飞艇矢量推力与舵面复合控制分配研究
2017-09-28 12:02苏润赵明
电脑知识与技术 2017年24期
苏润,赵明
(中国电科集团公司第三十八研究所,安徽合肥 230088)
飞艇矢量推力与舵面复合控制分配研究
苏润,赵明
(中国电科集团公司第三十八研究所,安徽合肥 230088)
传统飞艇、固定翼以及旋翼飞机的技术特点越来越多地融合于现代飞艇的设计之中。矢量推力与舵面复合控制分配是其中一项关键技术。该文分析了链式分配法和数学规划法两种典型控制分配方式的特点。考虑飞艇低速舵面失效问题,结合飞艇矢量推力与舵面复合控制的实际需要,提出一种新型的控制分配方法。通过仿真分析,该方法可以保证飞艇低速时操纵控制的有效性,在此基础上尽可能以最小的能量消耗达到需要的控制效果。
控制分配;飞艇;矢量推力;舵面
1 概述
1852年9月24日,法国人吉法德(Giffard)把氢气充入一个“橄榄型”气囊(图1),驾驶着这艘由3 HP蒸汽机驱动的44 m飞艇,在巴黎郊外飞行了27 km,正式宣告了飞艇的诞生。1929年8月29日,“齐伯林伯爵”号飞艇降落在美国新泽西州的莱克赫斯特,成功完成了历时21天5小时31分、行程31400 km的环球飞行(图1)。这标志了飞艇成为航空器领域不可或缺的一个分支。

图1 吉法德飞艇示意图(左)与“齐伯林伯爵”号飞艇(右)
经过一百多年的发展,现代飞艇在外型、结构、动力等方面都取得了极大的进步。美国洛克希德·马丁公司研制了一种原形飞艇(图2),代号为P-791。该飞艇采用三囊体布局形式,飞艇气囊在产生浮力的同时还会产生气动升力。除了常规操纵舵面,飞艇两侧和尾部安装有两组共4个可90°偏航,90°俯仰的矢量涵道螺旋桨推进器。2016年8月17日,由英国HAV(Hy⁃brid Air Vehicles)公司打造的全球最大飞行器Airlander 10试飞成功,吸引了全世界的目光(图3)。该艇全长92米,宽43.5米,高26米,体积38000立方米,在侧面和尾部安装有4台矢量推力推进器,用于提供飞行动力和短距起降过程的升力。

图2 洛克希德·马丁公司P-791飞艇 图3英国HAV公司Airlander 10飞艇
现代飞艇结合了传统飞艇、固定翼以及旋翼飞机的技术特点,采用了低阻、高升力的艇囊外型,在静浮力基础上增加了气动升力和矢量推进力。因此,现代飞艇的操纵特性和稳定特性得到了极大地提升。与此同时,矢量推力与舵面的复合控制分配问题,成为了现代飞艇控制系统的关键环节,具有极大的理论和工程研究价值。
2 过驱动系统控制分配
过驱动控制系统一般由运动控制器、控制分配器和执行机构控制器三个部分组成[1],如图4所示。高层的运动控制器用以求解出系统所需的伪控制输入τc。伪控制输入通常是作用于系统的一些力和力矩,其数量m需不少于运动控制系统的维度n,以满足系统可控性的要求。假设动力学方程对于控制输入是线性的,有:
其中f和g分别为系统函数和输入函数,x∈Rn为系统状态向量,τ∈Rm为系统输入。
控制分配器用来将系统所需的伪控制输入τc映射到各个独立的真实执行机构,使得各执行机构产生的力和力矩分量之合τ=τc。一般采用如下形式表示:
其中,h为函数,u∈Rp为各执行机构对控制系统的输入。若各执行机构的操作量与产生的力和力矩为线性函数关系,式可改写为线性控制分配方程:

根据过驱动控制系统的定义,有p>m。因此,控制分配问题的求解在数学上可表述为给定τ=τc反求u。
此外,在实际系统中,执行机构会受到自身能力以及外加载荷等物理约束,其物理量输出须满足:

umin,umax,u˙min,u˙max分别为最小、最大物理量幅值约束和最小、最大物理量变化速率约束。
底层的各个执行机构的闭环控制器,用以控制单一执行机构产生的物理量输出。实际应用中,底层控制器通常集成于执行机构模块内部,自成一个整体。
3 数学规划最优控制分配
数学规划方法可以分为线性规划和二次规划两种[2]。其区别在于对代价函数的不同选择。线性规划取控制量的线性函数而二次规划取控制量的二次函数。等式约束定义了控制变量的解空间,而不等式约束则体现了执行机构的位置和速率限制。这两种方法都包括代价函数、等式约束和不等式约束三个重要元素。取误差最小化作为线性规划目标函数[3]有:
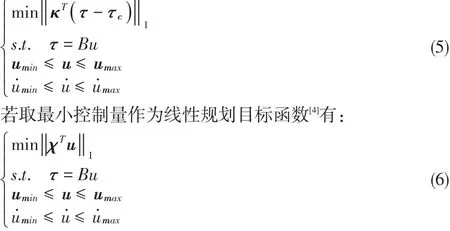
将误差最小和控制量最小两个目标组合为一个代价函数并转化为标准的线性规划形式[5]有:

在飞艇正常飞行中,舵面操纵所消耗的能量远小于矢量推力,同时舵面执行机构的寿命和可靠度也远大于矢量推力系统。因此,相对矢量推力应当优先使用舵面操作。数学规划法将执行机构的物理输出总和降至最低,这对于同种类多执行机构的分配有着不错的效果。而对于矢量推力与舵面复合控制系统,却忽略了不同种类执行机构的优先级问题。
4 链式控制分配
链式法控制分配法将控制量按优先级分为若干组[7],每一组均可以产生期望方向的力矩。应用中先启用某一组主控制量,若出现饱和,则依次启用下一组辅助控制量。将控制效率矩阵和执行机构都相应进行分组,那么链式法可以表示为:

式中,bi和ui( )i=1,2,…,p分别为对应的分组矢量。链式法可以最大限度地使用高优先级的执行机构,并减少效率的损耗。
对于矢量推力与舵面复合控制系统有:

其中us和ut分别为舵面和矢量推力的物理输出。当气动舵面处于速率约束和幅值约束范围之内时,误差信号ε=0,矢量推力不工作;当气动舵面超出速率约束和幅值约束范围时,ε>0,矢量推力开始工作,以补偿气动舵面的操纵力矩不足。
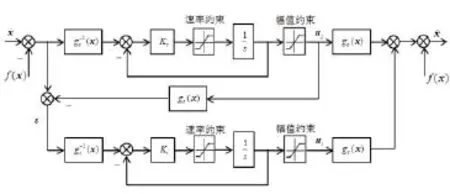
图5 链式控制分配结构图
链式控制分配法可以避免矢量推力系统长时间工作,增加其寿命和系统的可靠性,同时减少了推力的损失。但是在飞行操纵中,只有当气动舵面超出速率约束和幅值约束范围时,矢量推力才会开始工作。在飞艇低速飞行或者动压较小时,矢量推力介入常常滞后,舵面往往偏转较大容易进入饱和,并可能由此引起执行机构大幅振荡。
5 考虑优先级的新型数学规划分配方式
综合数学规划法和链式法控制分配的特点,理想的分配方式应当首先保证操纵控制的有效性,在此基础上尽可能以最小的能量消耗达到需要的控制效果。当飞艇具有一定的速度,形成的动压足够大时,舵面操作足以完成绝大部分控制要求,此时完全可以采用链式分配方式,按照优先级依次使用舵面和矢量推力进行操作。当飞艇速度较低,动压较小时,舵面操作的效率低下,此时应以控制操作的有效性为首要目标,建立一种新型的数学规划分配方式。
对于矢量推力与舵面复合控制系统,式可改写为:

考虑舵面和矢量推力的操作效率,选取目标函数为:

式中,λ为与动压相关的一个系数。当飞艇动压很小时,即使舵面操作幅度很大,实际产生的操作效果并不明显。因此,舵面操作的效率不能只看物理输出量的大小,还需要乘以一个与动压相关的系数。这里假设当动压Q小于Q∗时,舵面操作效率不足,有:

此外,τsmax和τtmax分别为舵面和矢量推力的最大输出物理量值。由此可知,式中目标函数J为舵面操作的效率与矢量推力效率之和。
将式带入式:


同理可得:

从式和式可以看出,当低动压时,λ=0,us=0,ut=B-t1τ。操纵力矩完全映射给矢量推力,舵面的物理量输出为0。当动压逐渐增大时,us值增大,ut相应减小。操纵力矩完全映射给舵面比重增多,直至矢量推力的物理量输出为0。
将该数学规划分配方式与链式法相结合,得到新的分配法,其结构如下图6所示:
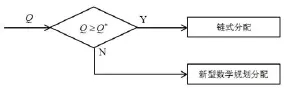
图6 新型控制分配结构
6 仿真和结论
为了检测新的控制分配法的效果,对其进行了仿真。仿真中假设虚拟控制指令并且 -6≤ τs≤ 6,-3≤ τt≤ 3。当动压很小时,不妨设Q=0.1·Q∗,改进型数学规划分配方式和直接链式分配结果如图7所示。
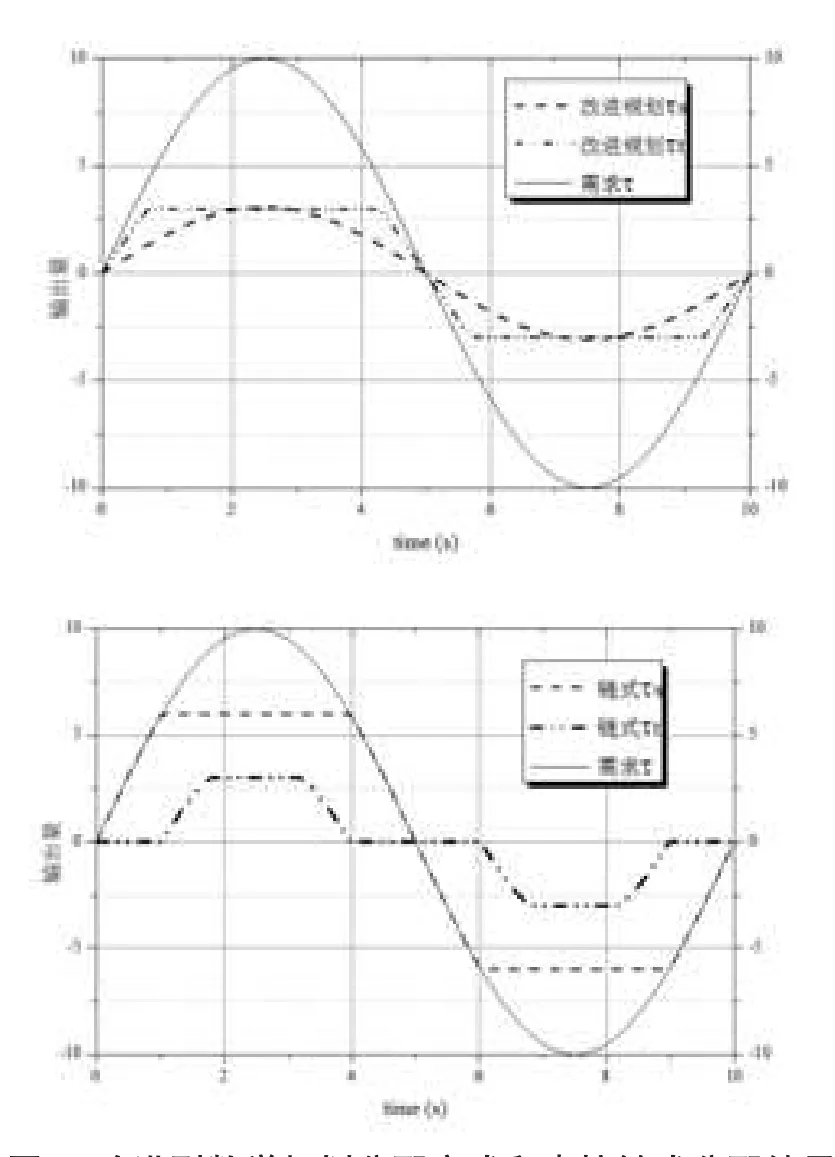
图7 改进型数学规划分配方式和直接链式分配结果
当需求τ从零开始逐渐增大时,链式分配法先增加舵面分量τs,当τs饱和后矢量推力分量τt开始增加;而改进型数学规划分配方式会同时使用舵面分量τs和矢量推力分量τt。此外,在低动压下矢量推力分量τt还大于舵面分量τs,这保证了低动压下控制的有效性。
随着飞艇动压的增大,λ也逐渐增大。由图8分配结果可知,相同输出量需求的情况下,随着飞艇动压增大,舵面输出的比重逐渐增大,而矢量推力的输出量比重相应减少。当λ=1时,进入链式分配法模式。
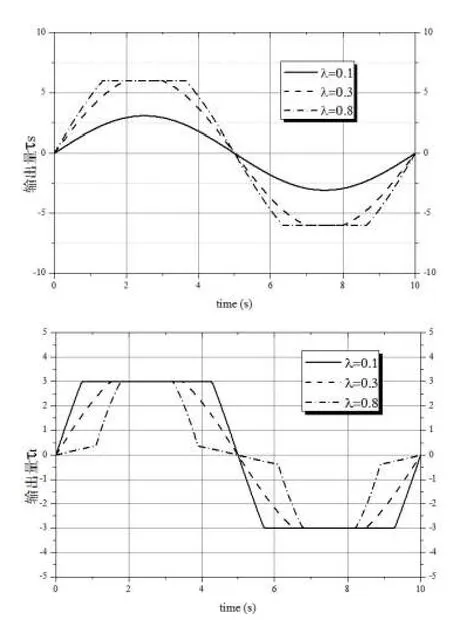
图8 新型控制分配法随λ变化的分配结果
通过前文所述可见,链式分配法和数学规划分配法各自具有自己的优势和应用领域。链式控制分配法可以避免矢量推力系统长时间工作,增加其寿命和系统的可靠性;但存在矢量推力介入滞后的问题。常规数学规划法将所有执行机构等价对待,这又忽略了舵面操纵和矢量推力优先级的问题。
针对飞艇矢量推力与舵面复合控制分配的实际问题,本文提出了一种综合链式分配法和数学规划分配法的新型分配方式。该分配方法可以根据动压的大小动态调整矢量推力分量的比重,保证飞艇低速时操纵控制的有效性。在飞艇正常飞行中,能优先使用更经济的舵面操纵方式,避免了矢量推力的频繁使用,以最小的能量消耗达到所需的控制要求。这种新型控制分配方式,对于采用矢量推力与舵面复合控制的飞艇具有重要的工程意义和实用价值。
[1]T.A.Johansen,T.I.Fossen.Control Allocation-A Survey[J].Auto⁃matica,2013.1-17.
[2]马建军.过驱动系统控制分配理论及其应用[D].长沙:国防科学技术大学,2009.
