播种机自动控制系统的设计—基于模糊自动控制和反馈调节
2019-12-22 02:31刘岩
农机化研究 2019年6期
刘 岩
(新疆工程学院 控制工程学院,乌鲁木齐 830023)
0 引言
在现代化农业高效高产目标的驱动下,自动化机械得到了迅速的发展,采用自动化作业装置代替传统的手工操作势在必行。目前,我国自动化农田作业装置大部分还是采用机械式或者液压式的,不仅装置笨重,控制效率和准确度也较低。近年来,随着电控系统的不断发展,电控式农业机械已经初步得到了推广。自动化播种机是农业生产过程中最常用的机械之一,采用自动作业播种机不仅可以缩短播种周期,还可以提高播种质量。为此,本文将模糊控制系统引入到了播种机的自动调速和转向系统中,以期提高播种机自动作业的控制速度和精度,进而提高播种机作业的自动化程度。
1 播种机速度检测和方向控制系统设计
随着播种机自动化作业水平的不断提高,无人驾驶播种机也逐渐在农田实际作业过程中展开试验研究。要实现播种机的无人驾驶自动化作业,必须解决播种机的方向控制问题,特别是在转向过程中,需要对速度进行实时的监测。因此,在转向过程中采集车速,然后反馈给控制系统,将车速降低到转向需要的转速,从而提高转向的稳定性。目前,转速的测试主要有两种传感器,包括轴编码器和模糊转速计。
1.1 轴编码器
轴编码器主要是用来测试车轮旋转轴的转速和位置。绝对位置编码器一般用来检测转轴的相对位置,而增量式编码器一般被用来检测转速,在检测速度过程中可以直接产生脉冲序列。轴编码器一般采用光学编码器,可以利用电磁学原理制成霍尔效应编码器。
1.2 模拟转速计
