行波波长及波速对获能特性的影响
2021-04-24 07:12张继化孙晓晶黄典贵
能源研究与信息 2021年1期
张继化,孙晓晶,黄典贵
(上海理工大学 能源与动力工程学院,上海 200093)
鱼类经过亿万年的进化,逐渐拥有了很强的游动能力,不仅具有很高的游动效率,还具有极强的机动性能。因此,人类对鱼类游动进行了大量的研究,1936年Gray通过实验观测提出了著名的“Gray 疑题”。他发现同样航速的直体海豚模型所消耗的能量约是活体海豚的七倍,故推测活体海豚通过某种方式减小了阻力。
在理论研究方面,Lighthill将波动推进细分为3种方式,并提出了用于鲹科推进模式的细长体理论,认为运动获得的反作用力只与瞬时加速度有关;Wu给出了二维波动模型,加入了前缘吸力及尾缘尾迹的作用,系统地发展了二维波动板理论,为三维波动板理论的提出奠定了基础。
在实验研究方面,借助先进的数字式粒子图像测速技术(DPIV),Wolfgang等测量鲐鱼游动时的二维流场结构发现,在游动过程中,在鱼体两侧产生涡,向后运动至尾柄处脱落,这些脱落涡被尾鳍利用,可以降低能量消耗;Barrett等对机器鱼进行实验,讨论了模型中鱼体波动波长、波动振幅和Strouhal数等参数对阻力降低的影响。
在数值模拟方面,Borazjani等对鯖鱼进行了数值模拟,指出雷诺数对鲹科类游动的水动力性能具有重要影响,给出了鯖鱼的三维尾涡流场结构,研究表明影响流场结构的因素主要是Strouhal数;Dong等分析了一排无穷多个波动翼形的非定常黏性绕流问题,结果表明,反相摆动有助于增强推进力,同相摆动有利于节省游动的能耗。
鱼类使自己的身体产生行波运动,将能量施加给水,产生反卡门涡街的尾流结构,自身获得推力而前进。相反地,Huang等通过数值模拟发现,在流动的水中鱼体作不等振幅的行波运动,当无量纲波速小于一定值时,鱼体表面单元压力差方向和速度方向相同,水对鱼体做正功,即鱼体从水流中获得能量,产生卡门涡街的尾流结构。这种全新的获能模式,为未来机器鱼的超远距离航行提供了理论基础。为了进一步研究不同参数下鱼体获能的规律,本文从二维鱼体作等振幅的行波运动入手,改变行波运动的波长和无量纲波速,研究这两个参数对获能特性的影响。
1 物理模型和数值方法
1.1 物理模型
本文以NACA0012翼型作为鱼体二维的原始简化模型,在水流中作行波运动,示意图如图1所示,其中:x
、y
分别为笛卡尔坐标系的横、纵坐标;y
(x
,t
)为t
时刻模型上点的纵坐标;λ
为行波波长;A
