
含松弛因子的迭代学习控制永磁同步电机转矩波动抑制
2020-08-01 09:18陈家璘隋璐捷谢文武
微电机 2020年7期
赵 婷,陈家璘,曾 铮,隋璐捷,谢文武
(1.国网湖北省电力有限公司信息通信公司,武汉 430079;2.湖南理工学院 信息科学与工程学院,湖南 岳阳 414006)
0 引 言
永磁同步电机具有结构简单、效率高、功率密度大等优点,被广泛应用于工业生产中[1]。然而永磁同步电机系统存在转子磁链谐波、齿槽转矩和逆变器死区效应等非线性因素,造成电机的转矩波动较大,进而引起明显的转速波动[2]。
永磁同步电机的转矩波动抑制方法大体可分为两类,第一类是从电机设计结构及参数上来改进电机性能,这类方法会提高电机的制造成本[3-5]。第二类则通过改进电机的控制方式来抑制转矩波动,又可分为开环方式和闭环方式两种。开环方式对电机参数精度要求高,且离线计算量较大,其改进效果有限[6-7]。采用闭环方式抑制转矩波动则能达到更好的效果。例如文献[8]基于不同次数的转矩谐波与相应电流谐波的数量关系,经过反馈计算,最终得到最优电流值;文献[9]基于电机的状态空间模型,利用龙贝格观测器实现对转矩谐波的有效观测,并在此基础上进行转矩补偿;文献[10]通过补偿参考电压实现对转矩波动的抑制,并采用自适应内模电流控制器实现鲁棒电流控制。
由于转矩波动具有与转速成固定关系的周期性,采用迭代学习控制(ILC)策略来实现永磁同步电机的控制,可以达到抑制转矩波动的目的[11-14]。针对永磁同步电机转矩波动较大的问题,本文提出含有松弛因子的反馈型迭代学习控制策略来抑制转矩波动。文中在ILC学习率中引入松弛因子 改善非周期性扰动的累积问题,利用奈圭斯特稳定判据在频域对迭代学习控制系统进行稳定性分析,并在此基础上给出控制参数的整定方法。
1 永磁同步电机数学模型
忽略磁路饱和及涡流和磁滞损耗等的影响,永磁同步电机在d-q轴同步旋转坐标系下的电压方程为
(1)
其中
(2)
式中,ud和uq为定子电压d、q轴分量;id和iq为定子电流d、q轴分量;R为定子电阻;Ld和Lq分别及d、q轴等效电感;ωr为转子机械角速度;ψf为永磁磁链;p为极对数。转矩方程为
(3)
运动方程为
(4)
式中,J为转动惯量;Te和TL分别为电磁转矩和负载转矩;Bm为粘滞摩擦系数。
由于永磁电机控制系统中存在转子磁链谐波、齿槽转矩、死区效应等非理想因素,造成电机转矩的波动。传统的永磁同步电机矢量控制系统采用PI控制器,由于系统带宽的限制导致大部分谐波得不到有效控制。
2 PMSM迭代学习控制
2.1 迭代学习控制系统