[3]M.Bodson.Evaluation of Optimization Methods for Control Al⁃location[J]AIAA Guidance,Navigation,and Control Confer⁃ence and Exhibit,Montreal,2001.
[4]M.Bodson,S.A.Frost.Control Allocation with Load Balancing[J]AIAA Guidance,Navigation,and Control Conference,2009.
[5]M.Bodson.Evaluation of Optimization Methods for Control Al⁃location[J]AIAA Guidance,Navigation,and Control Confer⁃ence and Exhibit,Montreal,2001.
[6]J.A.Petersen,M.Bodson.Constrained Quadratic Programming Techniques for Control Allocation[J]Control Systems Technolo⁃gy,IEEE Transactions on,2006,14[1]:91-98.
[7]A.R.Teel,J.Buffington.Anti-windup for an F-16’s Daisy Chain Control Allocator[J]Proc.of AIAA GNC Conference,1997:748-754.
TP391
A
1009-3044(2017)24-0221-03
2017-07-06
苏润(1976—)男,中国电子科技集团公司第三十八研究所高级工程师,中国科学技术大学博士,从事浮空器系统研究工作;赵明(1986—),男,中国电子科技集团公司第三十八研究所高级工程师,从事浮空器系统研究工作。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
遥测遥控(2022年1期)2022-02-11
兵器装备工程学报(2021年12期)2022-01-11
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07
电测与仪表(2015年21期)2015-04-09
飞行力学(2015年5期)2015-03-15
组合机床与自动化加工技术(2014年10期)2014-03-01