为最大振幅;U
为来流速度。
图1 行波运动示意图Fig. 1 Schematic diagram of traveling wave motion
在行波运动过程中,给定行波波长和最大振幅,在保证中弧线长度不变的情况下,运动形式是唯一的,因此波动方程可以表示为

T
为波动周期;A
(x
) 为振幅函数。本文研究等振幅的情况,故振幅函数可以表示为

c
为振幅系数;L
为中弧线长度。行波运动的波速以来流速度U
对其无量纲化,得到无量纲波速c
,即
1.2 侧向功率和能量利用率
鱼体波动所受的力主要由摩擦力和压差力组成。摩擦力来自于模型表面的黏性剪切力,压差力来自于模型表面流体的压力差,作用在y
方向微元的分量和有量纲表达式为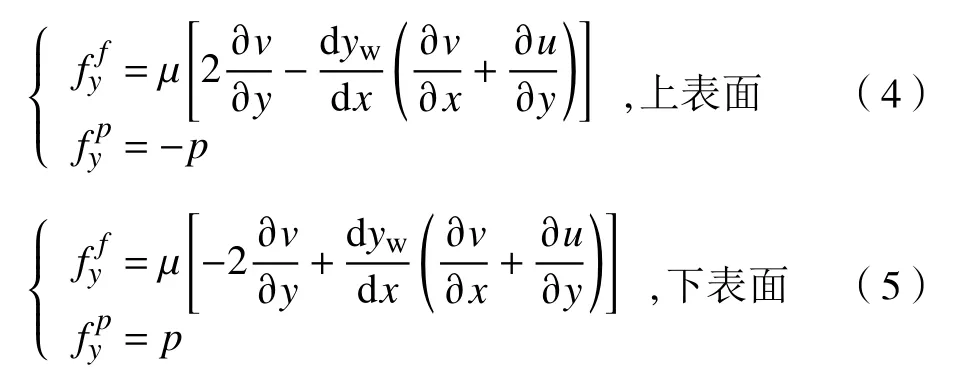
y
方向分量;为压差力的y
方向分量;u
为x
方向速度;v
为y
方向速度;μ
为流体动力黏度;p
为微元表面压力。速度在y
方向的分量表达式为
因此鱼体从水中获得的侧向功率为

P
为侧向功率(获得的能量);ds
为微元面积。将P
以ρU
L
无量纲化,得到无量纲侧向功率P
。定义最大可以获得的来流能量为

E
为来流能量;为质量流量;ρ
为水的密度;d
为最大扫掠高度。于是定义能量利用率为

式中,为能量利用率。
2 数值模拟
2.1 网格和数值计算
使用ICEM CFD划分网格,网格数为375194,翼型表面生成边界层网格,动网格域采用三角形的非结构网格,之外的计算域采用结构网格。进、出口边界条件分别设置为速度进口和压力出口,翼型表面设置为固体壁面。网格整体视图和边界层局部放大图如图2所示。数值模拟采用Fluent软件计算,介质为水,采用压力基求解,选用S-A模型,动网格采用光顺和重构这两种方法。模拟计算时,先预处理1个周期,使对称翼型逐渐变至初始时刻位置。

图2 计算网格Fig. 2 Grid details
2.2 计算方法验证
Nishio等通过实验测量了不同相位落后角下巡游推进时鱼体所受的阻力。阻力测量的实验装置如图3所示。该实验模型为三维模型,截面为NACA0018,弦长为0.15 m,细长比为1∶6。模型放置于循环水槽中,浸没部分长度为0.2 m。模型被固定在1/4弦长处,身上共有4个关节,通过计算机控制每个节点的运动,给定周期2 s,改变相位落后角。在实验过程中,电机沿水平方向拖动模型,由施加载荷测出该方向的推力,当水平方向合力为0时,阻力和推力大小相等,方向相反,此时模型达到巡游,巡游速度为0.35025 m·s,那么施加在模型上的载荷力就是所受的阻力。