模拟转速计安装在电机轴上,其输出的是电压信号,该信号与转速成正比。但是模拟转速计输出的不是直接的数字信号,要显示数字量还需要进行AD转换,并且对电机的输出动力也会有影响。因此,对比轴编码器,本文设计采用增量式编码器。增量式编码器主要分为3种,包括光栅式编码器、反射式光学编码器和霍尔效应编码器。为了获得高效和精度较高的编码器,本次采用光栅式编码器,如图1所示。
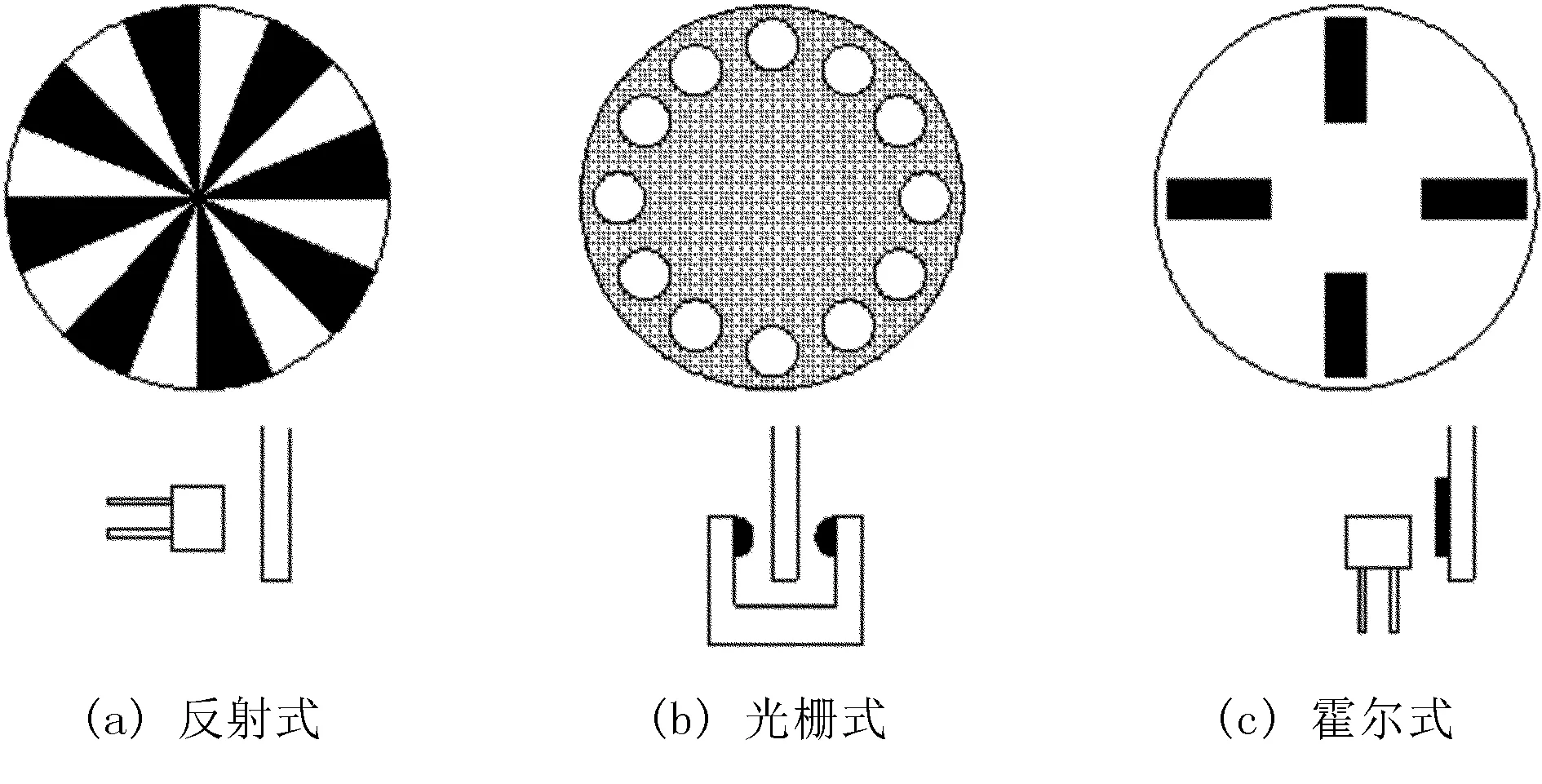
图1 增量式编码器Fig.1 Incremental encoders
对于播种机方向的控制,本次采用PWM波对舵机进行控制。控制过程采用固定的周期信号来实现,转向的方位角和脉冲的宽度呈现正比例的关系,如图2所示。

图2 脉宽与转角之间的线性关系Fig.2 The linear relationship between the pulse width and the diversio angle
在进行实际控制时,首先在舵机内部采用一个50Hz的脉冲基础信号,然后将外部的PWM信号和基准信号进行对比,确定转向和转角。为了实现准确自动转向,可以采用PID反馈调节的方式,将播种机摄像机采集得到的图像信号与导航标致线进行对比,得到较为准确的转角;然后将转角信息传送给控制电机,实现无人驾驶播种机的自动化作业。
2 基于模糊控制和反馈调剂的播种机自动控制系统设计
为了提高播种机的自动化转向精度,可以采用反馈调节的方式,但这个过程计算量比较大。为了提高播种机的控制效率,根据播种机运动反馈信号和采集图像信号,利用模糊控制规则实现播种机的快速自动控制,其系统结构框架如图3所示。
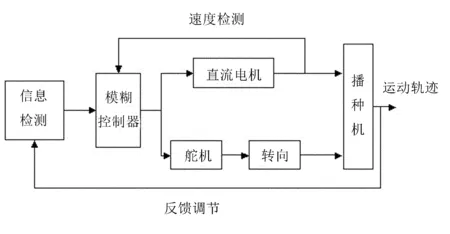
