
储能式有轨电车的永磁同步电机控制策略优化
2020-08-01 09:33杨高兴张瑞峰詹哲军柴璐军
微电机 2020年7期
杨高兴,张瑞峰,2,路 瑶,詹哲军,柴璐军
(1.中车永济电机有限公司 技术中心,西安 710016;2. 西安理工大学 自动化学院,西安 710048)
0 引 言
目前,在永磁同步电机方面的控制策略较多,如负直轴电流补偿法控制、直轴电流分量等于零控制、梯度下降法控制和功角控制法等[1-3],以及文献[4]提出的定交轴电压给定法弱磁控制,实现了对永磁同步电机的控制,但多数常以转速为控制目标,或者存在电压利用率不充分等缺点。
本文根据以上控制方法的特点和有轨电车的车体惯量大、运行路况复杂多变、爬坡能力要求高以及对直流电压利用率要求高的特点,提出一种适用于该车辆行驶工况的以转矩为控制目标的优化控制策略,采用最大转矩电流比MTPA控制和一种较新颖的优化弱磁控制相结合的方法,提高变流器直流侧电压利用率与电机负载能力,降低电机损耗,使电机获得较好的控制性能和牵引续航能力而更具优势。
1 永磁同步电机的数学模型及工作特性
1.1 永磁同步电机的数学模型
在凸极式永磁同步电机进入稳态运行时的电压方程如下式
ud=Rsid-ωrLqiq
(1)
uq=Rsiq+ωr(Ldid+ψf)
(2)
式中,ud,uq为定子终端电压的直轴与交轴分量;id,iq为定子电流的直轴与交轴分量;Lq,Ld为电机交直轴电感;Rs为电机定子内阻;ωr为电机电角速度;ψf为永磁体磁链。
永磁同步电机的运行受到电压型牵引变流器输出能力的限制。其中一方面受电压矢量幅值限制,电压矢量最大值usmax,另一方面受电流幅值限制,设其最大值为ismax;永磁同步电机的工作状态满足以下方程:
(3)
(4)
式(3)、式(4)分别为永磁同步电机的电压极限方程和电流极限方程。
在高速运行时,其Rs上的压降可以忽略不计,由以上公式可得到在以定子dq电流坐标轴平面内的电压极限椭圆方程:
(5)
永磁同步电机的电磁转矩用Te表示,其方程为
(6)
式中,np表示电机极对数。
1.2 永磁同步电机的工作特性
在基速以下恒转矩区,存在一个工作点使电机在输出相同的转矩下定子电流幅值最小,可以减小电机运行中的铜耗,提高逆变器效率,降低系统能量损耗。这些不同电流圆与对应的电机恒转矩曲线的切点所组成的曲线即为最大转矩电流比MTPA曲线。
根据式(6)和式(4),求得最大转矩条件极值,可得MTPA控制下直交轴电流之间的关系为
(7)
当永磁同步电机进入高速区控制时,存在一个区域使得电机能够在当前转速下输出最大扭矩,即最大转矩/电压比控制;其求解也可转化为极值函数问题,由式(5)和式(6)可得定子电流的交直轴分量在dq轴坐标系下的关系曲线即为MTPV曲线,其表达式为

(8)
根据式(4)和式(5)以及MTPA和MTPV曲线围成的电机工作区域如图1所示。在满足MTPA、MTPV、电压极限椭圆和电流极限圆限制的条件下,永磁同步电机在牵引工况下的最优工作点如图1中OABC区域。
2 有轨电车的永磁同步电机电流轨迹规划
有轨电车在行驶过程中,驾驶员通过改变牵引加速踏板行程来同时控制2台永磁同步电机运行,以获得相应的转速和动力输出。电机的最大转矩外特性曲线给出了电机在不同转速下可输出的最大转矩。
根据有轨电车牵引系统要求,将永磁同步电机的最大转矩外特性曲线定义为满转矩Tmax运行曲线;将牵引踏板信号分成8个档位,每个档位代表不同的转矩Te输出;根据电机运行的不同工况优化定子电流轨迹。

