
基于改进磁链法永磁曳引机磁场分析和电感计算
2020-08-01 09:33杜建民于占洋
微电机 2020年7期
贾 儒,杜建民,于占洋, 李 岩
(沈阳工业大学 特种电机研究所,沈阳110870)
0 引 言
电感作为无齿轮永磁同步曳引机设计与控制的重要参数,国内外学者进行了多年的研究,常见的计算方法有能量摄动法和磁链法等。但是能量摄动法只考虑了导线内部空间储存的磁场能量,并没有包含在导线外部闭合的磁链。传统的磁链法分析电机的绕组电感都是从电机的磁场分布入手。由于定子齿槽效应的影响使得求解的过程中过多的采用了近似和假设,使得电机的磁场分布不能被准确计算,进而影响电感的计算精度[1-2]。文献[3-4]分析了闭口槽电机的磁场分布,但是无法应用于开口槽电机计算。
本文提出一种比上述方法更准确的计算方法。它更广泛地利用共形变换特性。最后,通过解析计算结果与实验测量法结果对比,验证方法的有效性。
1 曳引机主要参数
该曳引机电机额定功率为16.8kW,定子采用平底槽,主要参数如表1所示。电机模型如图1所示。

表1 表贴式永磁电机参数

图1 电机模型示意图
2 电枢磁场计算
文献[5]使用共形变换的方法对电机的磁场进行了分析,但是都采用了四次变换,同时依赖于无槽磁密分布的已知结果。本文将根据实验电机的具体特点以及简化方法,采用三步共性变换求解电枢产生的磁场。
本文首先假设电机为无限槽深,因此,三次共形变换的计算过程示意如图2所示。首先,通过共性变换得到T平面导体的标量磁位。S面槽模型的示意图见图3。其中,θ为计算范围,θ1和θ2分别为槽开口的两个边,Rs和Rr分别为电机的定子外径和转子内径。

图2 电枢磁场共形变换

图3 S平面无限槽深模型
K平面中,当p达到最大值-NaIp时,(Na为每槽导体数),令w=1,I为单位电流。如图4所示。

图4 K平面导体标量磁位
(1)
其中,Bak=Bakq+jBakp,Bak为K平面的磁通密度,Bakq和Bakp分别为Bak在q轴和p轴上的分量。
共形变换的过程如下:
(2)
(3)
(4)

(5)
将K平面转化到S平面
(6)
根据已求得的Bak可求得S平面内的q-p坐标系下的磁通密度Basω如下:
(7)
其中,式(7)括号中相乘部分可被视为K域到S域的磁导率记作λ,*表示取共轭运算,Baswq和Baswp分别为Basω的沿轴的分量。式中,λ为一个复数,所以可以表示为
λ=λa+jλb
(8)
Re(λ)=λa为λ的实部,Im(λ)=λb为λ的虚部。其计算结果如图5和图6所示。

图5 复相对磁导率实部

图6 复相对磁导率虚部
由无槽气隙电枢磁密Basw计算开槽线圈磁密Basz:
Basz=Baswλ*=(Baswr+jBaswθ)(λa-jλb)=Baszr+jBaszθ
(9)
式中,Baszr、Baszθ分别为线圈磁密的径向分量和切向分量,λ*可视为该磁场在复数域的相对磁导率,且
(10)
将式(8)中Baszr和Baszθ即径向分量和切向分量用傅里叶分解为
(11)
式(11)中,Baszrn和Baszθn分别为Baszr和Baszθ的n次谐波分量。
电枢稀奇磁场磁密为各线圈磁密叠加之和,即Basyφ。
(12)
式中,Baszφr和Baszφq分别为电枢磁场气隙磁通密度径向分量和切向分量;i为绕组线圈对应序号;Nm为每相总线圈数,Nm=Qs/3;iA(t)、iB(t)、iC(t)为三相线圈电流瞬时值;αAi、αBi、αCi为三相初始相位角。
本文分析了一台外转子永磁曳引同步电机。该电机采用双层绕组。在有限元分析中,采用静态场模式,设某相电流为额定电流峰值,其余两项为该相的百分之五十。采用式(10)求得的解析结果与上述有限元结果进行对比。如图7,数值计算的结果与仿真吻合度较高。