图3 播种机模糊控制反馈系统模型框图Fig.3 The model block diagram of fuzzy control feedback system for sowing machine
在实际自动反馈调节过程中,由于计算机采用的是采样控制方法,只能根据采样间的偏差进行自动化控制,这需要对控制方程进行离散化处理。假设采样周期为T,连续时间可以看成是一系列的采样时刻点KT,将积分近似替换为累加求和,将微分近似替换为一阶向后差分,其控制过程为
t=KT
(1)
(2)
(3)
其中,e(k)表示采样系统的k时刻偏差;e(k-1)表示采样系统的k-1时刻偏差;k表示采样序列号,其值为k=0,1,2,...。于是,可以得到离散化的PID表达式为


(4)

(5)
由反馈调节的表达式可以看出:输出与过去的状态有关,需要对历次的偏差进行累计。利用递推算法,考虑第k-1次采样时,则
(6)
将公式(5)和公式(6)相减可得
(7)
整理后得
u(k)=u(k-1)+a0e(k)-a1e(k-1)+
a2e(k-2)
(8)

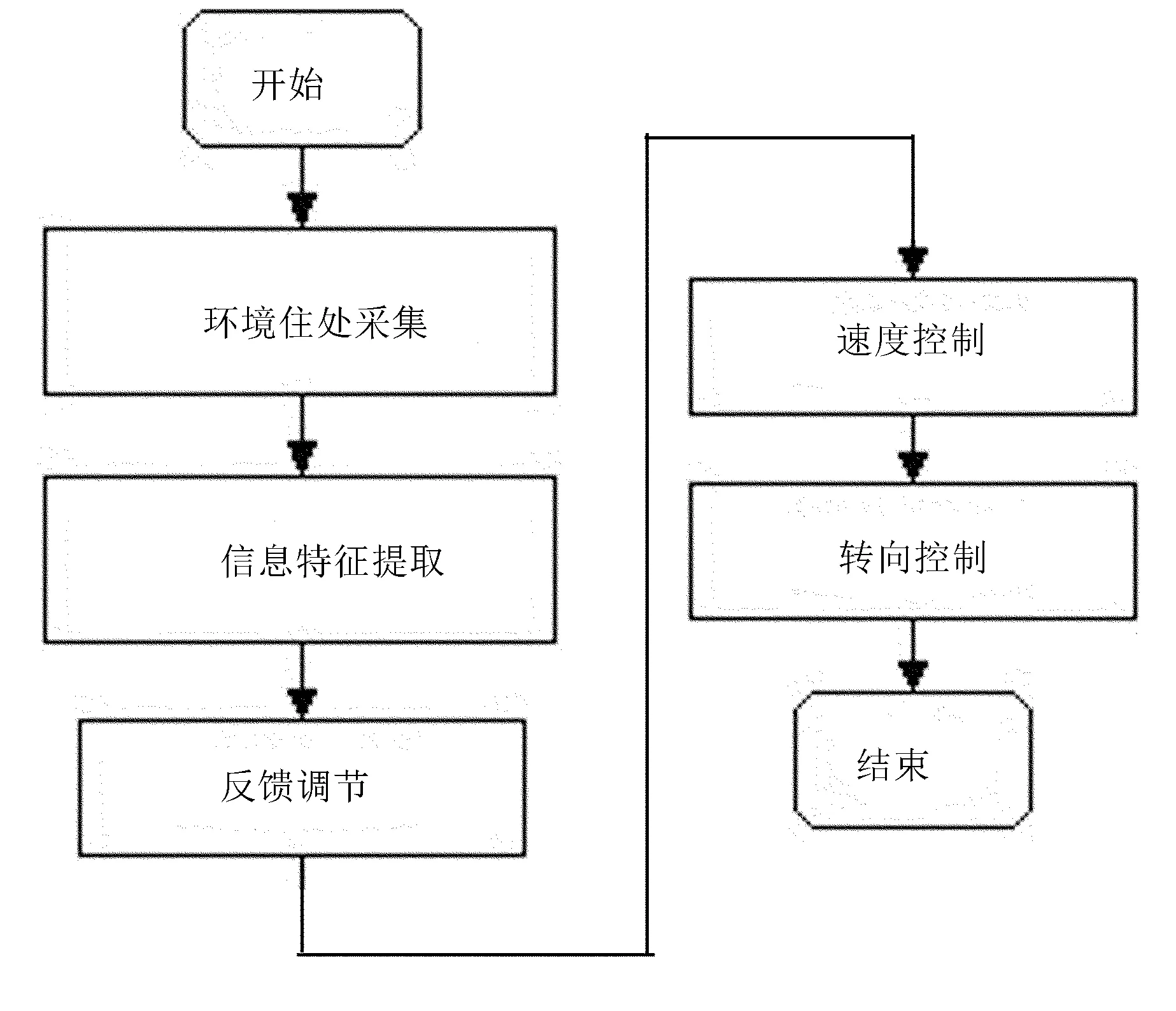
图4 播种机反馈调节控制流程Fig.4 The feedback regulation control flow of sowing machine
在进行反馈调节控制时,可以利用摄像机和传感器装置对环境信息和播种机转速信息进行采集,然后对特征数据进行提取,将数据和设定的阈值进行对比,最后进行速度和转向的调控。模糊控制系统硬件框架如图5所示。
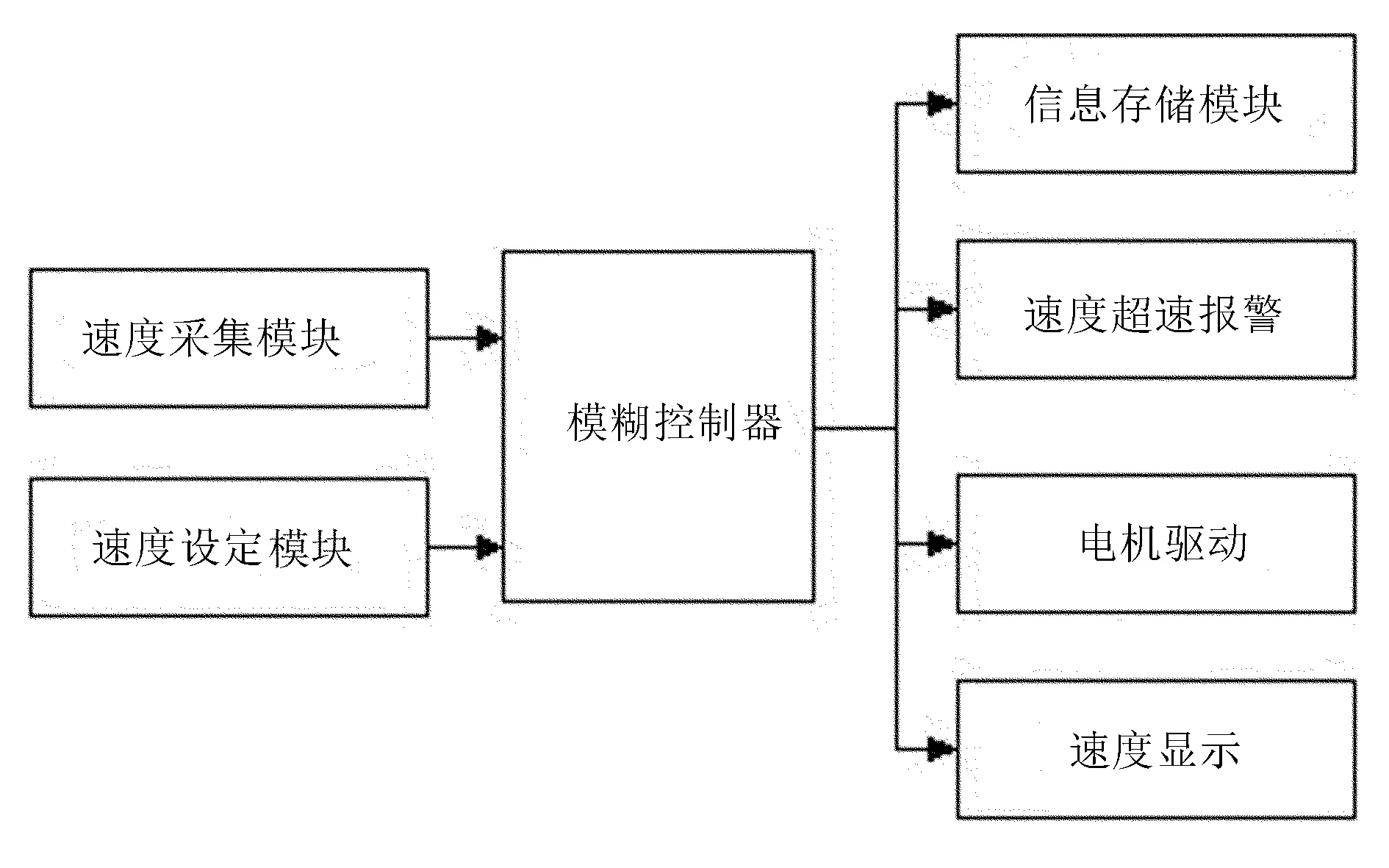
图5 模糊控制系统硬件框架Fig.5 The hardware framework of fuzzy control system
