
Estimating the Baseline Error of Wide-Swath Altimeters Using Nadir Altimeters via Numerical Simulation
2022-06-14 04:14MIAOXiangyingJIAYongjunLINMingsenandMIAOHongli
MIAO Xiangying, JIA Yongjun, LIN Mingsen, and MIAO Hongli, *
Estimating the Baseline Error of Wide-Swath Altimeters Using Nadir AltimetersNumerical Simulation
MIAO Xiangying1), JIA Yongjun2), LIN Mingsen2), and MIAO Hongli1), *
1),,266100,2),100081,
The baseline roll and length errors for wide-swath altimeters are major error sources in sea surface measurements that exhibit strong spatial characteristics in the cross-track direction. These errors can be identified and estimated in accordance with height differences at crossover points generated with nadir altimeters after excluding the interference from other error sources. Most of the wide-swath altimeter baseline estimation methods considered only the roll error in previous studies. A numerical simulation was conducted in this study using nadir altimeters to estimate the roll and length errors simultaneously to provide a selectable scheme for baseline error estimation and correction for future wide-swath altimeters. Results based on the parameters of the surface water and ocean topography mission and Sentinel-3A show that the correlation coefficient of the roll error between the estimated and simulated values is 0.89, while the correlation coefficient of the length error is 0.85. The sea surface height root mean square error (RMSE) can be reduced from 12.18cm to 6.45cm based on the two estimated results. The estimation effect can be increased by using multiple nadir altimeters to form an observation constellation. The numerical simulation of the five nadir altimeter constellation shows that the correlation coefficients of the roll and length errors would increase to 0.97, which reduces the sea surface height RMSE to 2.88cm. In addition, the stability of this method is indicated in simulation experiments, which introduce different degrees of sea state errors.
baseline error; wide-swath altimeter; roll angle; baseline length; nadir altimeter; crossover point height difference
1 Introduction
Satellite altimetry has become an important component of the global ocean observation system. In recent decades, radar altimeters have provided sufficient measurement data for marine research (Hamlington., 2012; Cazenave., 2018). The accuracy of altimeter measurements has increased to the order of centimeters because the TOPEX/ POSEIDON (T/P) altimeter improved precision orbit determination technology, providing the capability to mea- sure global sea elevation accurately (Salameh., 2018).As a continuation of the T/P mission, the Jason series alti-meters have consistently performed exceptionally well over the past two decades. The resolution and accuracy of global sea elevation measurements are further improved by synthetic aperture radar (SAR) altimeters (such as Sentinel-3), which introduce aperture synthesis technology in the along- track direction (Quartly., 2017; Yang., 2019). Conventional and SAR altimeters provide observations of nadir points along the satellite ground track, and these al- timeters can be collectively referred to as nadir altimeters. Nadir altimeters play an important role in global large-scale and long-term sea surface height observations, providing important data for global oceanic changes and large- scale ocean circulation processes. However, nadir altimeters have small-diameter footprints, and the spacing between adjacent orbits is remarkably large. Even if a series of nadir altimeters is used to form a constellation, fusion data have difficulty describing the mesoscale and submeso-scale processes comprehensively, playing a critical role in marine activities (Fu and Ubelmann, 2014).
A wide-swath altimeter based on interferometric SAR measurements substantially improves the measurement range and spatial resolution, making mesoscale and submesoscale ocean observations possible. The surface water and ocean topography (SWOT) mission is a wide-swath al- timeter project that is being jointly developed through in- ternational cooperation. Sea surface and terrestrial water heights will be observed over a 120km wide-swath when the project is launched in 2022 (Durand., 2010; Desai, 2018).Gaultier. (2016) developed an SWOT simulator software to research the measurement performance and error impacts of this project because the launching of the SWOT mission is still pending. Research on fine-scale oceandynamic processes has been unprecedented due to the com- bination of this software and the current high-resolution ocean circulation models or data assimilation(Wang and Fu, 2019; Wang., 2019). Furthermore, the SWOT si- mulator can be used to assess the error budget of the mission through error power spectrum estimation (Ubelmann., 2018).
Wide-swath interferometry is remarkably sensitive tochanges in flight attitude. Therefore, baseline roll error (re- ferred to as roll error) and baseline length error (referred to as length error) are important error sources for a wide- swath altimeter. The baseline error in this study represents the difference between the baseline parameters used in sea surface inversion and their true values, that is, the residual error after spaceborne calibration. Ensuring the absolute stability of the flight platform is almost impossible under current conditions. The flight attitude can be measured to a certain extent through a high-performance gyroscope and other equipment. However, considering the measurement accuracy and long-term drift, meeting the high-precision requirements of a long-term mission through this calibration alone remains difficult (Peral and Esteban-Fernandez, 2018). Fortunately, the height error caused by baseline error can be eliminated once the true baseline parameters are known. Therefore, calibration and verification based on the ground data processing phase will be indispensable.
A wide-swath altimeter calculates the sea surface heightbased on the interference phase, which is similar to an interferometric synthetic aperture radar (InSAR) system. Base- line parameter estimation, a crucial step in InSAR data pro- cessing, is usually conducted by classical methods, such as ground control points, interferograms, and precise orbit determination data (Du., 2010). However, wide-swath altimeters have the characteristics of small incident angles and short physical baselines and mainly use the dynamic ocean as the observed object. Therefore, these traditional baseline parameter estimation methods require adaptive im- provements.
The first solution is to use only the values measured by the wide-swath altimeter itself. Zhang. (2014) proposed an attitude measurement method based on the nadir interference phase of a wide-swath altimeter system. This phase can be derived from the geometric interference re- lationship, in which the measurement accuracy of the nadir interferometric phase mainly depends on the change in the roll angle when the height variation of the platform or the target point is excluded. This method achieved a 1.5 arcsec accuracy in an airborne test. In addition to the nadir interference phase, Zhai. (2019) proposed an estimation method of the baseline roll angle for double-side looking wide-swath altimeters by using the curve intersection of the sea surface height derivative in the opposite swaths. The estimation error of this method was appro- ximately 0.3arcsec in the simulation experiment.
Another commonly used baseline error estimation sche- me is called the cross-calibration method, which is based on the target height difference between a wide-swath altimeter and other measurement methods.measure- ments (Wang., 2018) and satellite altimeter data can provide this kind of external data. Densely distributingmeasurement instruments in all oceans is difficult despite their high measurement accuracy. In addition, exten-sive altimeter data (including nadir and other wide-swath altimeters, and even the same wide-swath altimeter mea- surements along different tracks) can be used to estimate the baseline of a wide-swath altimeter. Fu and Rodriguez (2004) suggested that the systemic error (including roll error)could be corrected using the height difference between the ascending and descending tracks of the same target area without considering the variation of the ocean. Dibarboure. (2012) researched empirical cross-calibration using external references and altimetry constellations. They simu- lated the linear and parabolic errors, respectively, caused by the roll and length errors in different experiments. A two- step scheme joined by local estimates with different cross structures and global interpolation was performed, and this method reduced the topographic RMSE from 70cm to 2cmunder extreme conditions. Dibarboure and Ubelmann (2014)conducted an in-depth exploration of the above methods. They evaluated the performance of the direct, collinear, crossover, and subcycle methods in correcting the SWOT roll error. They also highlighted that low-resolutionuniform grid reference data have the best coverage and correction effect when using the direct method, but leakagesfrom oceanic variability on roll easily occur. The three other methods can complement the direct method to reduce this problem.
The two above-mentioned types of error estimation me- thods both effectively calibrate the roll error in simulation and airborne experiments. However, these methods consider the roll error as an error source alone. The research of some wide-swath altimeter data assimilation experiments(Metref., 2019) revealed that length, phase, and other structural errors are also important components that should be jointly considered in future data calibration and applications. The phase error has a linear distribution characteristic similar to the roll error and can be improved to a certain extent in the processing of radar antenna electronic systems. However, the length error, which is closely related to the physical baseline, has a completely different parabolic feature; thus, it is also a source of error that should be considered. Along-track nadir altimeter data have the following advantages: remain unaffected by baseline error, high resolution along the track, create constellations from multiple nadir altimeters, and maintain stability from leakages from oceanic variability. Thus, nadir altimeters are used as an auxiliary data source to investigate the estimation and correction methods of the roll and length errors simul- taneously in the same scenario. This study intends to provide a methodology that could be used the estimate the baseline error of future wide-swath altimeters.
The remainder of this paper is organized as follows. Sections 2.1 and 2.2 describe the measurement principle and the crossover calibration method, respectively. Sections 2.3and 2.4 respectively explain the simulated wide-swath data to be corrected and the ancillary nadir track position data. Section 3 presents all results, including correction with Sentinel-3A, other single nadir altimeters, and multi-nadir altimeter constellations. Section 4 discusses the influence of different sea states on the estimation effect. Section 5 provides the conclusions.
2 Method and Data
2.1 Measurement Principle and Baseline Error
A wide-swath altimeter can measure the sea surface height over a large scale and benefit from SAR interferometry with dual antennas. Taking SWOT mission as an example, the orbital height is approximately 890km, and the inclination is 77.6˚. The repeat period of its orbit is 21 days, andeach cycle comprises 292 revolutions. The distance betweenadjoining tracks is approximately 130km at the equator. Overlap between the subtracks is observed as the latitude increases, and the overlapping area becomes increasingly large. The main payload of SWOT is KaRIn, a Ka-band ra- dar interferometer. The distance between the two antennas is 10m (described as the baseline length), and the nominal roll angle is 0˚. The ground observation swath is 60km on the left and right (the gap is 10km in the middle of both sides) in this design case. This measurement method enables SWOT to observe most of the world’s oceans and major terrestrial waters and minimize the effects of tides on the measurement results (Esteban-Fernandez., 2010; Rodriguez and Esteban-Fernandez, 2010).
The principle of a wide-swath altimeter is shown in Fig.1.