迭代学习控制(Iterative Learning Control,ILC)的原理是根据上一个迭代周期的控制经验和控制系统的输出误差,并基于某种迭代学习率来计算当前周期的控制量,如此不断进行迭代,最终使被控对象达到期望的状态。常用的P型迭代学习率为
uj(t)=αuj-1(t)+GPej(t)
(5)
式中,j为迭代次数,uj(t)为控制信号,ej(t)为系统输出误差,Gp为学习系数;α为松弛因子,作用是削弱非周期扰动的累积效应,其中α=1或|α|<1。
当电机处于稳态时,ILC存储单元输出相对输入间隔一个迭代周期,因此可视为一个延时环节e。采用ILC的电机控制系统简化结构框图如图1所示。图中省略了d轴和q轴电流控制环,q轴电流控制环作为转速控制环的内环,在图1中简化为一个前向环节Gq(s)。
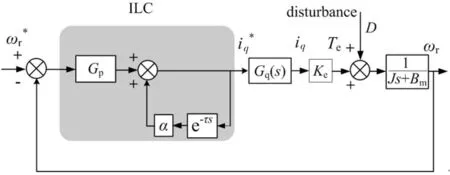
图1 ILC控制系统框图
2.2 稳定性分析与控制器参数整定
本文依据奈圭斯特稳定判据分析迭代学习控制系统的稳定性,并据此对ILC控制器参数进行整定。
由图1可得系统的开环传递函数为
(6)
其中,Gq(s)为q轴电流环的等效传递函数,电流环采用PI控制器时,通常将Gq(s)整定为一个单位惯性环节。由于电流环的时间常数远小于转速环的时间常数,因此在分析转速环时,可将Gq(s)近似当作1。将s=jω代入上式,并依据欧拉公式将e-jω展开,可计算得系统开环频率特性为
(7)
式中,A(ω)和φ(ω)分别为幅频特性和相频特性。
对于P型学习率,有
G1(s)=GP
(8)
图2给出了采用P型ILC时系统的开环对数频率特性曲线,电机参数在表1中给出,控制参数为α=0.9,GP=2.5,电机转速ωr=10 r/min。

图2 ILC控制系统开环频率特性
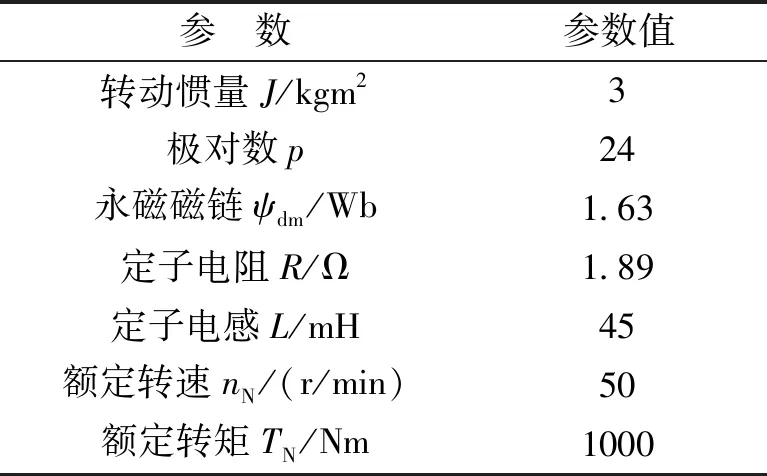
表1 电机参数
由于开环传递函数G(s)没有正实部极点,依据对数频率稳定判据,闭环系统稳定应满足L(ω)>0时φ(ω)穿越-180°的次数为0。图2中L(ω)>0时φ(ω)穿越越-180°次数为0,故闭环系统稳定。
记满足L(ω)=0的最大频率为ωc,max,满足φ(ω)=-180°的最小频率为ωx,min。当满足ωc,max<ωx,min时,可以保证闭环系统稳定。
由于GP的取值不影响相位频率特性曲线,可以先对 值进行整定。图3(a)~图3(c)分别给出了α为0.95、0.8、0.6时的系统开环对数频率特性曲线。由图可知,α值增大会导致ωx,min减小,ωc,max增大,从而限制增益系数GP的取值范围,稳定性降低。因此α值不能过大,通常可取在0.9附近。图3(a)给出了GP分别为10、2.5、0.5时的幅频特性曲线,GP越大ωc,max越大,稳定性降低。GP值可在满足ωc,max<ωx,min且留有一定裕度条件下取较大值。