图3 阻力测量的实验装置[13]Fig. 3 Experimental set-up of the hydrodynamic force measurement[13]
为了验证数值模拟方法的可靠性,本文采用Nishio的实验工况参数和运动方式,模拟计算了原始翼型为NACA0018的二维柔性体在水中巡游推进时的阻力系数,并与Nishio的实验结果进行了比较。其中,计算时间步长为0.002 s,每个周期计算1000步,总共计算6个周期,就阻力系数和运动相位落后角的关系与参考文献中的实验值进行了对比,结果如图4所示,其中:C
为阻力系数;φ
为相位落后角。从图4中可以看出,二维模拟计算得到的阻力系数与相位落后角的整体趋势与实验值的十分接近。但与文献的实验值相比,本文得到的阻力系数在相位落后角较小时偏差大,在大相位落后角时偏差小。从总体上来看,本文所采用的网格和计算程序的可靠性和可信性得到了验证。

图4 数值模拟值与实验值对比[12-13]Fig. 4 Comparison between numerical simulation results and experimental ones[12-13]
3 计算结果及分析
本文取雷诺数Re
= 120000,其中特征速度为来流速度U
= 1 m·s,特征长度为中弧线长度,L
= 0.12 m,给定最大振幅A
=c
L
= 0.1L
=0.012 m,研究不同的行波波长和波速对获能特性的影响。图5为模型在1个周期内4个时刻所在位置与形状。图6给出了在不同行波波长λ
下,无量纲侧向功率P
随无量纲波速c
的变化。由图中可以看出,随着无量纲波速c
增大,无量纲侧向功率P
先增大后减小,并存在一个最佳的无量纲波速,当c
在0.5附近时,使得无量纲侧向功率P
最大;当无量纲波速c
大于1时,侧向功率小于0,此时行波运动将处于推进区,即鱼类游动时,无量纲波速c
大于1,此时无法从流水中获得能量。行波能够从流体中获能的无量纲波速区间大致为0~1。图7给出了在不同行波波长λ
下,能量利用率η
随无量纲波速c
的变化。由图中可以看出,能量利用率η
的变化规律和无量纲侧向功率P
相同。随着无量纲波速c
的增大,能量利用率η
先增大后减小,并存在一个最佳的无量纲波速,当c
在0.5附近时,使得能量利用率η
最大。在所研究的范围内,当λ
= 0.6L
、c