图7 电枢磁通密度模值
3 改进磁链法电感的计算
3.1 漏感的计算
由于表贴式电机的结构原因,该电机的漏感可以占到电机的总电感的40%。
在文献[6]中有对电机漏感的计算,其表示形式可如下:
(13)
其中,
(14)
式中,ds为平底槽的最大深度,bs为平底槽底部宽度,b0为槽开口,如图8所示。
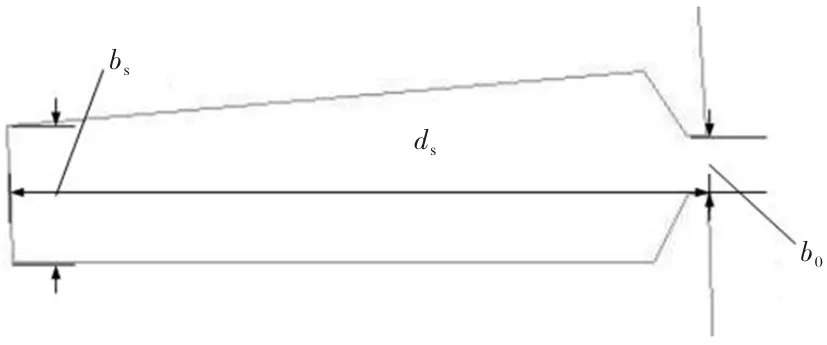
图8 槽型示意图
3.2 气隙电感的计算
假设模型电机的磁导率无限大。电机在旋转过程中,定转子的相对位置会发生变化,因而会影响磁路变化。根据文献[7]电机的自感和互感是相对位置角度θ的函数。通过计算电机在不同位置时磁场的分布,进而得到电机绕组的电感。电机各相的自感分别为LAA(θ)、LBB(θ)、LCC(θ);各相绕组的互感分别为MAB(θ)=MBA(θ)、MBC(θ)=MCB(θ)、MAC(θ)=MCA(θ)。
由文献[4]可知A相基波气隙磁场为
(15)
式中,leff为电机的有效长度(m),Na为A相绕组因数,a为并联支路数,Basyφ为A相电流产生的气隙磁密,θ为转子位置角度。其表达式如下:
Basyφ=Basyφr+jBasyφθ
(16)
(17)
根据文献[8]则A相自感和AB相互感为
(18)
(19)
式中,LAA为A相自感,MAB为AB相互感,同理将转子位置角(θ-2π/3)替换为(θ-2π/3)和(θ-4π/3)即可求得B、C两相的电感。
此外,本方法对数值方法有着较高的要求,由于计算量大同时对计算精度要求又高,需要采用两者兼顾的算法进行求解。

图9 A相电感

图10 A相与B相互感
3.3 交直轴变换
由文献[9-10]结合本文电机的结构特点,模型电机的三相磁链与相电流的表达式为
(20)
式中,ψa、ψb、ψc为a、b、c三相绕组产生的磁链;ψfa、ψfb、ψfc为永磁体与a、b、c相绕组产生的磁链;Ia、Ib、Ic为a、b、c各相的电流。
在恒功率的条件下,abc轴向dq轴的坐标变换为
(21)
式中,ψA、ψB、ψC为a、b、c相绕组总磁链
(22)
将式(20)代入到式(19)中,得
(23)
因而,静态坐标系下的电感矩阵为
Ldq=CTLabcC
(24)
计算结果见表2。

表2 实验结果与计算结果对比
4 计算结果与实验验证
无齿轮曳引机样机实物图,如图11所示。利用LCR电感测试仪法对绕组电感参数进行测量。考虑到电机的额定工作状态并为使得磁路饱和,并且本电机额定转速低的特点,所以本实验采用低速测量代替负载状态测量。这样既保证了实验结果的准确性,又避免了由于额定状态下外电压以及反电势对LCR电感测试仪的破坏。
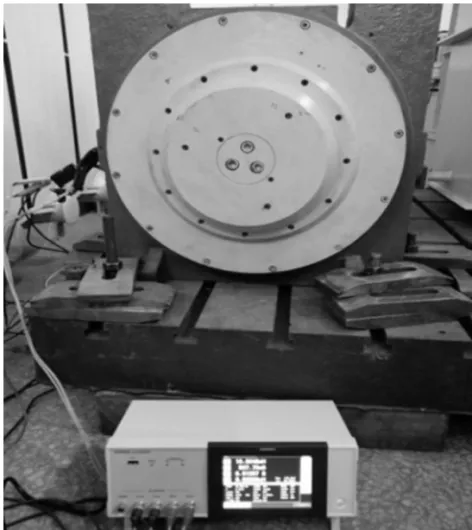
图11 样机试验验证
本文给样机加10A的不饱和电流对样机在低速运行状态电感参数进行了实验测量。根据实验结果给出了样机实验测量结果,如表2所示。并与解析计算结果进行对比。误差在允许范围内,证明了本方法的正确性。
5 结 论
本文首先对电机的几何模型进行了场域的变换分析了二维磁场分布,并推导出来该电机的复相对磁导率。然后,本文根据电机特点对电机的电感参数进行了求解。最后,采用实验测量法对电机的电感进行了测量,与数值法的结果进行比较,验证方法的准确性。采用共性变换法对电机的结构进行分析,比文献中已有方法更为严谨。然而,本方法也受到数值问题的影响,问题主要集中在齿尖附近具有无穷大磁通密度的奇点的出现。上述问题需要通过共形映射的映像来解决。在所研究的情况下与实验结果对比吻合度较高。证明了本文对电机的设计与控制有一定理论意义和实践价值,为电感的计算提出了一条新路径。
猜你喜欢
微电机(2022年8期)2022-10-12
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
传感器与微系统(2022年3期)2022-03-23
时代汽车(2021年6期)2021-04-09
时代汽车(2021年5期)2021-04-06
防爆电机(2020年4期)2020-12-14
弹箭与制导学报(2020年1期)2020-07-09
微特电机(2019年7期)2019-08-02
弹箭与制导学报(2019年6期)2019-06-24