图1 d-q平面内的永磁同步电机工作区域图
图2为永磁同步电机优化控制设计电流轨迹图,OA段表示在不同扭矩给定下的恒转矩MTPA控制运行轨迹点集合;BC段表示最大转矩电压比MTPV的轨迹实际上是电压极限椭圆与恒转矩曲线切点的连线。
如图2所示,当给定满转矩Tmax时,在基速以下,采用MTPA控制运行于A点,若要在基速以上运行时,由于受到牵引系统容量限制,则需要进行弱磁控制来规划电流轨迹,运行点由A点沿电流极限圆向B点移动,转速升高;若要转速继续升高,则由B点沿MTPV曲线向C点移动。

图2 永磁同步电机电流轨迹规划图
当电机以非满转矩Te1工作时,例如图中A1点所示采用MTPA控制,当电机需要弱磁升速时,为了保持恒定的扭矩Te1输出,则加大弱磁电流,工作点沿恒转矩曲线由A1点向B1点移动,B1点代表在恒定扭矩Te1下可以达到的最大电机转速,当此时电机仍需要增加转速时,则电机已不能在保持转矩不变的条件下继续弱磁升速。根据上述分析, 电机应沿MTPV曲线向C点运行, 其代价是转矩的降低。
3 有轨电车的永磁同步电机控制算法优化与实现
根据该有轨电车的运行需求特点,本设计中电机控制在MTPA阶段和恒扭矩弱磁阶段运行。
3.1 恒转矩区MTPA控制实现

3.2 优化弱磁控制算法实现
将优化弱磁控制与最大转矩电流比(MTPA)控制构成的永磁同步电机优化控制框图表示如图3所示。
在图3中,恒转矩MTPA控制由两个电流环构成,转矩给定值通过MTPA电流规划方式得到直交轴电流给定,直交轴电流给定和反馈构成电流闭环调节跟踪,实现对电机运行的精确控制;而在优化弱磁控制中,则通过饱和电压与前馈电压之差来对MTPA计算的直轴电流进行修正后,作为直轴电流参考给定,然后和直轴电流反馈构成单电流调节部分,电流调节器输出的直轴电压给定值根据电机的实际转速和负载转矩而变化,使得电机的交轴电压也随之变化,从而使永磁同步电机的弱磁控制性能得到提高。

图3 永磁同步电机优化控制框图
由式(2)可得iq与uq和id之间的关系为
(9)


图4 优化弱磁控制的电流轨迹
由于电压椭圆上的点满足公式
(10)
在该控制方法中,直轴电压ud是通过唯一单电流环调节得到,则电机交轴电压uq的给定为公式
(11)
即满足电机电流矢量末端在电压极限椭圆上[5]。
由于电机交轴电压给定值不是一个固定的数值,是根据实际的电机转速和负载转矩调节得的,它的变化范围是0到usmax,所以在负载转矩发生变化时,电机交轴电压也相应改变以适应转矩的变化,输出与负载转矩相对应的电磁转矩。
在弱磁控制时加入电流修正值模块,即饱和电压矢量usmax与前馈电压信号us进行比较可以得到:
Δu=usmax-us
(12)
当前馈输出电压达到饱和,Δu<0时,通过调节器输出,可以对直轴电流给定进行修正,起到优化弱磁下的直轴电流调节作用。
优化弱磁控制方法解决了因永磁同步电机转速升高而使电机交直轴电流耦合加强导致永磁同步电机控制效果变差的问题,具有结构简单易于实现,动态响应快,参数鲁棒性好等优点。同时,优化弱磁控制方法能够对电机直流电压充分利用,使电机工作在最优工作点,提高了电机的效率和带载能力。
3.3 两种控制的切换策略
本设计中的优化弱磁控制方案满足永磁同步电机在弱磁区控制的需求。然而在低速时,电压限制椭圆上的工作点定子电流幅值大而效率低,适合MTPA控制策略。所以需要在MTPA控制和弱磁控制间进行切换。
根据对永磁同步电机弱磁控制的分析可知,当电机电压合成矢量幅值us达到最大值usmax时,继续升高电机转速则需要对电机进行弱磁控制。因此,根据实时计算电机交直轴电压得到电机电压合成矢量幅值us,当us小于usmax时,电机釆用MTPA控制;当连续10次检测到us大于等于usmax时,电机进入优化弱磁控制方式。
4 实验验证
中车四方机车车辆有限公司研制的超级电容储能式胶轮有轨电车,整车由弓网经高压箱或者由超级电容提供750V直流电源;一台车辆设计有2套牵引变流器,各控制一台4对极凸极式永磁同步电机,2台牵引变流器都有各自的控制单元,可以同时运行且相互独立。图5为该有轨电车牵引系统原理框图。根据该牵引控制系统的特点,可以设计两套完全相同的牵引变流器控制算法用于控制。