= 0.5时,能量利用率达到最大值28.35%。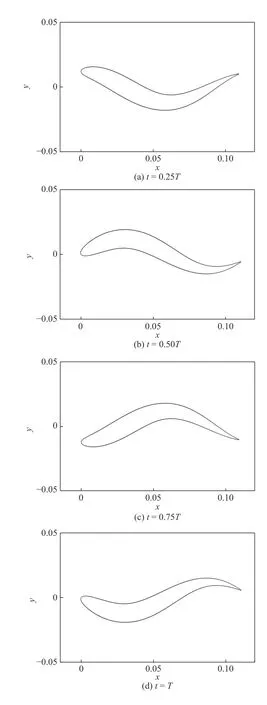
图5 1个周期内模型在4个时刻所在位置与形状Fig. 5 Schematic diagram of the model at four moments of one cycle
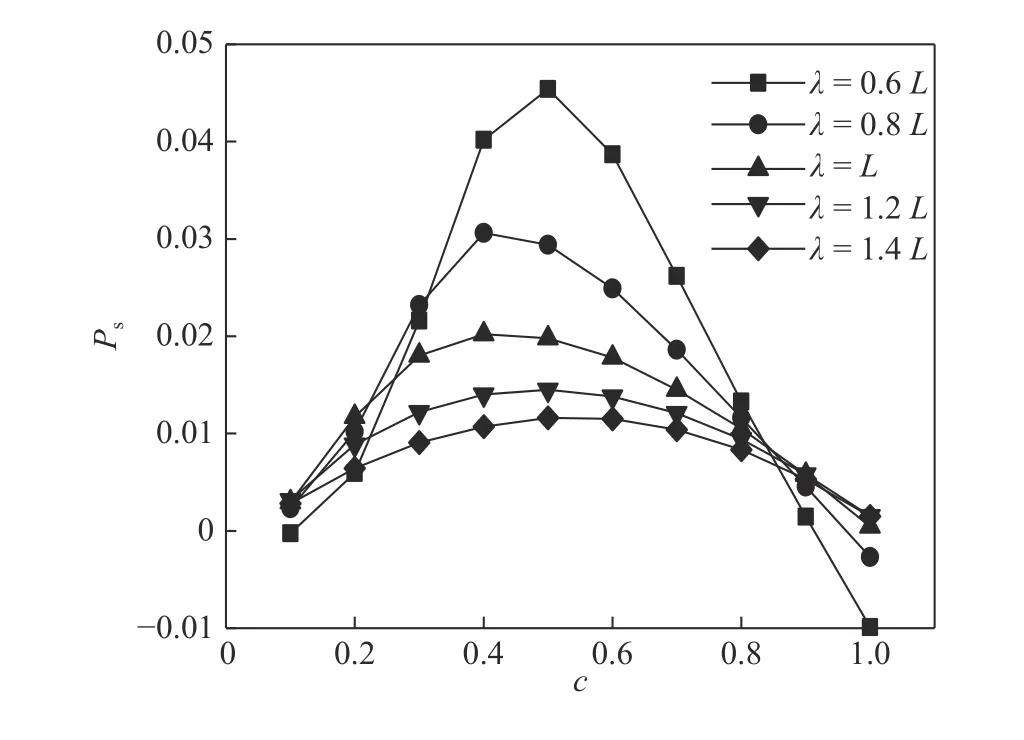
图6 无量纲侧向功率与无量纲波速和行波波长的关系Fig. 6 Relationship among dimensionless power output,dimensionless wave velocity, and wavelength
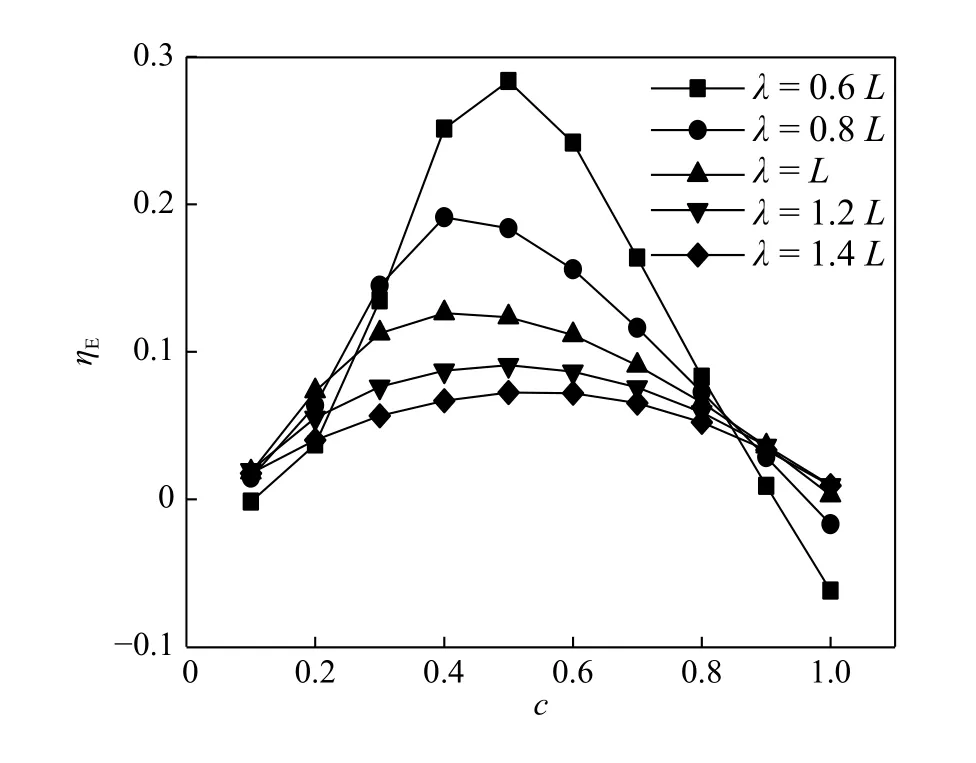
图7 能量利用率与无量纲波速和行波波长的关系Fig. 7 Relationship among energy extraction efficiency,dimensionless wave velocity, and wavelength
图8给出了行波波长λ
=L
时不同无量纲波速下的涡量云图。从图中可以看出,随着无量纲波速的增大,涡脱落的频率相应增大。当c
较小时,波动频率较小,涡脱落较慢,流道形成阻塞,故能量利用率较低;当c
较大时,波动频率较大,涡脱落较快,壁面附面层变薄,压差减小,故能量利用率也较低;当c
= 0.5时,正好在尾迹区形成卡门涡街,能量利用率达到最大值。图9给出了在不同的无量纲波速c
下,能量利用率η
随无量纲波长λ
/L
的变化。由图中可以看出,在所研究的范围内c
处于不同的区间段时,η
的变化规律也不相同。当c
较小,即处于低无量纲波速区时,随着无量纲波长λ
/L
的增大,η
先增大后减小;当c
在0~1中间区段,即处于中无量纲波速区时,η
随着无量纲波长λ
/L
的增大而逐渐减小;当c
较大,即处于高无量纲波速区时,随着无量纲波长λ
/L
的增大,η
先增大后减小。
图8 定行波波长(λ = L)下不同无量纲波速时的涡量云图 Fig. 8 Vorticity contours for different dimensionless wave velocities at λ = L
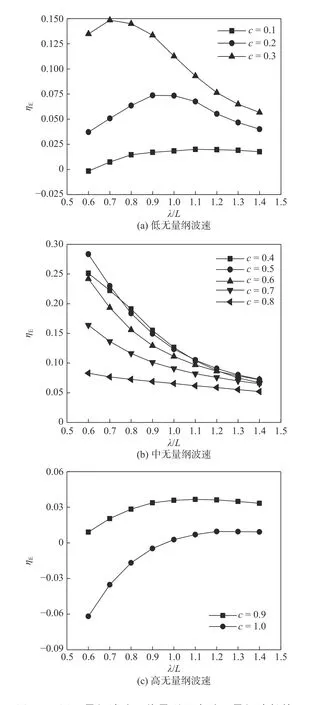
