多航天器系统的编队包含鲁棒协同控制
2022-09-28 08:39李韵涵王春彦
辽宁石油化工大学学报 2022年4期
李韵涵,王春彦
(北京理工大学 宇航学院,北京 100081)
目前,关于航天器编队飞行的研究已有很多。与单航天器相比,高可靠性和适应性是多航天器系统的主要优势。为了使带有多个领队的航天器系统实现编队飞行,需要设计编队包含控制算法。
随着深空探测任务的不断深入,多航天器系统的安全性和可靠性越来越受到重视,容错控制成为了目前的研究热点,出现了一系列研究成果。文献[1-2]针对上界已知扰动下的多航天器姿态控制系统,提出了无抖振全阶滑模控制器,实现了有限时间一致。文献[3]设计了无需角速度信息的固定时间控制算法,实现了对上界已知扰动下航天器姿态角和角速度的一致性控制。文献[4-5]针对存在上界未知干扰的航天器系统,设计了基于分布式观测器的自适应控制系统。文献[6]针对存在上界未知扰动和输入饱和的航天器系统,将自抗扰和滑模控制方法结合,使航天器的姿态达到稳定。文献[7]针对存在转动惯量不确定和上界未知干扰的多航天器系统,设计自适应有限时间控制器实现了姿态跟踪。文献[8-9]研究了在转动惯量不确定、上界未知干扰和控制输入饱和条件下系统的姿态协调问题,设计了鲁棒自适应控制算法。文献[10]对自身及一阶导数有界的执行器故障影响下的航天器系统,设计了分布式快速非奇异终端滑模控制器,实现了姿态同步。文献[11]针对存在执行器故障和输入饱和的航天器系统,设计了自适应终端滑模控制器,实现了姿态一致性。文献[12]考虑航天器系统存在上界已知的外界干扰和传感器故障的情况,利用滤波器抑制传感器故障,并设计了输出反馈容错控制器,实现了姿态跟踪。
目前,对多航天器系统协同控制的研究多专注于姿态一致性控制,对编队控制算法的研究较少。文献[13]研究了多航天器在平衡点的位姿同步问题,考虑了系统存在参数不确定性和外界干扰,设计了与模型无关的无量纲串级位姿反馈自抗扰控制器。文献[14]通过引入一种新的滤波器,设计了无需速度信息的有限时间输出反馈控制器,实现了多航天器编队。文献[15]将航天器的相对位置和姿态表示在非线性流形李群上,姿态一致性和编队问题被转化为与线性空间李代数相关的误差动力学的局部稳定问题得以解决。文献[16]考虑存在输入饱和的多航天器系统,设计了固定时间非奇异终端滑模控制器,实现了固定编队。文献[17]考虑存在外界干扰的多航天器系统,设计的编队控制器,实现了固定及时变编队。
本文首先对航天器轨道动力学系统建模并线性化,然后设计自适应广义观测器估计系统状态及故障,在此基础上设计编队包含控制器并分析给出系统稳定的充分条件,最后通过仿真验证所提算法的有效性。
1 问题描述
1.1 航天器轨道动力学模型
考虑一组包含N个航天器的系统,将每个航天器视为一个刚体,多航天器系统在圆轨道上运行,且航天器之间的距离远小于航天器与地心之间的距离,可给出第i个航天器轨道动力学的C-W方程为[18]:

式中,xi、yi和zi分别为航天器在本体坐标系三个轴上的坐标,i=1,2,…,N;ẋi、ẏi和żi分别为航天器在三个轴上的速度;ẍi、ÿi和z̈i分别为航天器在三个轴上的加速度;axi、ayi和azi分别为航天器在三个轴上的控制输入加速度;ω0为航天器沿轨道运行的平均速率。
令系统状态为Xi=[xi,yi,zi,ẋi,ẏi,żi]T,控制输入为ui=[axi,ayi,azi]T,系统输出为Yi=[xi,yi,zi,0,0,0]T,则式(1)可表示为:

其中,

1.2 航天器轨道动力学系统
考虑由N个跟随航天器和M个领队航天器组成的系统,第i个跟随航天器的动态方程为:

式中,Xi∈Rn、Yi∈Rq分别为跟随航天器的系统状态和系统输出;fai∈Ra为执行器故障;fsi∈Rs为传感器故障;Da∈Rn×a、Ds∈Rq×s分别为执行器和传感器的常数矩阵。
第k个领队航天器的动态方程为:

式中,Xk∈Rn、Yk∈Rq分别为领队航天器的系统状态和系统输出,k=1,2,…,M。
航天器之间的通信拓扑图由G(ν,E)表示,其中ν表示航天器,E表示两个航天器之间的连线。对于包含N个航天器的系统,邻接矩阵定义为A=[aij]N×N∈RN×N。若存在从航天器j向航天器i的连线,则aij=1;否则aij=0。拉普拉斯矩阵L=[lij]N×N定义为,当i≠j时lij=-aij。
假设1:航天器之间通过有向图进行信息交互,通信拓扑图是连通的,并且领队航天器至少与一个跟随航天器单向通信。
假设2:执行器故障fa是未知但有界的,一阶导数满足
假设3:传感器故障fs是未知但有界的。
定义1[19]对于多航天器系统(3),当满足以下条件时,此系统可利用控制器u(t)=KX(t)实现L2干扰抑制。
(1)当fa(t)≡0且fs(t)≡0时,系统(3)是渐近稳定的。
(2)当fa(t)和fs(t)不 为0时,对 于 任 意t≥t0≥0,存 在 标 量κx使
其中,正标量(t0)由t0时刻系统的初始状态所决定,并且增益方程(·)是正定的。
引 理1[20]对 于 一 个 正 定 矩 阵P,以 及 系 统 状 态x:[a,b]→Rn,其 中a,b∈R并 且b>a,则:成立。
引理2[21]对于一个正定矩阵P,以下等式成立,其中,α>0是一个标量,并且R=-AT P-PA+αP。
在此基础上,如果R是一个正定矩阵,那么对于∀t>0有eATt PeAt≤eat P。
本文的控制目标是为多航天器系统设计基于自适应广义观测器的编队包含控制算法,使跟随航天器能够对领队航天器实现编队跟踪和包含。
2 编队包含协同控制算法
2.1 自适应广义观测器设计

自适应广义观测器设计为:

由此可知:


根据式(5)中的第一个方程和式(7)中的第一个方程,可得:

定义第i个观测器的观测器误差为:

式中,exi(t)是第i个观测器的系统状态估计误差;eωi(t)是第i个观测器的传感器故障估计误差。
定义第i个观测器的执行器故障估计误差为:

根据式(8)-(9),可得:


由于ω(t)和f.(t)是有界的,通过选择增益矩阵L,使为Hurwitz矩阵,观测器误差可以收敛到零的邻域,并且通过增大M矩阵和αa的值能够提高观测器性能。
2.2 编队包含协同控制器设计
编队跟踪误差定义为:

式中,hi(t)为队形向量;σk为大于零的常数且满
χi(t)的导数可表示为:

基于观测器输出的系统状态估计值,编队包含协同控制器设计为:

式中,K∈Rq×n为控制器增益矩阵;vi(t)满足Bvi(t)+Ahi(t)-ḣi(t)=0。
基于上述定义的观测器误差和编队跟踪误差,式(15)可进一步表示为:

将控制器(16)代入式(14)得:


引理3[22]由假设1可得,Lˉ为正定矩阵,并且可以构造一个正定对角矩阵G=diag{α1,α2,…,αN}满足不等式其中为大于零的常数。
控制器增益矩阵K设计为:K=-BTP1,其中P1为正定矩阵。
2.3 算法一致性与稳定性分析
在给出算法一致性分析之前,给出如下引理,便于后续的证明。
引理4式(17)中‖Δ‖2项的上界为其中ρ满足以下不等式:

定理1在满足假设1、2和3的条件下,如果存在正定矩阵P1、P2以及常数κi,κx>0,i=1,2,…,8,使矩阵不等式式(19)-(22)成立,多航天器系统(3)和(4)可在自适应广义观测器(6)和编队包含协同控制器(15)下实现L2容错编队包含控制。
证 明Lyapunov函 数 设 计 为V=V1+V2+V3,其 中V1=χT(G⊗P1)χ,V2=eT(I⊗P2)e,V3=
将V1对时间求导可得:

根据引理3可得:

将V2对时间求导可得:
根据式(22),将V3对时间求导可得:

将V对时间求导可得:

根据Schur补引理,不等式(23)可被转化为H1<-κx I。结合矩阵不等式(19)-(21),可得:

(1)当执行器和传感器不存在故障时,fi(t)≡0,ωi(t)≡0,可得且ι=0,故(t)<0。由此可知,系统编队跟踪误差收敛到零。
(2)当执行器和传感器存在故障时,fi(t)∈Lm2[0,∞)和ωi(t)∈Lm2[0,∞)不为零,对不等式(24)积分可得:
3 仿真研究
多航天器系统由两个编号为5、6的领队航天器和四个编号为1-4的跟随航天器组成。航天器之间的通信拓扑图如图1所示。
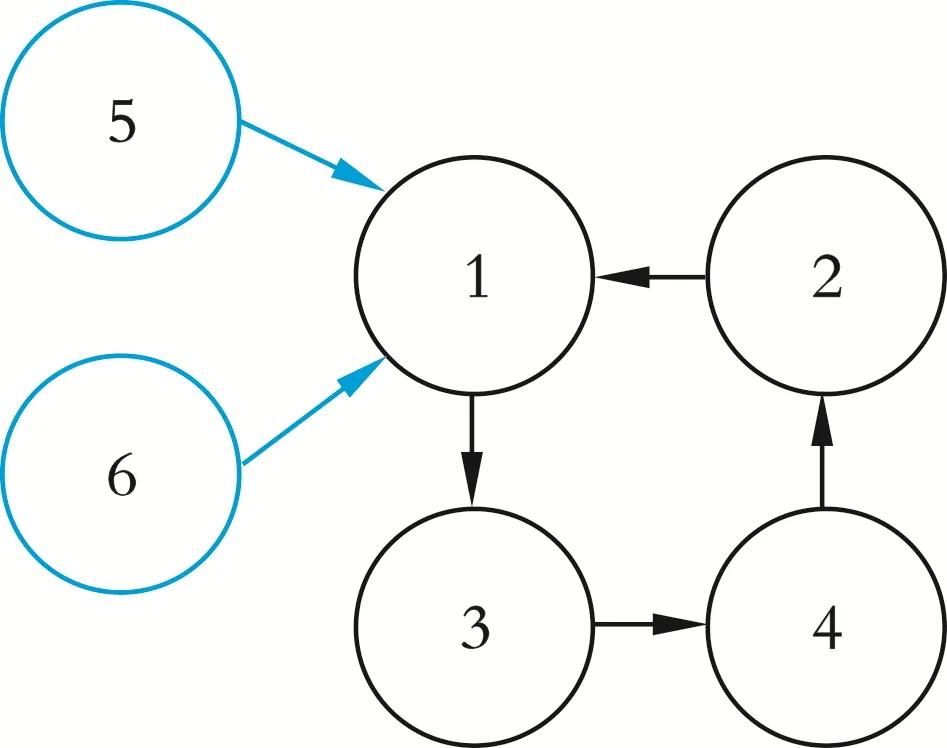
图1 航天器之间的通信拓扑图
领队智能体与跟随智能体的通信矩阵为B=diag{2,0,0,0}。领队航天器和跟随航天器的初始状态设定为:

初始状态前三项表示航天器在三个轴上的坐标,后三项表示航天器在三个轴上的速度。
航天器质量均为40 kg,在高度为1 000 km的近地圆轨道运行,平均速率设定为ω0=0.001。航天器采用反作用力飞轮作为执行器,采用加速度计作为传感器。执行器和传感器故障的系数矩阵设定为Da=[0,0,0,0.05,0.05,0.05]T,Ds=[0,0,0,1,1,1]T。
为了便于控制算法的验证,选取满足假设2的执行器漂移故障fa(t)=0.2sin(t),以及满足假设3的传感器测量噪声均值为0,且方差为0.5的随机信号。
编队跟踪误差中的参数设定为σ5=0.75,σ6=0.25,即航天器5的状态信息对跟随者更重要。队形向量设定为
队形向量前三项表示航天器在三个轴上相互之间的距离,后三项表示航天器在三个轴上速度的差值。多航天器系统在X-Y平面进行编队包含控制,由于航天器在Z轴上的坐标各不相同,故不存在碰撞的可能性。
非奇异矩阵设置为M=100×I6,并且选择适当的L矩阵使是Hurwitz的,即特征值实部均为负数。设定学习速率矩阵为αa=100,通过求解定理1中的矩阵不等式条件,可得Ka=0.1,并且控制器增益矩阵为:

航天器的运动轨迹如图2所示。图2中,标记了t∈{0,200,300,400,500}s处的位置,领队的位置用星号标记,队形的中心用三角形标记,跟随者的位置用圆圈标记。航天器的执行器故障及其估计值如图3所示。从图2可以看出,基于自适应广义观测器的编队包含协同控制算法下,队形的中心更靠近航天器5,并且领队与跟随者可以实现并保持预定队形。从图3可以看出,估计的执行器故障与真实值在短时间内达到一致。
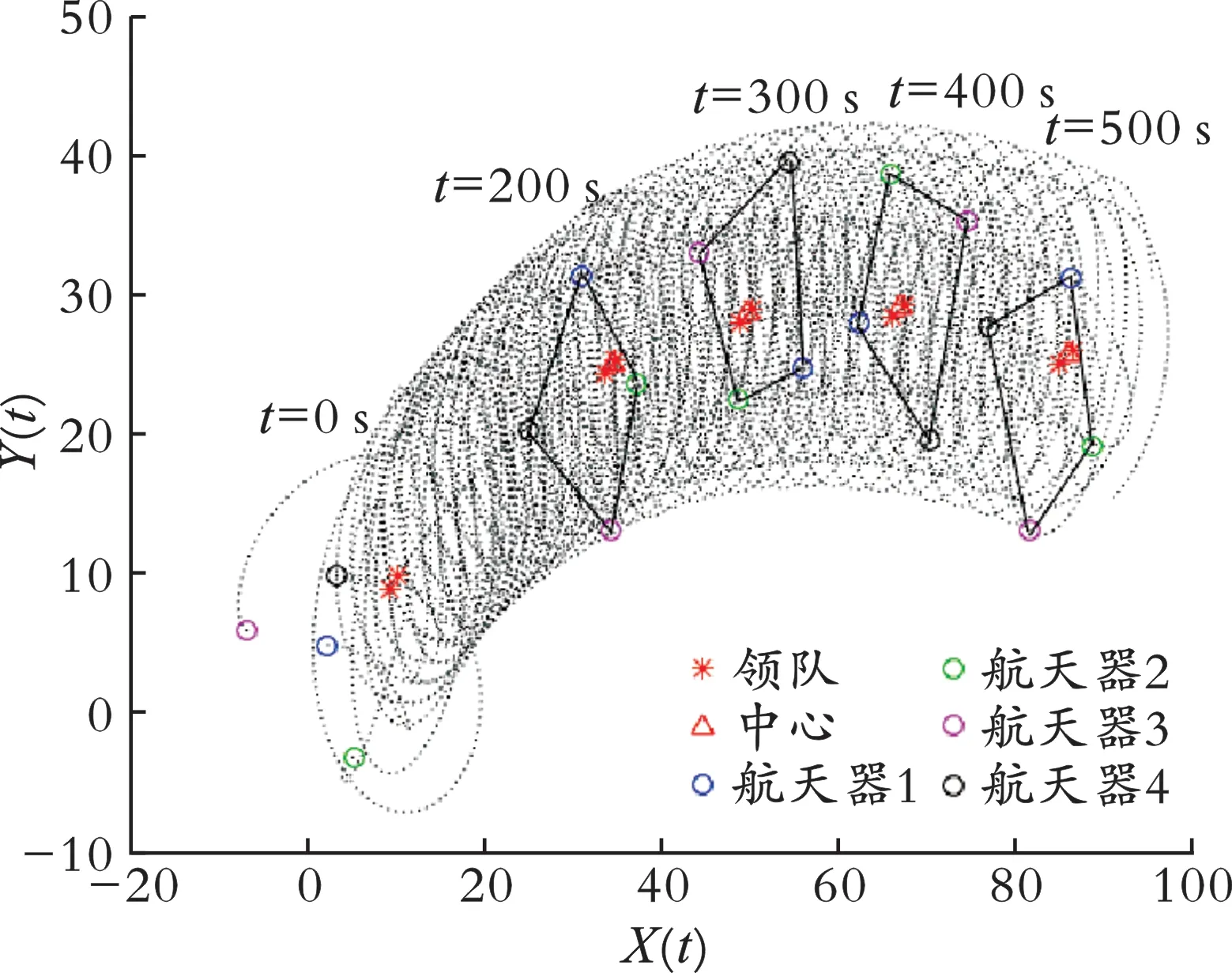
图2 航天器的运动轨迹

图3 航天器的执行器故障及其估计值
自适应广义观测器下航天器位置和速度的估计误差如图4-5所示。从图4-5可以看出,在选择适当观测器参数的情况下,估计误差可以达到有界收敛。
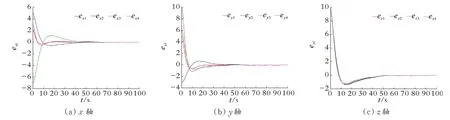
图4 航天器位置估计误差
航天器的控制力曲线如图6所示。从图6可以看出,控制力在短时间内收敛到了零的邻域,为了保持时变编队,航天器的控制力矩不为零。

图6 航天器的控制力曲线
当多航天器系统存在执行器和传感器故障时,采用基于自适应广义观测器的编队包含协同控制算法,使跟随航天器跟踪并包围领队航天器,实现鲁棒控制的目的。

图5 航天器速度估计误差
4 结论
针对执行器和传感器故障下的多航天器编队飞行问题,提出了基于自适应广义观测器的编队包含协同控制算法,实现了对系统状态和故障的估计,进而使航天器形成并保持预设编队的包含关系。通过仿真案例,验证了所提出算法在多航天器系统协同控制中的有效性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
微电机(2022年8期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
火力与指挥控制(2022年6期)2022-07-25
计算机与数字工程(2022年4期)2022-05-10
机械科学与技术(2022年2期)2022-03-30
科技风(2021年10期)2021-04-18
中国测试(2018年9期)2018-05-14
科技视界(2017年15期)2017-10-28
科技视界(2016年2期)2016-03-30