Fig.1Geometric principle of wide-swath altimeter height measurements.
In Fig.1, A1is the primary antenna that transmits micro- wave signals to the target and receives the returned signals, while A2is a secondary antenna that receives only the signal returned from the target. The phase difference of the echo signal according to the geometric relationship is

whereis the wavenumber,1and2are the ranges of the two antennas to the target point,is the incident angle, andis the physical baseline length. Afteris calculated by the phase difference, the height of the target point relative to the reference ellipsoid,, can be calculated by com- bining the range1and the satellite orbit heightobtained by the precision orbit determination system:

The main error sources for a wide-swath altimeter include the baseline error, phase error, orbit error, tropospheric delay, and ionospheric delay. The baseline error can be divided into roll and length errors. A strong correlation is observed between the baseline error and the cross- track distance. Baseline errors can induce a large height error at the far end of the observation swath, which is one of the main error sources in the measurement process. The measurement principle indicates that the relationship between the baseline error and the cross-track distance can be expressed as
whererepresents the cross-track distance;., the distance of the target point in the cross-track direction from the nadir point. δrepresents the error of the roll angle, and δrepresents the error of the baseline length. The height error caused by δlinearly increases across the swath, and the height error caused by δquadratically in- creases across the observation swath. These conditions indicate the production of a large height error at the far end of the swath.
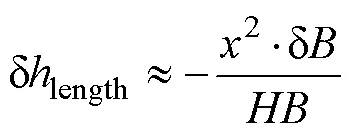
For KaRIn, Eqs. (3) and (4) indicate that if a roll error of 1arcsec exists, then the height error would be more than 30cm at the far end of the 60km observation swath, and the height error in that location caused by a 1mm length error would be more than 40 cm, as shown in Fig.2.
Fig.2a shows the height error caused by the 1mm length error and the 1arcsec roll error, and the linear and quadratic correspondence can be observed. Fig.2b shows the total height error caused by the roll and length errors with different positive and negative signs. The height error cannot be directly corrected by a simple adjustment method due to this special spatial distribution relationship. Fortuna- tely, if the real height or accurate measurements of some points in the same measurement line are known, then the baseline error can be estimated by data matching and fitting.
2.2 Baseline Error Estimation Method
Some crossover points are generated due to their orbit shapes when wide-swath and nadir altimeters observe the same area, as shown in Fig.3.
The blue line in the Fig.3 represents the footprint trajectory of the nadir altimeter, the black rectangle represents the observation area of the wide-swath altimeter, and the green and red dashed lines represent the measurement lines in the cross-track direction of the wide-swath altimeter. The black dots in the figure represent crossover points of the wide-swath and nadir altimeters, which indicate the real intersection points. The wide-swath and nadir altimeters may indirectly measure the crossover point. Thus, spatial interpolation is necessary in most cases.
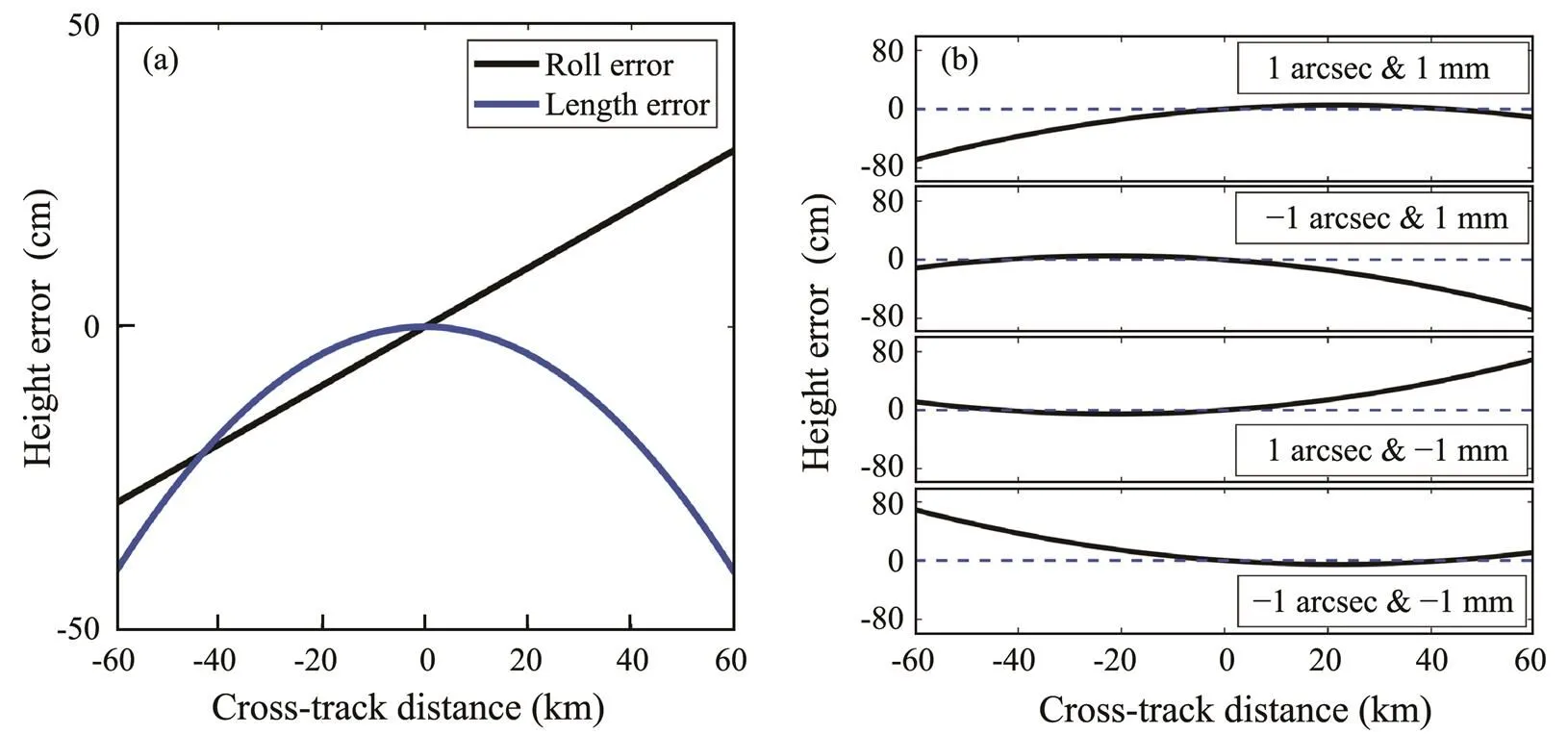
Fig.2(a) Height errors caused by a 1mm length error and a 1arcsec roll error (unit: cm); (b) spatial distributions of roll and length errors with different positive or negative signs (unit: cm).
Spatial matching and interpolation of the sea surface height measured by the wide-swath and nadir altimeters are performed after the other error sources have been ideally corrected. The sea surface height difference at the crossover point is then calculated. Nadir altimeters are unaffect- ed by baseline error. Thus, the difference at the crossover point can be expressed as


whereswath,nadir,andrealrepresent the wide-swath altimeter measurements, the nadir altimeter measurements, and the real sea surface height in the target region, respectively.swathandnadirare the residual errors from other errorsources of the wide-swath and nadir altimeters, respectively. δrealrepresents the sea surface height change during their observation time.
Over the entire observation region, if more than two crossover points lie on the same measurement line (such as the green measurement line in Fig.3), then the roll and length errors can be estimated directly based on the height difference. However, if only 1 or 0 crossover point is observed in the same measurement line (as with the red measurement line in Fig.3), then obtaining the direct estimation result is impossible. The baseline error under this situation can be corrected by interpolation.