图9 不同无量纲波速下能量利用率随无量纲波长的变化Fig. 9 Variations of energy extraction efficiency with dimensionless wavelength at different dimensionless wave velocities
图10给出了无量纲波速c
= 0.5时不同行波波长λ
下的压力云图。从图中可以看出:鱼体尾迹存在较大的低压区,这意味着水中的能量被鱼体吸收,使鱼做功;当λ
= 0.6L
时,尾迹中的低压区最大,连成一片,表明鱼体从水中获取的能量最多;随着行波波长的增大,鱼体尾迹负压区面积逐渐减小,表明鱼体从水中吸收能量的能力逐渐下降。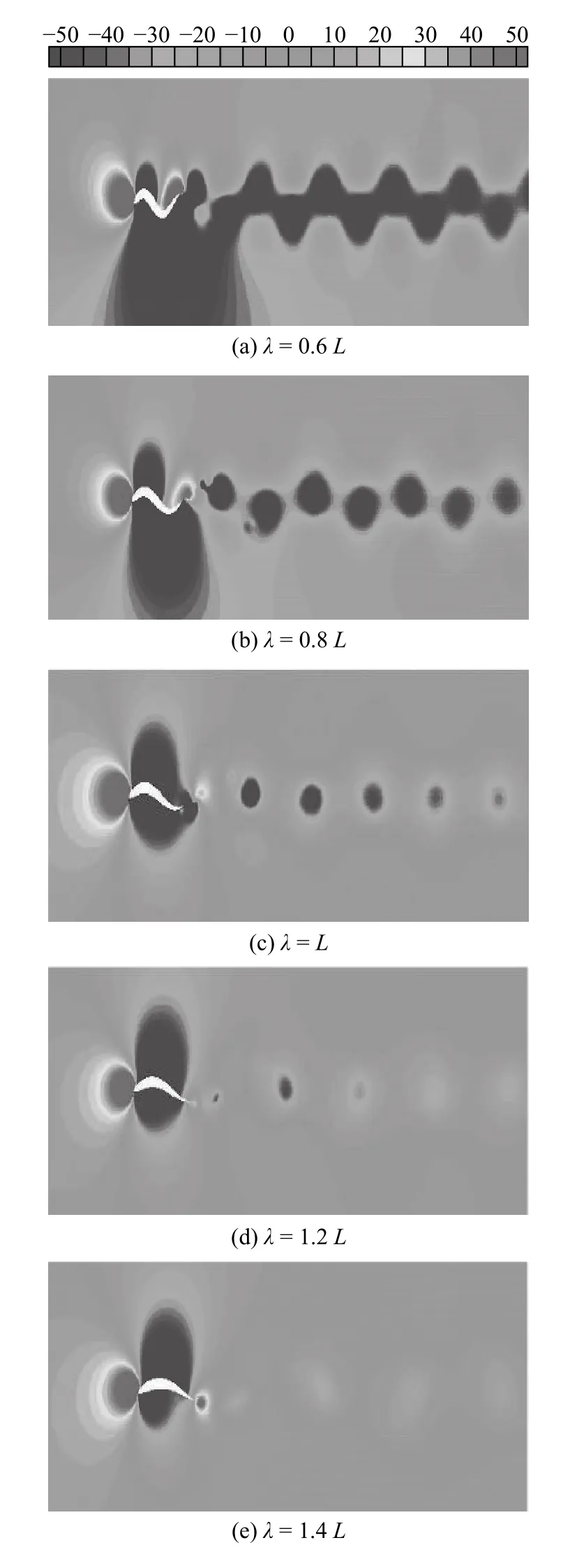
图10 定无量纲波速(c = 0.5)下不同行波波长时的压力云图Fig. 10 Pressure distribution for different wavelengths at c = 0.5
4 结论
本文以原始翼型NACA0012作为鱼体二维简化模型,使用商业软件Fluent进行数值模拟,研究了行波波长λ
和无量纲波速c
对无量纲侧向功率P
和能量利用率η
的影响。在一定参数范围内,鱼体的行波运动具有从流动的水中获取能量的能力,具体结果为:
(1) 行波波长一定时,无量纲侧向功率与能量利用率随无量纲波速先增大后减小,并存在一个最佳波速;
(2) 对于不同的行波波长,最佳无量纲波速均出现在c
= 0.5附近,其对应的最大无量纲侧向功率和能量利用率随着行波波长的增大而减小,当λ
= 0.6L
、c
= 0.5时,能量利用率达到最大值28.35%;(3) 在所研究的范围内,当无量纲波速c
处于中波速区时,η
随着无量纲波长λ
/L
的增大而逐渐减小。当无量纲波速c
处于低波速和高波速区时,随着无量纲波长λ
/L
的增大,能量利用率η
先增大后减小;(4) 获能和耗能的临界无量纲波速基本不随行波波长的变化而变化,获能区间大致在0~1之间。
猜你喜欢
现代装饰(2022年6期)2022-12-17
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
水电与抽水蓄能(2021年2期)2021-05-14
农业工程学报(2021年4期)2021-05-09
艺术品(2020年8期)2020-10-29
农业工程学报(2020年6期)2020-05-19
成都信息工程大学学报(2018年1期)2018-05-31
传记文学(2017年9期)2017-09-21
西藏研究(2017年3期)2017-09-05