图5 超级电容储能式胶轮有轨电车牵引系统原理框图
以青岛超级电容储能式胶轮有轨电车为控制对象,对牵引控制算法进行研究与验证。控制单元硬件采用DSP28335+FPGA的架构,牵引变流器采用了IGBT的两电平的拓扑结构。永磁同步电机参数如表1所示。

表1 永磁同步电机的参数
在电机运行过程中,电压矢量幅值随电机转速逐渐增大,在进入弱磁区域后一直维持在最大值,满足式(10),可见逆变器直流侧电压得到了充分的利用,分析结果得到了验证,如图6所示。

图6 永磁同步电机运行过程中电压矢量幅值变化波形
永磁同步电机在MTPA和优化弱磁控制下的电压、电流波形比较平稳,无震荡;当弱磁标志Flag_wk由低变高时,控制策略由MTPA控制切换到弱磁控制;当弱磁标志Flag_wk由高变低时,控制策略由弱磁控制切换到MTPA控制;录波仪记录其波形如图7所示。


图7 MTPA控制和弱磁控制切换时的电压、电流
从图8可以看出:线电压基波频率为125.5 Hz,基波电压峰值值为786.5 V,总谐波(THD)为36.52%;电机相电流基波频率为125.5 Hz,电流有效值为407.5 A,总谐波(THD)为12.52%。


图8 弱磁控制中的电压和电流谐波含量分析
根据超级电容储能式有轨电车要求,牵引下电机电压、电流波形平滑,电机转速平稳上升到最大转速,没有出现电机震动现象,图9表示的是2台牵引电机同时运行的测试波形,具体波形如图9所示。
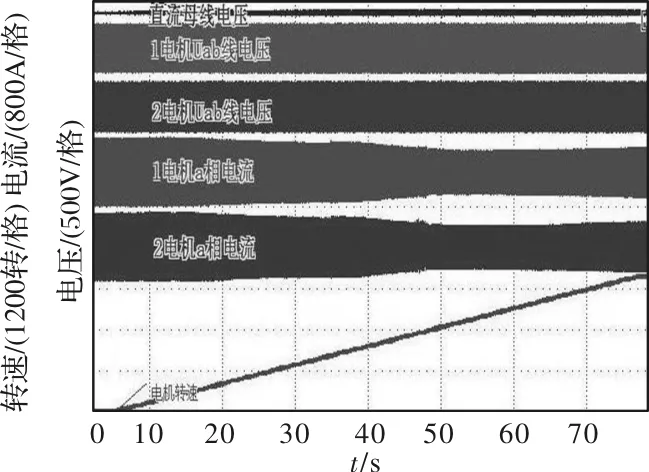
图9 有轨电车牵引满载运行时2台电机的电压、电流及转速波形
有轨电车在普通牵引模式下满载牵引运行时电机由0到4400 r/min的给定转矩、电机输出转矩和转速对应波形如图10所示,图中纵坐标轴表示扭矩,横坐标表示电机转速。结果表明在速度设计范围内给定转矩和电机输出转矩误差都在5%以内,完全满足超级电容储能式有轨电车牵引转矩设计要求。

图10 电机满载牵引转矩和转速对应波形
5 结 语
本文设计的永磁同步电机优化控制策略,满足有轨电车牵引控制各个复杂工况的运行要求,通过了超级电容储能式胶轮有轨电车的各项实际试验。目前,装配有本文所研制的牵引控制系统的超级电容储能式胶轮有轨电车已达到10余辆,且都已完成3000 km运行考核,运行状态良好,充分验证了控制策略的可行性、可靠性和适用性。
猜你喜欢
振动与冲击(2022年22期)2022-12-01
防爆电机(2022年4期)2022-08-17
装备维修技术(2022年7期)2022-07-01
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
中国新技术新产品(2018年22期)2018-01-05