whereestis the estimation of the roll and length errors.is the orthogonal polynomial of the baseline error and the cross-track distance characteristic obtained according to Eqs. (3) and (4). Δis the sea surface height difference at the crossover points.
2.3 Wide-Swath Radar Altimeter Simulation System
A wide-swath radar altimeter (WSRA) simulation system is developed on the basis of the measurement principle of the wide-swath altimeter. This system mainly includes the ground point trajectory calculation, the observation swath position calculation, the error source setting, the interference phase simulated measurement, the sea surface height calculation, and the error analysis. This system is based on a wide-swath altimeter measurement geometry, which means that its source of error (roll, length, and ranging errors) is set during the measurement process rather than that directly superimposed on the sea surface height data. This phenomenon can help examine the error composition, error impact, and error estimation methods with substantial flexibility.
A random sea surface height image is used in this study as the ‘target sea surface height’ in the research process to simulate the wide-swath and nadir altimeters. Only the impact of various measurement errors, that is, the difference between the simulated measurement results and the target sea surface height, is considered. Therefore, the accuracy of this sea surface height image does not require verification and discussion. The target sea surface height image and the error-free sea surface height within the observation swath region are shown in Fig.4; the latter can be used as a benchmark to evaluate the estimation method below quantitatively.
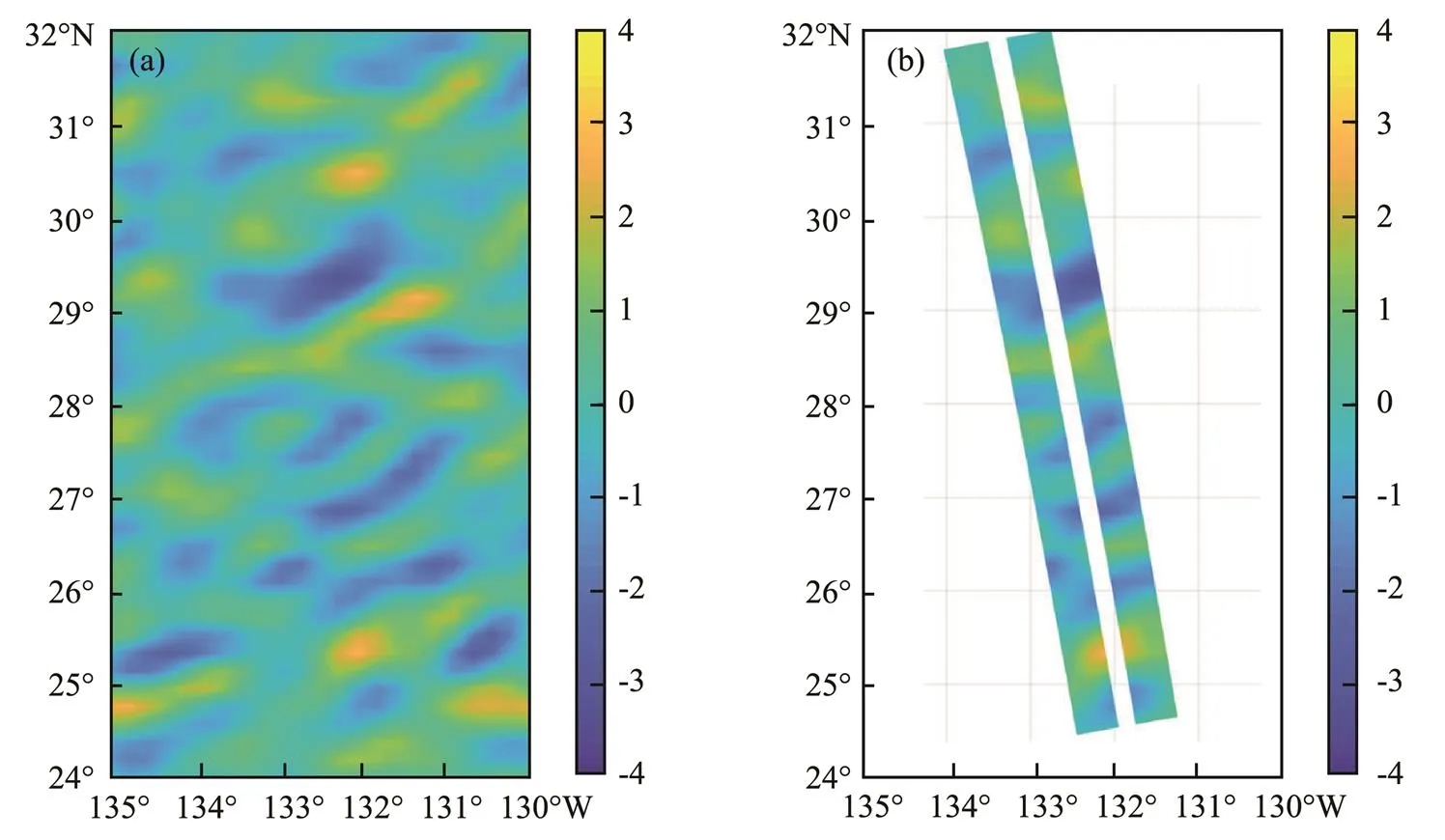
Fig.4 (a), simulated sea surface height in the target region (unit: m); (b), error-free height along the swath (unit: m).
The roll angle and the baseline length were set to the nominal value superimposed with random errors that conform to their distribution characteristics during the interference phase calculation, while only the nominal values were used in the sea surface height inversion stage. Therefore, the roll and length errors are introduced in this way. These errors are set considering the error generation and the magnitude of the actual measurement procedure to superimpose the high and low frequencies to simulate the possible flight attitude drift, baseline jitter, gyroscope error,and other possible sources of roll angle and baseline length during the measurement. The along-track distribution of the roll and length errors is shown in Fig.5. The standard deviations of the roll and length errors are 0.43arcsec and 0.50mm, respectively. In addition, a Gaussian random error with 0.5cm standard deviation within the entire swath is added, which represents the residual error (refer to the discussion) of the other error sources after correction, that is,swathin Eq. (5).
After the sea surface height calculation and error analysis, the measurement results and error distribution of the wide-swath altimeter obtained by the WSRA system under the above conditions are shown in Fig.6.
A substantially large height error along the outer edge of the observed swath is found due to the influence of the baseline error. The data results show that the RMSE of the sea surface height in Fig.6 is 12.18cm.
2.4 Parameters of Nadir Altimeters
The nadir altimeters selected in this study include Sentinel-3A, Sentinel-3B, Jason-3, Saral, and CryoSat-2. Sys- tematic deviations will be observed between different nadir altimetry systems due to the different orbit configurations, sampling characteristics, and other measurement differences. The multi-mission cross-calibration method can be used to eliminate these deviations and derive consistent merged data (Bosch., 2014). Systematic deviation also exists between wide-swath and nadir altimeters for similar reasons. This bias can be approximated as a constant term over the entire observation swath considering the stability of the systematic deviation, which does not affect theestimation of the baseline error and can be eliminated during the cross-calibration process with the nadir altimeters (Ren., 2020).
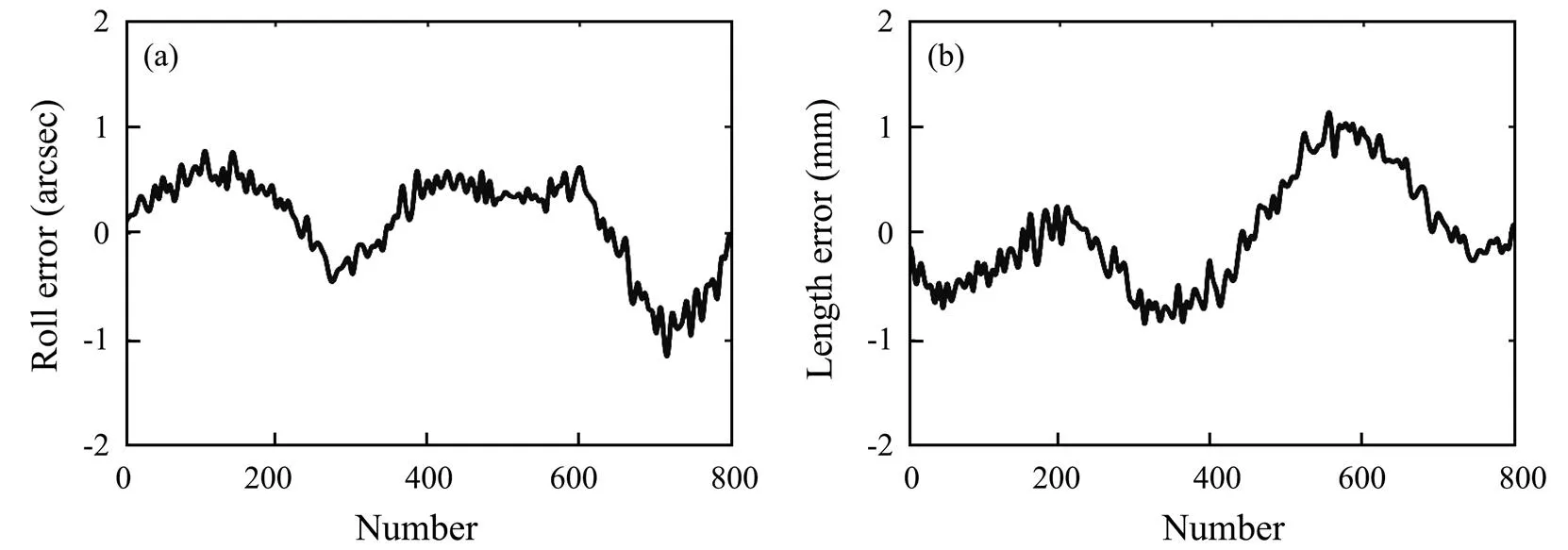
Fig.5 (a), simulated along-track roll error; (b), simulated along-track length error.

