六足机器人爬坡性能分析及步态选择
2018-08-15 02:17王瑞霄朱雅光马云祥黄纯收
现代制造技术与装备 2018年7期
王瑞霄 朱雅光 马云祥 黄纯收
(长安大学 工程机械学院,西安 710064)
移动机器人是最早研究、应用最广泛的一类特种机器人[1]。它们所采用的运动方式主要有轮式、履带式、足式、飞行式等,其中,相比轮式和履带式的移动方式,足式移动机器人可通过一系列与地面相接触的离散点作业,具有较好的越障性能[2]。坡度障碍是移动机器人常见的障碍之一,具有良好的爬坡性能对于移动机器人有重要意义。其中,爬坡速度、爬坡稳定性及最大爬坡角度是衡量爬坡性能的重要指标。步态是指机器人行走时各条腿的相位关系[3]。六足式机器人具有多种步态,面对不同坡度,机器人采用何种步态能发挥最佳爬坡性能,是本研究的主要内容。
本研究涉及的腿型为半圆弧腿。其最初在移动机器人RHex[4]上采用,近年来,学者们对弧腿机器人的研究工作主要有弧腿结构设计[5]、运动特性分析[6-7]、弧腿机器人应用[8-9]等。
1 爬坡步态分析
1.1 机器人结构
六足式弧腿机器人由中央控制器、驱动模块、弧腿机构、供电模块、外壳体组成,如图1所示。其每条腿只有一个自由度,降低了控制的复杂度。
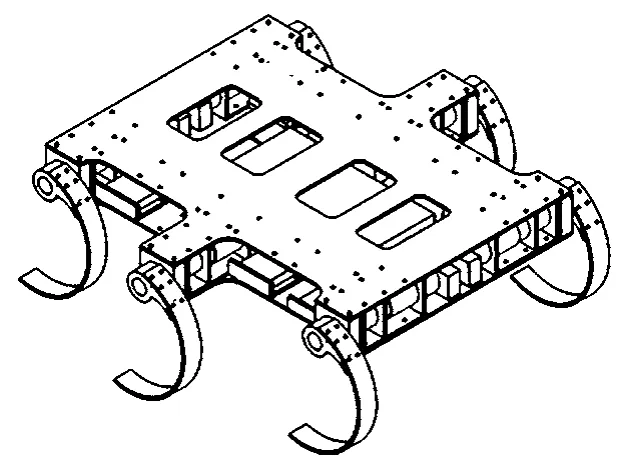
图1 机器人结构
1.2 爬坡步态
六足机器人在正常工作时,其步态通常是规则且周期性的,典型的有三角步态、四足步态和波动步态。三角步态,即由一侧前足、后足与另一侧中足构成的两组足交替摆动支撑实现机器人的移动;四足步态,机器人在任一时刻的状态均为四足支撑的同时两侧各有一足向前摆动同步步态;波形步态在每一时刻均有五足支撑,六足按照一定的顺序依次摆动[10],如图2所示。另外,六足任一刻均同步动作,称为同步步态,由于该步态能承受较大载荷,故对坡度越障极为有益。
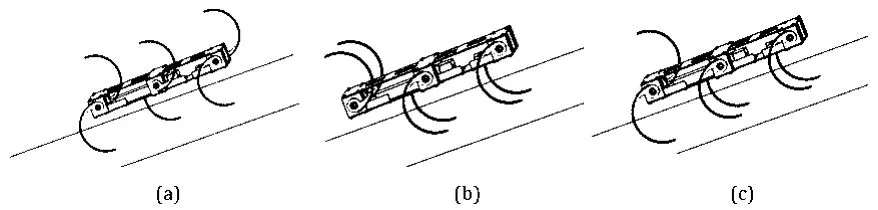
图2 三种步态示意图
为使机器人爬坡时机身平面时刻与坡面平行,以保证工作时的基本稳定,三角步态和同步步态将作为两种爬坡步态被讨论。
1.3 爬坡步态参数
六足机器人在工作时,根据足部状态的不同,可分为接地相[11]和飞行相[12]。接地相是机器人足部接触地面时的状态,飞行相是机器人足部离开地面时的状态。用tgi表示第i号足处于接地相的时间,T为足完成一个循环运动的时间,T’表示时间T内机身被支撑的时间,即机身运动的时间,则占空系数β可以用接地相的时间tgi与一个循环周期T的比值来表示,即:

βi表表示第i号足的占空系数。
2 爬坡速度及稳定性分析
2.1 爬坡速度对比
将六足机器人两侧的足依次标号为1-6[13],如图3所示。

图3 腿部编号
当机器人处于三角步态,且第1、3、5足处于接地相时,第2、4、6足处于飞行相,因此有:

当机器人处于同步步态,其六条足同时处于接地相或飞行相,故有:

则对于三角步态:

对于同步步态:


因此,当驱动弧腿的电机转速相同时,在同一个循环周期T内,有:其中,v三是三角步态下机身的速度,v同是同步步态下机身的速度。
可以看出,当机器人分别以以上两种步态爬坡时,在电机转速相同的条件下,以三角步态作业时速度更快。
2.2 稳定性分析
静态稳定裕度法(static stability Margin,ssM)是由Mc Ghee&Iswandhi 于1976年在重心投影法的基础上提出的新的机器人静态稳定性判据[14]。其指在给定的支撑区域内,机器人重心投影到支撑区域水平投影各个边界距离的最小值。其数学表达式为:

式中,(sssM)min=lMN>0为静态稳定裕度;lMO为支撑腿数,lMG1为重心投影至支撑多边形第i条边的距离。当sssM>0时,机器人处于稳定状态;反之,则是不稳定的。
六足机器人以三角步态爬坡时,其两组足交替摆动,显然,在足状态发生切换时,其稳定性最差,且稳定裕度最小。图4中,M为机器人重心在水平区域的投影,G1、G2、G3分别是三个处于接地相的足的接地点在水平区域的投影,a为机身宽度,b为机身长度,θ表示坡面角度,可以看出:

lMN可通过lMG1和φ求得,而在投影区域确定的条件下,若能得到lMO,则可通过三角形MOG1求得lMG1和φ,,进而得到 lMN,即 (sssM)min。
h为此时重心的垂直高度,其与弧腿直径有关。
可以看出其推导较繁琐,故本研究将从几何关系上得出结论。
六足机器人以同步步态爬坡时,在足状态发生切换时,其稳定性最差,且稳定裕度最小。如图5所示,此时机器人的六个足全部接地,其在水平区域投影分别是G1、G2、而在图4中不难推出,总大于l。


图4 三角步态稳定裕度分析图
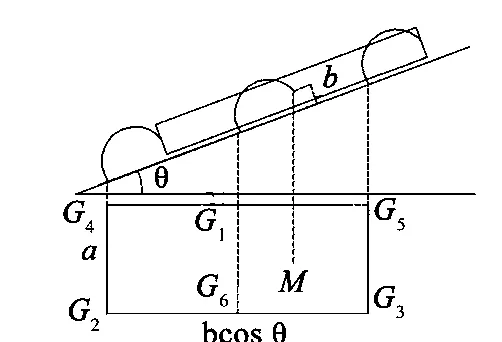
图5 同步步态稳定裕度分析图
因此,得出结论,对于同一结构参数的六足式弧腿机器人,在爬坡作业时无论其采用三角步态或是同步步态,均处于稳定状态,但采用同步步态时,其最小稳定裕度相比于三角步态下更大,故稳定性更好。
3 不同步态下的爬坡角度推导
先对机器人弧腿进行受力分析,如图6所示。机器人爬坡作业过程中,其腿部受电机驱动力矩T,弧腿自重F’,由机身自重在弧腿髋部产生力F,F1、F2分别是坡面对弧腿的支持力和摩擦力。假设弧腿自重不计。
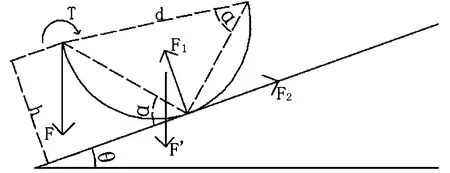
图6 腿部动力学模型
根据力矩平衡原理,可得:
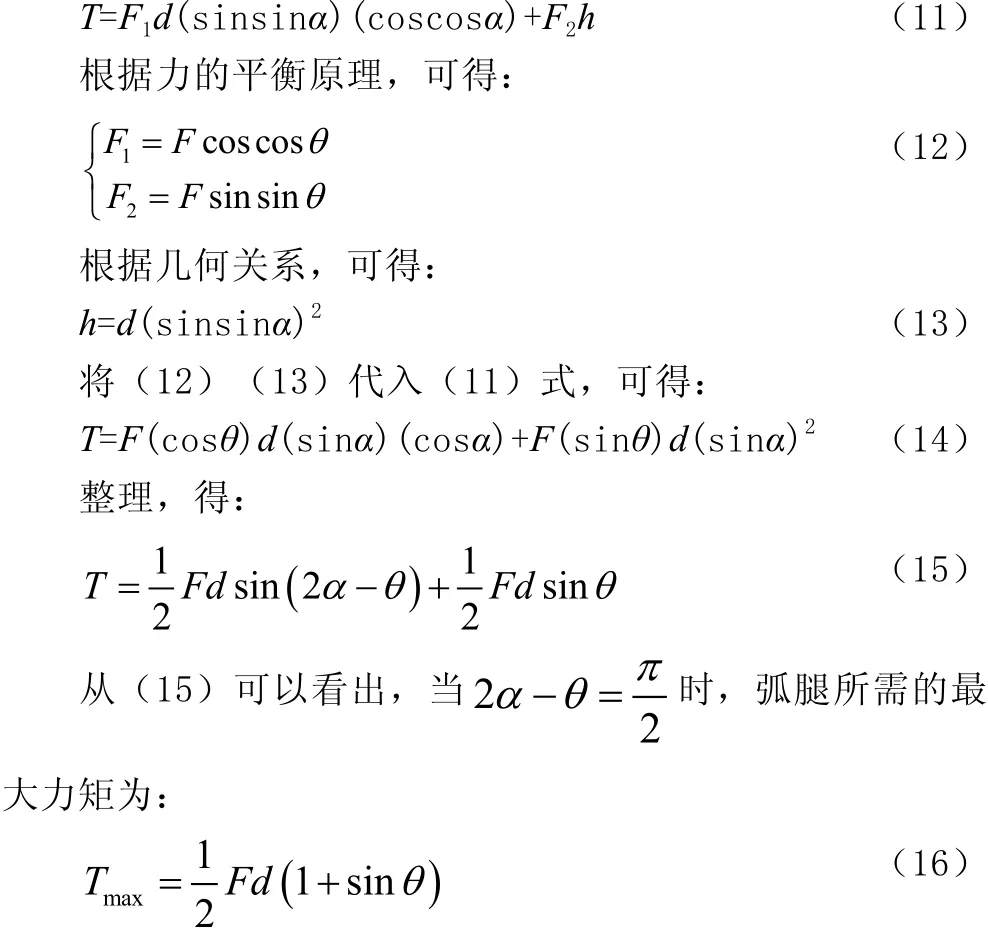
假设电机所能提供的最大驱动力矩为Ts,由Tmax≤Ts,得:

即为当前机器人的最大爬坡角。
从(17)可以看出,当Ts、d一定时,θmax仅取决于F的大小。
设机器人机身重为P,由图3可知,当机器人采用三角步态时,可得

代入(17)中,可得:

当机器人采用同步步态时,可得:
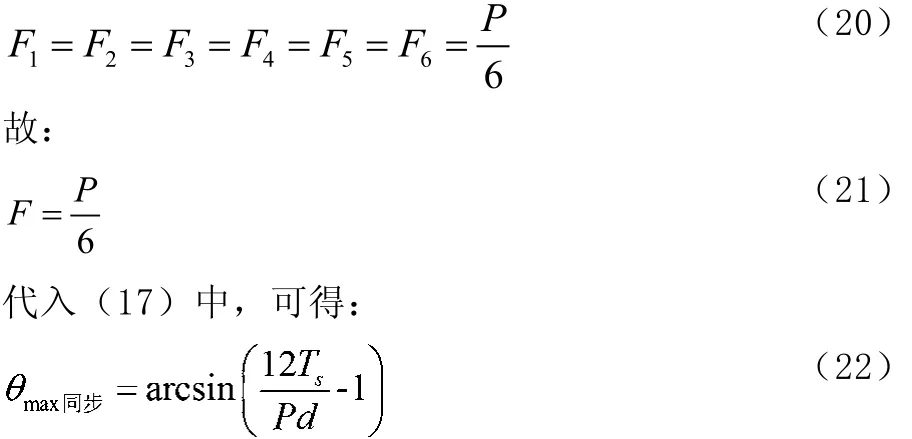
显然:

另外,只有当坡面提供足够的摩擦力时,式(23)才可成立,即:其中,f是摩擦系数。

因此,得出结论,对于结构参数、腿部材料相同的六足式弧腿机器人,在爬坡作业时,相比三角步态,若采用同步步态,其最大爬坡角度更大。
4 软件仿真及实验研究
本文利用ADMAs对虚拟样机进行仿真,以验证上述对六足式机器人爬坡作业的性能分析。表1给出了样机的结构参数。
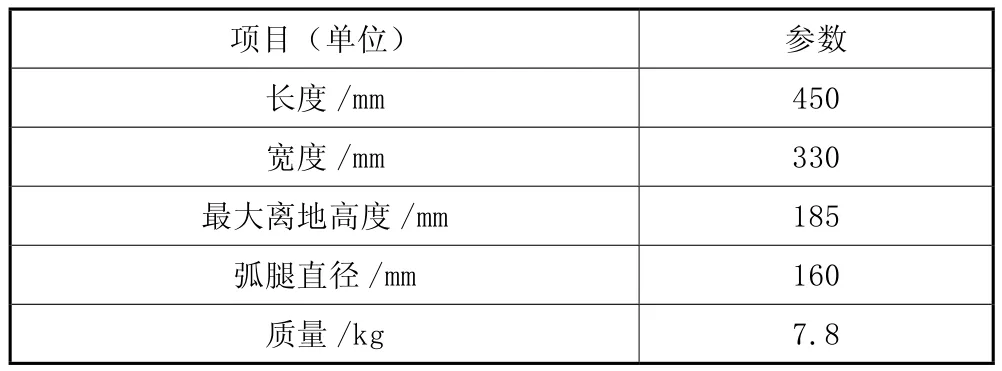
表1 样机结构参数
如图7,设定弧腿转速,πrad/s。弧腿与坡面间的静摩擦系数为0.4,坡面角度20°,可看出在经历相同的时间后,相比于同步步态,采用三角步态的机器人行进距离更大,由于坡面角度不大,故作业过程中两种步态都表现出良好的稳定性。

图7 软件仿真
在软件仿真基础上,装配出了实际的物理样机。为验证不同坡面角度下六足机器人的可爬性、爬坡速度及稳定性,以坡面角度为实验变量、爬行距离为常量,分别在5°、10°、15°、20°、30°坡面上进行实验,得到成功系数、爬行速度。实验结果如表2所示,成功系数为0.5表示机器人可以在当前坡面角度下启动,但由于行进稳定性较差而失稳。
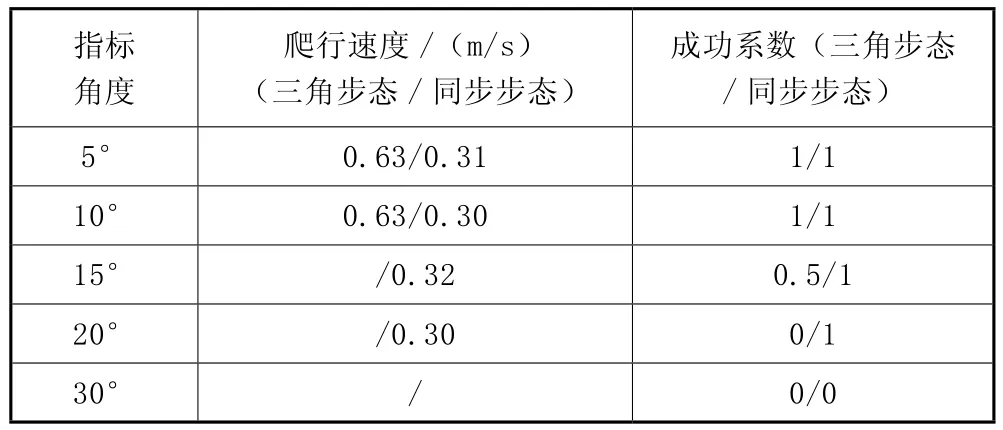
表2 实验结果
通过对实验结果的分析,可以看出当爬坡角度较小时(5°、10°),无论采用三角步态还是同步步态,均能成功完成爬坡作业,但三角步态下的爬坡速度更快,对比数据可发现近似成两倍的关系,这验证了对机器人爬坡速度的理论分析;当爬坡角度较大时(15°),以三角步态行进时由于稳定性较差,发生失稳,导致爬坡失败;当爬坡角度为20°时,采用三角步态会导致力矩超过额定转矩,视为爬坡失败;当爬坡角度为30°时,根据式(21),采用同步步态本该完成爬坡作业,但由于不满足式(24),即坡面无法提供足够的摩擦力,导致爬坡失败。
5 结论
针对六足式弧腿机器人的坡度越障,本文从爬坡速度、爬坡稳定性及最大爬坡角度三方面,通过对步态参数和稳定裕度的分析,以及对弧腿动力学模型的建立,研究了三角步态和同步步态下机器人的爬坡性能,实验研究表明:对于同一结构参数的六足式弧腿机器人,相比采用同步步态,三角步态下机器人爬坡速度更快,但其稳定性较差,且最大爬坡角度较小。另外,本文推导出了不同结构参数下的最大爬坡角,可利用计算值与传感装置所检测的当前坡度值相比,以做出最优的步态选择。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
电气电子教学学报(2022年3期)2022-07-30
中国舰船研究(2022年1期)2022-03-19
当代陕西(2021年13期)2021-08-06
当代工人(2020年1期)2020-05-11
电子制作(2018年18期)2018-11-14
宇航总体技术(2018年5期)2018-10-15
通信电源技术(2018年7期)2018-09-23
自动化学报(2018年6期)2018-07-23
中国环境监察(2016年11期)2016-10-24