含有可测扰动多变量动态矩阵控制算法仿真研究
2020-05-19 08:51臧春华孙文博
山东化工 2020年7期
臧春华,孙文博
(沈阳化工大学 信息工程学院,辽宁 沈阳 110142)
随着工业的发展,传统PID控制已经满足不了工业生产的需求,DMC算法应运而生,现在许多公司已经将DMC算法做成软件,应用到工业各个领域。
目前,许多专家学者已经对DMC算法理论方面进行了深入研究,其中,陈立等[1]提出了一种新的DMC控制算法,即用遗传算法对DMC的设计参数进行在线寻优,由优化结果来实际控制作用。郭伟等[2]提出了一种状态等式约束DMC算法。余世明等[3]针对快计算速动态过程与低维非方多变量系统,提出了一种多变量约束快速动态矩阵控制算法。彭辉等[4]提出了一种适用于过阻尼对象的自校正动态矩阵控制的改进算法。Gattu等[5]针对非线性过程模型,提出了状态估计的二次动态矩阵控制。Aufderheide B等[6]扩展动态矩阵控制来处理不同的工作状态和抑制参数扰动。Zafiriou E等[7]研究了在二次动态矩阵控制求解的在线优化问题中,约束对系统稳定性的影响。Zhao Z等[8]提出了一种基于多操作模型的非线性动态矩阵控制算法。Morshedi A M等[9]说明了LDMC在任何复杂线性动态系统中的应用。
也有许多专家学者在应用实践方面做了大量研究,将DMC算法应用到实际各个领域,张俊卿等[10]将动态矩阵控制应用在重介选煤工艺中。王睿敏等[11]实现永磁同步电机矢量动态矩阵控制。胡怀中等[12]对主蒸汽温度实行动态矩阵控制。王大勇等[13]将动态矩阵控制应用在三级液位系统中。
本文以石油重油分馏模型为例,通过仿真实验,证明了应用含有可测扰动预测模型的DMC算法预测值能更好的追踪设定值,从而可以减少可测扰动对模型的影响。
1 传统DMC算法基本组成
1.1 预测模型
由于DMC算法是一种基于阶跃响应系数模型的控制算法,所以我们首先要获得过程的阶跃响应系数模型,现在常用的阶跃响应系数模型为
(1)
其中
(2)
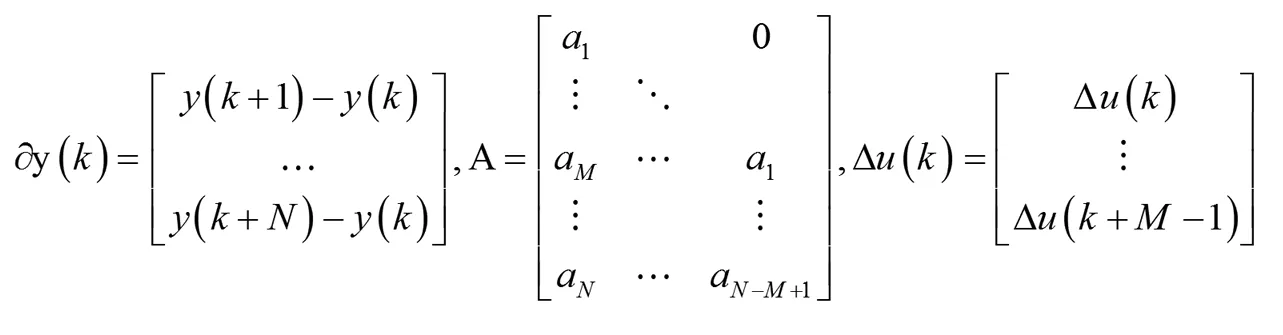
根据式1,当前和未来时刻控制作用发生变化时,未来P个时刻的模型输出预测值写成向量模式可以表述为:

(3)
其中

(4)

1.2 滚动优化
利用预测模型,我们可以在未来控制输入已知的情况下计算出未来的输出,同样也可以在未来输出已知情况下得到未来控制输入,我们做控制系统往往希望得到的预测输出值越接近设定值越好,如果已知A是方阵且可逆,那么我们可以求解(2)式方程得到使预测输出和设定值之间误差最小的ΔuM,但是我们往往不能保证A矩阵是方阵,所以我们可以利用最小二乘法,使预测输出和设定值之间的差值最小,具体可以极小化如下性能指标:

(5)
通过极值必然条件得到ΔuM。
1.3 反馈校正


(6)
这一信息反映了模型中不确定因素对输出的影响,可以用来预测输出误差,进而修正基于模型的预测。
2 处理可测扰动的DMC算法
一般工业过程的输入分为两类,一类是控制输入,另一类是不可控输入,它包含了可测扰动或不可测扰动。我们做控制往往希望可以克服不可控输入对系统的影响,并且使对象的输出有我们期望的动态特性,对于不可测扰动,我们一般不好进行调整,但对于变化规律已知的,假设扰动到输出的模型已知的条件下,我们可以通过前馈加以补偿。
首先假设过程输出对可测扰动v的阶跃响应系数模型{bi}是已知的,我们一般只能得到当前时刻v(k)构成的Δv(k),但却得不到未来的v(k+1),v(k+2),…,所以只能对当前时刻的扰动进行未来输出的预测,相应的预测模型为

(7)
预测模型式(7)的本质是假设v(k)保持不变,就实际工业过程不可能保证v(k)保持不变,因此建立在这一模型基础下的控制的最优特性可能会受影响,但是这一控制率仍然好于不加bΔu(k)项的优化。
3 仿真
这一节中,通过仿真实验对比两种DMC算法,证明预测模型中加入bΔu(k)项能减少可测扰动对系统的影响,仿真的对象是石油重油分馏模型,具有很好代表性。
其过程模型如下
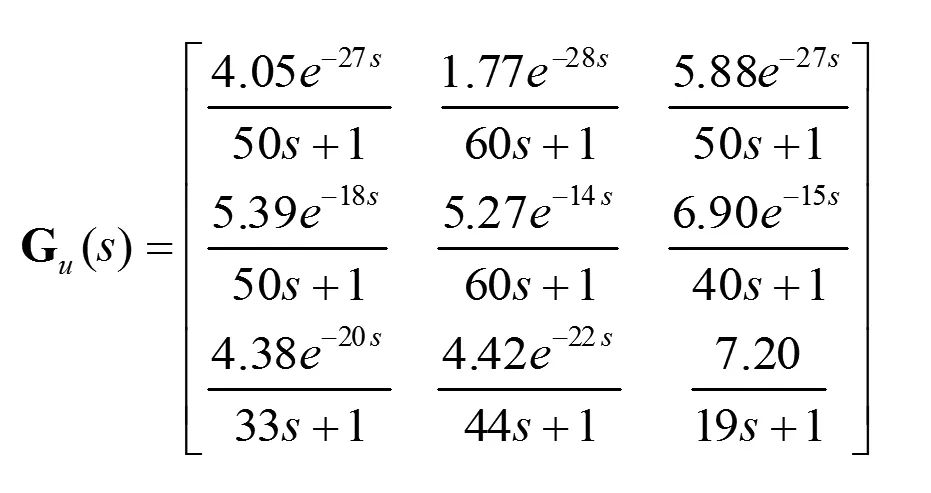
(8)
假设扰动模型为

(9)
通过对比发现传统DMC算法在K=300到K=500时刻预测输出值与设定值之间存在比较大的误差,改进后的DMC算法在K=300到K=500时刻预测输出值能比较好的跟踪设定值。我们可以看出来在预测模型中增加bΔu(k)项,有比较好的控制率。

图1 传统DMC算法
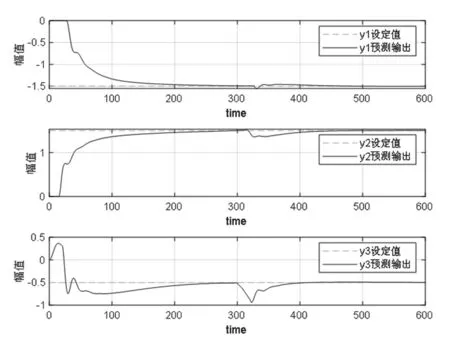
图2 改进后DMC算法
4 结论
本文针对传统DMC算法不能很好的解决可测扰动的问题,大致介绍了传统DMC算法的基本组成,并针对可测扰动这一问题,应用一种加入可测扰动的预测模型,通过仿真实验,证明了改进后的DMC算法在抑制可测扰动方面优于传统DMC算法。
猜你喜欢
湖北农机化(2021年7期)2021-12-07
天津教育·下(2018年9期)2018-07-13
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
自动化仪表(2017年8期)2017-08-30
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01