Fig.6 (a), error-containing sea surface height computation (unit: m); (b), height error (unit: cm).
Only the measurement point position coordinates of these nadir altimeters will be used in this study to ensure consistency with the wide-swath altimeter simulation data. The sea surface height of nadir altimeters will be generated by the WSRA system simulation, and their measurement accuracy is set to 3cm. The relevant parameters of these al- timeters are shown in Table 1.
The ground track of nadir altimeters in the target region is shown in Fig.7.
The intersection shapes of Sentinel-3A and SWOT are the best in this region. Sentinel-3B, CryoSat-2, and Saral have a certain degree of intersection points in the observed swath, while Jason-3 only has a few crossover points with SWOT.

Table 1 Parameters of nadir altimeters

Fig. 7 Ground trajectory of nadir altimeters in the target region (from top left to right: Sentinel-3A, Sentinel-3B, CryoSat-2; from bottom left to right: Saral, Jason-3).
3 Results
This section will first take Sentinel-3A as an example according to the ground track relationship of the nadir and wide-swath altimeters shown in Fig.7 to conduct a comprehensive baseline error estimation step and result description. This method will be tested on other nadir altimeters and finally used in a multi-nadir altimeter constellation for baseline error estimation.
3.1 Estimation Results Based on Sentinel-3A
The ground track of Sentinel-3A in the target region is shown in Fig.7(a), and its sea surface height simulation is performed by the WSRA system, whose measurement accuracy is set to 3cm. The result is shown in Fig.8.
The simulation results of Sentinel-3A are matched with the sea surface height simulated by the wide-swath alti- meter shown in Fig.6(a). The precise latitude and longitude of crossover points are obtained by bilinear interpolation. The sea surface heights of Sentinel-3A and SWOT at crossover points using spatial interpolation and the height difference are calculated.
Least-squares fitting of the roll and length errors is per- formed by the sea surface height difference and the cross- track distance according to Eqs. (5) and (6), and their error estimation results are shown in Fig.9.
Fig.9 shows that the roll and length errors are well estimated on the measurement line with two or more crossover points, but these measurement lines do not cover the entire observation region. Data processing in the along- track direction is also required to achieve an overall correction of the baseline error. This step includes quartile out- lier removal, along-track spatial interpolation, and smooth noise reduction with a 50 spatial window. The roll and length error estimates after along-track processing are shown in Fig.10.
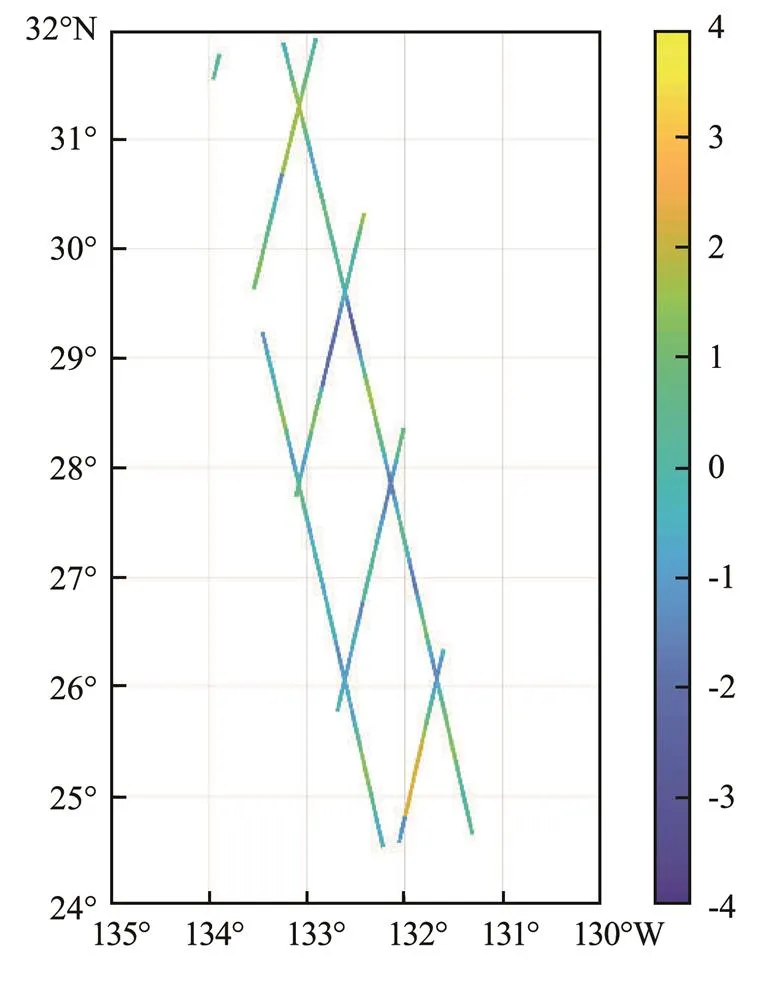
Fig.8 Estimated sea surface height along a Sentinel-3A swath (unit: m).

Fig.9 (a), simulated and estimated values of roll error; (b), simulated and estimated values of length error.

