基于ABB机器人搬运任务的实操教学项目设计
2020-08-27 12:58谢琴常德技师学院
消费导刊 2020年33期
谢琴 常德技师学院
本人从事工业机器人教学工作已经有五年时间了,从一开始边摸索、边教学,到现在教学过程不断优化,过程辛苦但充实。
中职学校的学生普遍基础较差,不喜欢枯燥的理论讲解,更倾向于动手操作,老师在教学过程中要扬长避短,将理论知识通过任务的载体传送给学生,让学生在做中学,学中做,从而很好的掌握知识点和技能点。在教学过程中,我发现很多教材在讲授搬运任务时设计的教学任务简单,可选择性不多,不利于学生很好的掌握这一知识点。通过近五年的教学实践及带学生参加竞赛,我总结了以下几个搬运任务,供机器人专业教学的老师参考(以ABB机器人为例)。
一、一对一的简单搬运任务
任务要求:将左侧物料搬运到右侧放料台上,要求机器人动作流畅,效率高,抓取和放置位置准确,任务示意如图1:
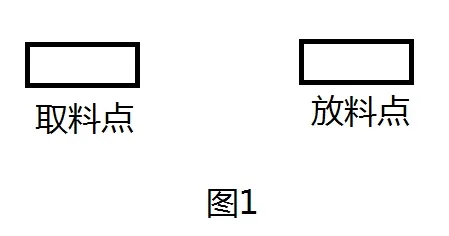
本任务将以下知识点和技能点糅合在一起:1.MOVEJ、MOVEL、MOVEABSJ、OFFS、WAITTIME、SET、RESET指令的用法;2.了解模块---例行程序---指令的相互关系;3.例行程序的编写;4.点位的调试;5.速度的选择;6.程序的调试。通过本任务的学习,学生对搬运动作的实现有了大致的认识,并且能实现简单的一对一的搬运控制。
二、加入条件判断的搬运任务
任务要求:当左侧传送带上物料到位(DI_01=1)时,机器人取料,通过手爪上的传感器(DI_02)检测是否取到物料,若取到料(DI_02=1),机器人放料;若未取到料(DI_02=0),则重新取料;如此反复循环。
本任务将条件判断IF指令、程序跳转指令和无限循环控制指令以及子程序的用法加入其中。
三、基础版多对多的搬运任务
任务要求:将左侧四个物料按照如图2所示的对应关系放置到右侧放料台上,要求机器人动作流畅,效率高,抓取和放置位置准确。

本任务在任务一的基础上增加了带参数的子程序的用法,运用带参数的子程序,可以大大缩短程序的长度。
四、基础版一对多的搬运任务
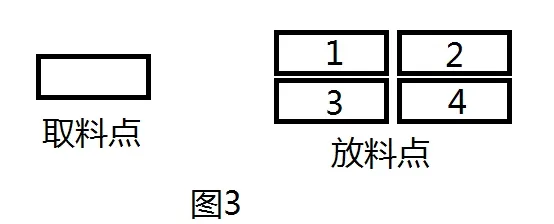
任务要求:将左侧传送带的物料搬运到右侧放料台中,如图3,当右侧放料台四个位置放满后,又重新从第一个位置开始放置。
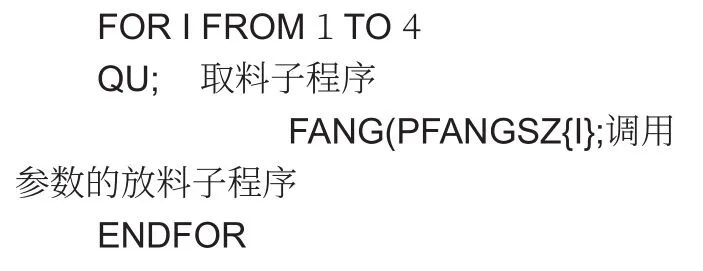
本任务在任务三的基础上可引申出数组的概念,将放料的四个点位创建成另一个数组(如:PFANGSZ{4}),再结合FOR循环指令即可实现控制要求,部分参考指令如下:
五、升级版一对多的搬运任务
任务要求:当左侧传送带上物料到位(DI_01=1)时,机器人取料,通过手爪上的传感器(DI_02)检测是否取到物料,若取到料(DI_02=1),机器人按照顺序分别放到放料台的四个位置,当四个位置均放置一遍后,又从放料台的第一个位置重新开始放置;若未取到料(DI_02=0),则重新取料;如此反复循环。
本任务在任务四的基础上融合了IF条件判断,WAIT等待指令,WHILE循环指令及带参数的子程序的用法。在该任务中,可详细讲解IF条件判断指令与WAIT等待指令区别以及WHILE循环指令与FOR循环指令的异同。
六、升级版多对多的搬运任务
任务要求:将左侧四个物料按照老师随意指定的顺序放置到右侧放料台上,要求机器人动作流畅,效率高,抓取和放置位置准确且老师改变指定顺序后,学生无需改变程序,只需简单的改变某些数据就能实现指定的控制要求。
本任务在任务三的基础上新增了数组的嵌套知识点,在编程前首先新建取料点数组(如:PQUSZ{4}),放料点数组(如:PFANGSZ{4})及数值数据类型的放料顺序数组(如:NSXSZ{4}),部分参考指令如下:
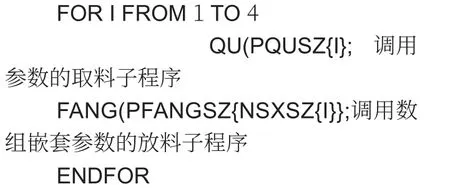
在本任务中如果开始制定放置的顺序是:1-2,2-4,3-1,4-3,则NSXSZ{4}={2,4,1,3 };若后来需要放置的顺序是1-3,2-1,3-4,4-2,主程序可以完全不用改变,只需要更改NSXSZ{4}中的值为{3,1,4,2 }即可,十分方便。
通过以上六个任务的逐层深入,学生对于知识点的掌握和理解程度不断加深,在上课过程中,为了达到更好的教学效果,老师在讲解每一任务后可以布置同类型的多个任务让学生进行知识和技能的巩固,以达到更好的教学效果。
猜你喜欢
机电工程技术(2023年1期)2023-02-24
电脑报(2022年13期)2022-04-12
科技创新与生产力(2020年11期)2020-11-19
科技创新与生产力(2020年10期)2020-10-13
电脑报(2020年24期)2020-07-15
林业调查规划(2017年6期)2017-03-27
印刷技术·包装装潢(2016年2期)2016-03-23
中国科技纵横(2015年2期)2015-11-05
初中生之友·中旬刊(2015年4期)2015-06-10
科学中国人(2014年16期)2014-11-20