the layout structure of the tracked omnidirectional mobile platform is described.A new concept of steering slip power ratio is proposed by comparing the power consumption of steering sliding resistance of the tracked omnidirectional mobile platform with that of conventional tracked mobile platform because of inevitable slippage between the omnidirectional track and ground in steering motion.And the slip power ratio of steering motion at center point is analyzed.A prototype equipped with an independent electric driving system is developed.When the rollers are locked,the prototype is equivalent to an conventional tracked mobile platform,so the total power consumption of steering motion at center point,which is the total output current of the battery,is measured at the highest and uniform speed in the conditions of free rollers and locked rollers.The results show that the total power consumption of the prototype with free rollers is approximately 53%less than that of the prototype with locked rollers in the center-steering motion.
ordnance science and technology;omnidirectional track;mobile platform;steering slippower ratio
U270
A
1000-1093(2015)08-1562-07
10.3969/j.issn.1000-1093.2015.08.026
2014-09-09
国防重点项目(2015ZB15)
张豫南(1961—),男,教授,博士生导师。E-mail:zhang_yunan@sina.com
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
车主之友(2022年4期)2022-08-27
汽车实用技术(2022年10期)2022-06-09
农业装备与车辆工程(2021年8期)2021-08-28
兵器装备工程学报(2021年3期)2021-04-09
南方农机(2021年1期)2021-01-20
现代营销·理论(2019年10期)2019-09-10
中国科技纵横(2017年13期)2017-08-09
科技视界(2014年6期)2014-12-24
坦克装甲车辆(2000年6期)2000-06-13