Fig.10 (a), simulated and estimated values of roll error; (b), simulated and estimated values of length error.
The data results show that the correlation coefficient be- tween the estimated and simulated values of the roll error is 0.89 after along-track data processing, and the root mean square difference is 0.21arcsec. Meanwhile, the correlation coefficient of the length error is 0.85, and the root mean square difference is 0.29mm.
The sea surface height error in the entire observation swath region is calculated and corrected by using the roll and length errors according to Eqs. (3) and (4), and the corrected sea surface height and residual error images are obtained as shown in Fig.11. Statistical results show that the RMSE of the sea surface height in this image is reduced from 12.18cm to 6.45cm after error correction. Figs.10 and 11 respectively showthat the trend of the estimation results of the roll and length errors is consistent with the simulated error source. Therefore, the sea surface height can be corrected. However, two problems must still be solved. First, measurement lines that can directly perform error estimation are limited, which results in a reduction in the correction effect after along-track data processing. Second, capturing this method for high-frequency parts of the baseline error is difficult.
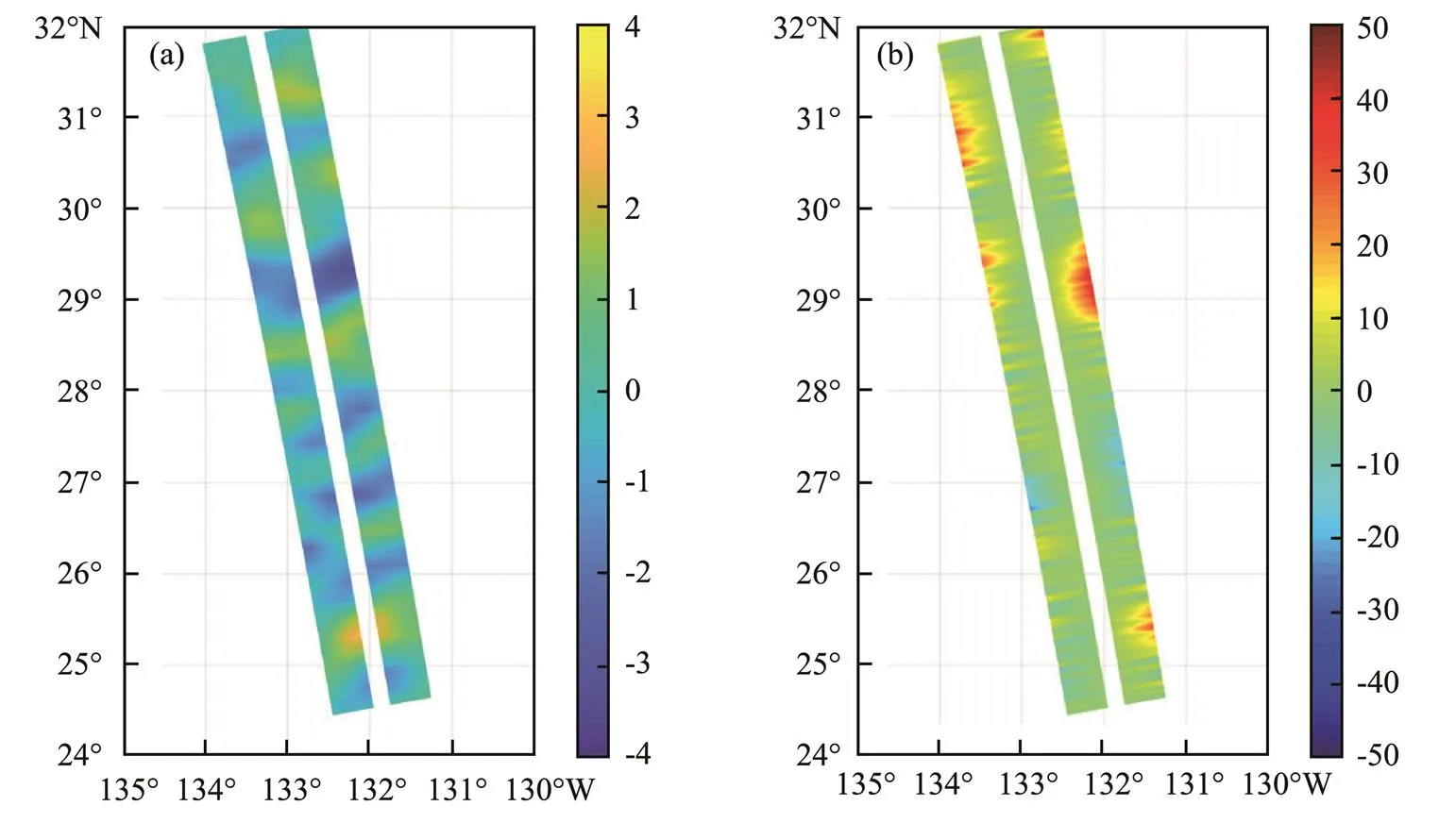
Fig.11 (a), corrected sea surface height (unit: m); (b), residual error (unit: cm).
3.2 Estimation Results Based on Other Nadir Altimeters
The steps in Section 3.1 were executed on Sentinel-3B, CryoSat-2, Saral, and Jason-3. The results are shown in Table 2 and Fig.12.
Fig.12 and Table 2 indicate that the baseline error estimates based on Sentinel-3B and CryoSat-2 can have some effect, but the results are slightly worse than those of Sentinel-3A. The baseline error estimate results based on Saral and Jason-3 are poor, possibly due to the limited crossover points of these nadir and wide-swath altimeters. Com- pared with the observation swath of tens or even hundreds of kilometers, the orbital spacing of the nadir altimeter is excessively sparse. The RMSE of sea surface height after correction depends on the estimation results of roll and length errors, which is associated with the proportion of measurement lines with two or more crossover points in the entire region, namely the coverage in Table 2. The distribution of crossover points depends on satellite orbital parameters, whichmeans that the coverage between nadir and wide-swath altimeters is fixed for a particular nadir altimeter. Therefore, using multiple nadir altimeter constellations to improve the estimation effect is considered.
3.3 Estimation Results Based on Multi-Nadir Altimeter Constellations
One nadir altimeter could be used in this study to estimate the baseline error of a wide-swath altimeter, but the performance was neither high nor stable. Therefore, a mul- ti-nadir altimeter constellation was used to solve this pro- blem. Three constellation combination schemes, namely Sentinel-3A+Sentinel-3B (referred to as S3AB), CryoSat- 2+Saral+Jason-3 (referred to as CSJ), and all five nadir altimeters (referred to as FiveNadirs), are considered in this section according to the orbital characteristics of nadir altimeters.

Table 2 Statistical results of baseline error estimation based on each nadir altimeter after along-track treatment
Notes: r_roll denotes the correlation coefficient between the estimated and simulated values of the roll error. r_length denotes that of the length error. RMSE_roll denotes the RMSE of roll error. RMSE_length denotes the RMSE of length error. RMSE_h denotes the RMSE of sea surface height after correction depending on the estimation result. Coverage denotes the proportion of measurement lines with two or more crossover points in the entire region.

Fig.12 Simulated and estimated values of roll error (left) and length error (right).
First, the simulated sea surface height data of each nadir altimeter obtained above are grouped into different constellation datasets. The method described in Section 3.1 is used to estimate the baseline error for each constellation. The results are shown in Fig.13 and Table 3.
Fig.13 and Table 3 reveal that the use of multiple nadir altimeters for baseline error estimation can help improve the estimation results. The first two combinations cover theentire observation swath region and accurately describe the trend of the baseline change. However, some miscalculations may be observed in a few situations. The simultaneous use of five nadir altimeters can almost completely describe the baseline error.
The sea surface height error was calculated and corrected over the entire observation swath region according to Eqs. (3) and (4) using the estimated roll and length errors based on five nadir altimeters. The corrected sea surface height and residual error imaging are shown in Fig.14.
Fig.14(b) shows that the sea surface height error is significantly reduced by using five nadir altimeters. The statistical results show that the total RMSE of height can be reduced to 2.88cm. However, this method still cannot ob- tain the high-frequency variation in the baseline error due to the smooth noise reduction operation. Compared with some previous studies, the largest advantage of this approach lies in its execution in the presence of roll and length errors and its excellent performance without assuming that only one of the errors exists.