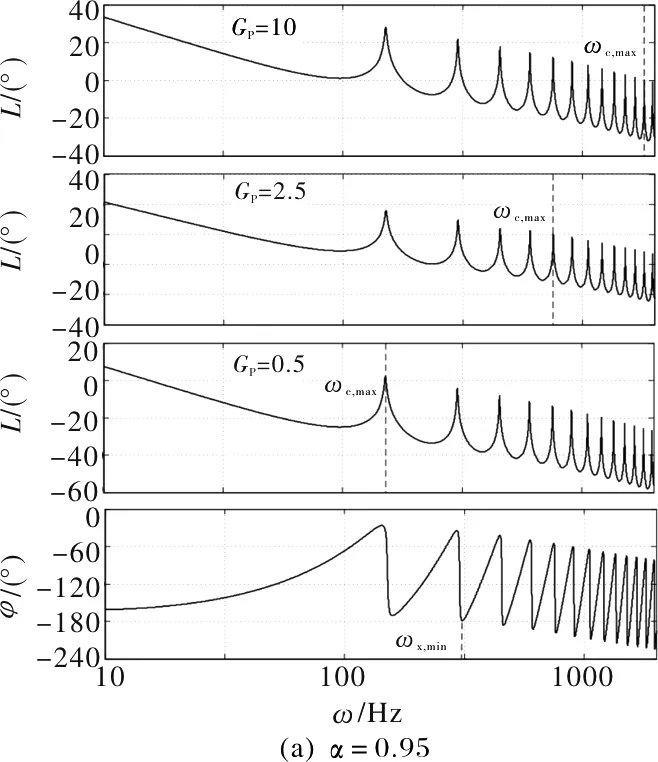

图3 系统开环频率特性
根据ILC各控制参数对转矩波动和系统稳定性的影响,可按以下步骤对参数进行整定。
第一步,整定α。由于α取值对转矩波动抑制作用明显,在保证系统稳定的前提下应在(0,1]范围内将 尽量取较大值。通常将 值取为0.9左右。
第二步,整定GP。通过选择GP的取值调整ωc,max,从而保证系统的稳定性。在系统稳定并留有一定裕量的前提下,可尽量取较大GP值。
3 仿真与实验验证
3.1 仿真验证
为了验证方法的有效性,在Matlab/Simulink环境下建立了PMSM矢量控制系统仿真模型。电机参数如表1所示。
图4(a)和图4(b)分别给出了采用PI控制器和迭代学习控制器时电机稳态运行的仿真结果。仿真中,电机参考转速为30 r/min,负载转矩为400 Nm。对比图4(a)和图4(b)可知,与PI控制器相比,采用ILC控制时,电机的转矩和转速的波动均明显得到了抑制,电流谐波也相应减小。


图4 稳态仿真波形
3.2 实验验证
为进一步验证本文ILC策略的可行性和有效性,在实验平台上进行了实验验证。实验中的被控电机参数与表1相同。变频器的功率电路的开关器件为三菱IPM模块,型号为PM75DSA120,功率器件的开关频率为5 kHz。控制电路的控制芯片为浮点型DSP,型号为TMS320F28335,控制系统的采样周期为100 μs。
实验中电机转矩值通过电机参数和定子电流测量结果按转矩方程式(3)估算得到。图5(a)和图5(b)分别给出了采用PI控制器和迭代学习控制器时电机稳态运行的转矩波形。实验中负载转矩为150 Nm。对比图5(a)和图5(b)可知,与PI控制器相比,采用ILC控制时,电机的转矩波动明显得到了抑制,证明了本文策略的有效性。

图5 转矩实验波形
4 结 语
本文针对永磁同步电机转矩波动的周期性特征,提出了基于迭代学习控制的转矩波动抑制策略,为了改善非周期性扰动的累积问题在ILC学习率中引入松弛因子,并分析了控制系统的稳定性,整定了控制器参数。仿真和实验结果验证了本文算法对转矩波动抑制的有效性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
电气电子教学学报(2022年3期)2022-07-30
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
燃料化学学报(2022年5期)2022-05-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
新课程·上旬(2020年3期)2020-08-07