模糊控制器系统主要是对速度的采集和对电机进行驱动,通过对电机的驱动实现速度的调控,并利用PWM脉冲信号实现左右轮的差速转向功能。
3 播种机模糊自动控制反馈调节系统测试
播种机模糊控制反馈调节系统的功能测试可以通过无人驾驶拖拉机的测试过程实现,将模糊控制器安装在播种机上后,通过速度信号检测和自动转向准确性测试,验证模糊控制系统的可靠性,如图6所示。
在播种机速度反馈调节和自动转向的过程中,速度量和转向角度量的检测非常重要,这也是模糊控制的基础,本次通过光栅码盘对速度和角度量进行反馈调节。模糊控制系统结构如图7所示。

图6 播种机模糊控制系统测试Fig.6 The planter test of the fuzzy control system

图7 速度模糊控制器系统结构Fig.7 The system structure of speed fuzzy controller
小车转角的大小和PWM值是对应的。根据播种机的作业经验,当播种机直行时,可以让播种机以加高的速度进行形式;当播种机进入转弯过程中,需要降低速度,并控制轮子的差速比例。如果播种机以较高的速度进入到转弯过程,则需要播种机降速。根据以上控制规则,总结的模糊规则表如表1所示。

表1 模糊控制规则表Table 1 The rule table of fuzzy control
将模糊控制规则表利用编程的方式嵌入到硬件控制系统中,利用模糊控制可以提高控制的效率。为了测试模糊控制器的有效性,对响应时间进行了测试,结果如表2所示。
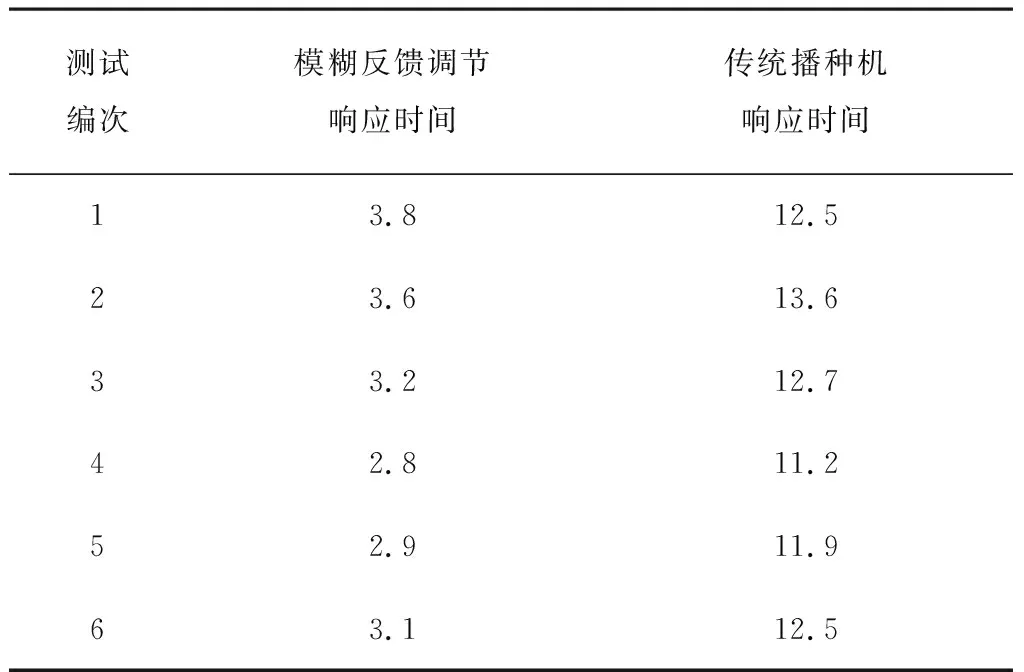
表2 模糊反馈调节播种机自动控制相应时间测试Table 2 The corresponding time test of automatic control of the fuzzy feedback control seeder ms
测试结果表明:采用模糊控制系统后,播种机的响应速度明显变快,从而验证了模糊反馈系统的有效性。为了进一步验证系统的可靠性,对自动控制转向的准确度进行了测试,得到了如表3所示的结果。
测试结果表明:该控制系统的控制精确度较高,可以满足播种机作业需求,但要实现真正的无人驾驶,还需要对控制系统进一步改善,以提高控制精度。
4 结论
为了实现播种机的无人化作业,对播种机的速度和转向自动调节过程进行了深入的研究,并将模糊控制和反馈调节系统引入到了播种机的控制系统中,从而实现了播种机速度和转向的自动化调节。对模糊控制和反馈调节系统进行了测试,结果表明:采用模糊和PID反馈调节后,播种机速度和转向控制系统的响应速度有了明显的提高,控制准确性较高。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
农业技术与装备(2021年3期)2021-12-01
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
成都信息工程大学学报(2021年6期)2021-02-12
今日农业(2020年22期)2020-12-14
——编码器
演艺科技(2020年7期)2020-08-13
电子制作(2019年16期)2019-09-27
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01