Fig.13 Simulated and estimated values of roll error (left) and length error (right).

Table 3 Statistical results of the baseline error estimation based on each constellation after along-track treatment
>
Note: Same as Table 2.

Fig.14 (a), corrected sea surface height using a five nadir altimeter constellation (unit: m); (b), residual error (unit: cm).
4 Discussion
The above experiments assumed that the errors other than the baseline error had been ideally corrected, leaving several residual errors with Gaussian distributions. However, from a realistic perspective, another source of error should be considered, that is, the error related to the sea state. Some studies have shown that dynamic changes in sea surface waves can cause electromagnetic bias as well as phenomena, such as volumetric decorrelation, wave spectrum aliasing, velocity bunching, and surfboard sampling, which affect the performance of wide-swath altimeters (Peral., 2015; Bai., 2020). The main factors influencing these effects include the significant wave height (SWH), incident angle, and relative wave direction, amongwhich the SWH occupies a dominant position. The WAVE- WATCH-III simulation research by Peral. (2015) in- dicated that the swath-average height error caused by multiple wave effects is 2.4 and 2.9cm when the SWH is 2 and 4m, respectively, which significantly increases to 6.4cm when the SWH increases to 8m. The height error provided herein is the original error caused by waves, not the remaining part after ideal correction.
The extent of disturbance of the previously performed baseline error estimation method as the sea state increases will be discussed in this section. The same sea surface to be measured and the baseline error introduced will remain constant to maintain the continuity and comparability of the above experiments. The wave-related error is merged with the random Gaussian error within the swath, that is,swathin Eq. (5), which represents the total residual error after ideal correction, except for the baseline error. The standard deviation of this part of the Gaussian error ranges from 0.5cm to 5cm, which can cover the different wave errors based on SWHs ranging from 2m to 8m under normal to extreme conditions.
The baseline error estimation and correction were conducted using the same five nadir altimeter constellation, and the results are shown in Fig.15. The black line represents the total sea surface height RMSE before baseline error correction, and the red line is after correction.

Fig.15 Sea surface height RMSE before and after baseline error correction under different sea conditions.
The total sea surface height RMSE rises slowly from 12.18cm to 12.82cm when the Gaussian error standard de- viation increases ten times. This result indicates that the total height error does not change significantly with the sea state due to the dominance of the baseline error. By contrast, the residual height error RMSE after correction changes from 2.88cm to 4.92cm. However, the data results indicate that all the correlation coefficients between the estimated roll error and the simulated value are 0.97 under varying degrees of random Gaussian error, which is also the case for the length error. The RMSE of the roll error is maintained at 0.11arcsec, and that of the length error is approximately 0.12mm. This result demonstrates that the baseline error has been accurately estimated under various sea states. The increase in the total height RMSE after baseline correction is mainly caused by wave-related errors, and the correction effect of the baseline error has minimal influence; that is, this baseline error estimation method has good stability.
5 Conclusions
Roll and length errors are important error sources in wide- swath altimeter measurements, resulting in large height errors, especially outside the observation swath. Both error sources have a strong correlation with the cross-track dis- tance, but their spatial correspondences are different. A WSRA simulation system is developed in the current study to demonstrate the influence of the baseline error on the measurement of the wide-swath altimeter. The height error caused by the baseline error is unevenly distributed in the swath; therefore, the simple adjustment method, which averages the measurement result of the ascending and de- scending paths to reduce the height error, cannot be used.
The residual height error for a wide-swath altimeter should be primarily dependent on the roll and length errors after the ideal correction of other weakly cross-track- dependent error sources. The methodology that estimates the baseline error of a wide-swath altimeter by using nadir altimeters is studied on the basis of the relationship between the baseline error and the cross-track distance. The coordinates of the wide-swath and nadir altimeters in the target region are matched, and their respective mea- sured values at the precise crossover points are obtained by interpolation to calculate the sea surface height difference. The estimated values of the roll and length errors are obtained simultaneously using the least-squares fitting me- thod according to the cross-track distance. Finally, the base- line error estimation results of the entire area are obtained through along-track data processing, and these values are used for height error correction of the wide-swath altimeter.
The data results reveal that the correlation coefficient between the estimated and simulated values is 0.89 and 0.85 for the roll and length errors when only Sentinel-3A is used as a simulated reference data source for the SWOT simulated data, and the RMSE of height can be reduced from 12.18cm to 6.45cm in this experiment. Furthermore, the test results of other single nadir altimeters indicate that the estimation effect of the wide-swath altimeter baseline error has a connection with the coverage ratio, in which the measurement lines exceed two or more crossover points in the entire area.
Analysis shows that increasing the number of crossover points of the nadir and wide-swath altimeters can improve the baseline error estimation effect. However, the position of the intersection of a single nadir altimeter and a wide- swath altimeter is fixed by their orbital parameters. This phenomenon suggests that multiple nadir altimeters can be used to form a constellation to estimate the baseline error of a wide-swath altimeter. The results also show that the RMSE of the sea surface height can be further reduced to 2.88cm by the same method when Sentinel-3A, Sentinel-3B, CryoSat-2, Saral, and Jason-3 are combined. In addition, different sea states will affect the measurement accuracy of a wide-swath altimeter by introducing additional errors. A supplementary experiment was conducted to assess the performance of this baseline error correction method with different degrees of other errors. The simulation results are promising because the baseline error estimation method is unaffected by sea states; that is, it has good stability.
Compared with some previous studies, this method can be performed in the presence of roll and length errors, with- out presuming that only one of these errors exists. Capturing the high-frequency error is still difficult due to the spatial resolution limit of nadir altimeters. However, this method achieved satisfactory results in simulation experiments. This method can also provide an optional methodology for baseline error estimation and correction for future SWOT or other wide-swath altimeters.
Acknowledgements
This work was supported by the Shandong Provincial Natural Science Foundation (No. ZR2020MD097), the Na- tional Key Research and Development Program of China (No. 2016YFC1401004), and the National Natural Science Foundation of China (No. 62031005).
Bai, Y., Wang, Y., Zhang, Y., Zhao, C., and Chen, G., 2020. Im- pact of ocean waves on Guanlan’s IRA measurement error., 12 (10): 1534.
Bosch, W., Dettmering, D., and Schwatke, C., 2014. Multi-mis- sion cross-calibration of satellite altimeters: Constructing a long-term data record for global and regional sea level change studies., 6 (3): 2255-2281.
Cazenave, A., Palanisamy, H., and Ablain, M., 2018. Contem- porary sea level changes from satellite altimetry: What have we learned? What are the new challenges?, 62 (7): 1639-1653.
Desai, S., 2018. Surface Water and Ocean Topography Mission (SWOT): Science requirements document, NASA (accessed 24 January 2018, Rev B), 1-28. Available online: https://swot. jpl.nasa.gov/files/swot/ (accessed on 31 December, 2021).
Dibarboure, G., and Ubelmann, C., 2014. Investigating the per- formance of four empirical cross-calibration methods for the proposed SWOT mission., 6: 4831-4869.
Dibarboure, G., Labroue, S., Ablain, M., Fjortoft, R., Mallet, A., Lambin, J.,., 2012. Empirical cross-calibration of coherent SWOT errors using external references and the altimetry con- stellation., 50 (6): 2325-2344.
Du, Y., Yang, S., and Shi, H., 2010. Study on accurate estimation of baseline parameters of space-borne InSAR based on GCPs.Beijing, 1- 4.
Durand, M., Fu, L. L., Lettenmaier, D. P., Alsdorf, D. E., Rodriguez, E., and Esteban-Fernandez, D., 2010. The surface water and ocean topography mission: Observing terrestrial surface water and oceanic submesoscale eddies.,98 (5): 766-779.
Esteban-Fernandez, D., Rodriguez, E., Fu, L. L., Alsdorf, D., and Vaze, P., 2010. The surface water and ocean topography mission: Centimetric spaceborne radar interferometry.–Toubouse, 455-461.
Fu, L. L., and Rodriguez, E., 2004. High-resolution measurementof ocean surface topography by radar interferometry for ocea- nographic and geophysical applications. In:. Sparks, R. S. J., and Hawkeswort, C. J., eds., American Geophysical Union, Washington D. C., 209-224.
Fu, L. L., and Ubelmann, C., 2014. On the transition from profile altimeter to swath altimeter for observing global ocean sur- face topography., 31 (2): 560-568.
Gaultier, L., Ubelmann, C., and Fu, L. L., 2016. The challenge of using future SWOT data for oceanic field reconstruction., 33 (1): 119-126.
Hamlington, B. D., Leben, R. R., and Kim, K. Y., 2012. Impro- ving sea level reconstructions using non-sea level measure- ments., 117 (C10): 1-14.
Metref, S., Cosme, E., Le Sommer, J., Poel, N., Brankart, J. M., Verron, J.,., 2019. Reduction of spatially structured errors in wide-swath altimetric satellite data using data assimilation., 11: 1336.
Peral, E., and Esteban-Fernandez, D., 2018. SWOT mission per- formance and error budget.–Valencia, 8625-8628.
Peral, E., Rodríguez, E., and Esteban-Fernández, D., 2015. Impact of surface waves on SWOT’s projected ocean accuracy., 7 (11): 14509-14529.
Quartly, G., Nencioli, F., Labroue, S., Femenias, P., and Cretaux, J. F., 2017. Ensuring that the Sentinel-3A altimeter provides climate-quality data.. War- saw, 104220R.
Ren, L., Yang, J., Dong, X., Zhang, Y., and Jia, Y., 2020. Pre- liminary evaluation and correction of sea surface height from Chinese Tiangong-2 interferometric imaging radar altimeter., 12 (15): 2496.
Rodriguez, E., and Esteban-Fernandez, D., 2010. The Surface Water and Ocean Topography Mission (SWOT): The Ka-band Radar Interferometer (KaRIn) for water level measurements at all scales.–Toulouse, 782614.
Salameh, E., Frappart, F., Marieu, V., Spodar, A., Parisot, J. P., Hanquiez, V.,., 2018. Monitoring sea level and topo- graphy of coastal lagoons using satellite radar altimetry: The example of the Arcachon Bay in the Bay of Biscay., 10 (2): 1-22.
Ubelmann, C., Dibarboure, G., and Dubois, P., 2018. A cross- spectral approach to measure the error budget of the SWOT altimetry mission over the ocean., 35 (4): 845-857.
Wang, J., and Fu, L. L., 2019. On the long-wavelength validation of the SWOT KaRIn measurement., 36 (5): 843-848.
Wang, J., Fu, L. L., Qiu, B., Menemenlis, D., Farrar, J. T., Chao, Y.,., 2018. An observing system simulation experiment for the calibration and validation of the surface water ocean topography sea surface height measurement usingplat- forms., 35 (2): 281-297.
Wang, J., Fu, L. L., Torres, H. S., Chen, S., Qiu, B., and Menemen-
lis, D., 2019. On the spatial scales to be resolved by the sur- face water and ocean topography Ka-band radar interferometer., 36 (1): 87- 99.
Yang, J., Zhang, J., and Wang, C., 2019. Sentinel-3A SRAL glo- bal statistical assessment and cross-calibration with Jason-3., 11 (13): 1573.
Zhang, Y., Zhai, W., Gu, X., Shi, X., and Kang, X., 2014. Ex- perimental demonstration for the attitude measurement capabi- lity of interferometric radar altimeter.. Gdansk, 1-4.
Zhai, W., Zhang, Y., Shi, X., Dong, X., and Kang, X., 2019. A new method for estimation of baseline incline angle for double-side looking interferometric imaging radar altimeter.. Rome, 2112-2115.
J. Ocean Univ. China(Oceanic and Coastal Sea Research)
https://doi.org/10.1007/s11802-022-4434-3
ISSN 1672-5182, 2022 21 (3): 681-693
(January 3, 2020;
January 18, 2021;
February 28, 2021)
© Ocean University of China, Science Press and Springer-Verlag GmbH Germany 2022
Corresponding author. Tel: 0086-532-66781134 E-mail: oumhl@ouc.edu.cn
(Edited by Chen Wenwen)
 Journal of Ocean University of China2022年3期
Journal of Ocean University of China2022年3期
- Journal of Ocean University of China的其它文章
- Effect of Intertidal Elevation at Tsuyazaki Cove, Fukuoka,Japan on Survival Rate of Horseshoe Crab Tachypleus tridentatusEggs
- Asian Horseshoe Crab Bycatch in Intertidal Zones of the Northern Beibu Gulf: Suggestions for Conservation Management
- Experimental Investigation on the Interactions Between Dam-Break Flow and a Floating Box
- Variational Solution of Coral Reef Stability Due to Horizontal Wave Loading
- High Microplastic Contamination in Juvenile Tri-Spine Horseshoe Crabs: A Baseline Study of Nursery Habitats in Northern Beibu Gulf, China
- Influence of Autonomous Sailboat Dual-Wing Sail Interaction on Lift Coefficients