
一种磁流变阻尼器机械滞后模型建立与实验验证
2022-12-20 15:44刘月辰黄山云
噪声与振动控制 2022年6期
刘月辰,黄山云,王 强
(1.中国海洋大学 工程学院,山东 青岛 266100;2.元珵科技(北京)有限公司,北京 100070)
磁流变阻尼器(Magnetorheological Damper,MRD)是利用磁流变液的流变可控特性研制的一种半主动阻尼元件,与传统阻尼器相比,具有能耗低、出力大、响应快速、阻尼力连续可调等优点[1],因此被广泛应用于半主动控制领域。在利用MRD 进行半主动控制时,研究其动态特性并建立其准确的模型是获得期望控制力的关键。
自MRD诞生以来,学者们对于其准确数学模型的建立进行了大量研究,如伪静力模型、参数化模型和非参数化模型。但是由于MRD具有强非线性,难以保证模型同时具有较高精确度和较简单的形式[2]。伪静力模型很好描述了MRD力与位移的关系,但是对MRD力与速度的非线性关系无法很好描述;非参数化模型的物理意义不明确,过度依赖于实验数据;参数化模型不仅能够很好地描述MRD力与速度、位移之间的关系,还具有明确的物理意义,在阻尼器模型的研究中占有重要地位。
对MRD 参数化模型的研究始于伪静力模型的不足。1987 年,Stanway 提出理想化的力学模型即Bingham 模型,以库伦阻尼力和黏性阻尼力描述MRD输出阻尼力的组成,从此基于实验数据拟合的参数化动力模型开始盛行[3]。之后,各种基于实验拟合和函数拟合的动力学模型开始出现,其中以Sigmoid函数、Tanh函数等研究较多[4-7]。
本文在前人研究的基础上,分析多工况下MRD动态实验曲线,发现MRD在低速状态和速度变向时输出阻尼力发生突变,这种现象在多名学者的研究[8-10]中皆有表现。为了建立更加精确的MRD动态模型,针对突变现象进行分析,并基于简化后的Tanh模型建立MRD 的机械滞后动态模型,为MRD 在稳态输入下的动态特性描述和半主动控制提供了基础。
1 试验与模型的建立
1.1 MRD动力性能测试
采用INSTRON8802 材料性能试验机对某驾驶室悬置系统用磁流变阻尼器进行动力特性测试,装置通过力传感器实时采集输出阻尼力,通过位移传感器采集输入位移,数据保存在数据采集仪内,阻尼器安装位置和实验设备如图1所示。
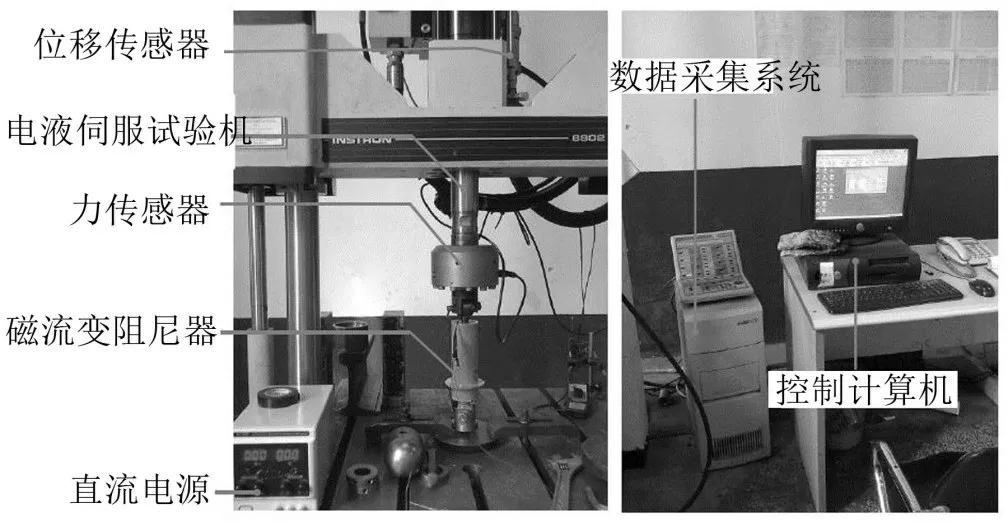
图1 MRD动力特性测试装置
MRD 动力性能实验中材料性能试验机的输入参数如表1所示,总计72种工况。

表1 MRD动力性能测试实验输入参数
1.2 MRD动态特性分析
为了更好地研究磁流变阻尼器的动态特性,选取一组激励频率和激励幅值,研究不同电流输入条件下MRD 的输出阻尼力与输入位移和输入速度的关系,MRD测试曲线如图2所示。
如图2(a)所示,阻尼力-位移曲线大致成矩形,其面积为一个周期内阻尼器消耗的能量,记为E。耗能E的值随电流增大而增大,且为非线性,当通电电流到达0.5 A 时,由于磁场饱和,矩形面积不再增大,此时MRD 输出阻尼力达到峰值,一个周期内消耗能量达到最大。同时,在活塞位移达到两个极限值时,阻尼力出现突变,且该现象与输入电流相关性不大。
如图2(b)所示,阻尼力-速度曲线表现出明显的滞回特性,在低速区存在较大的滞回环,且随着输入电流的增加,MRD 在低速状态下滞回环变大,此为MRD的传统特性。
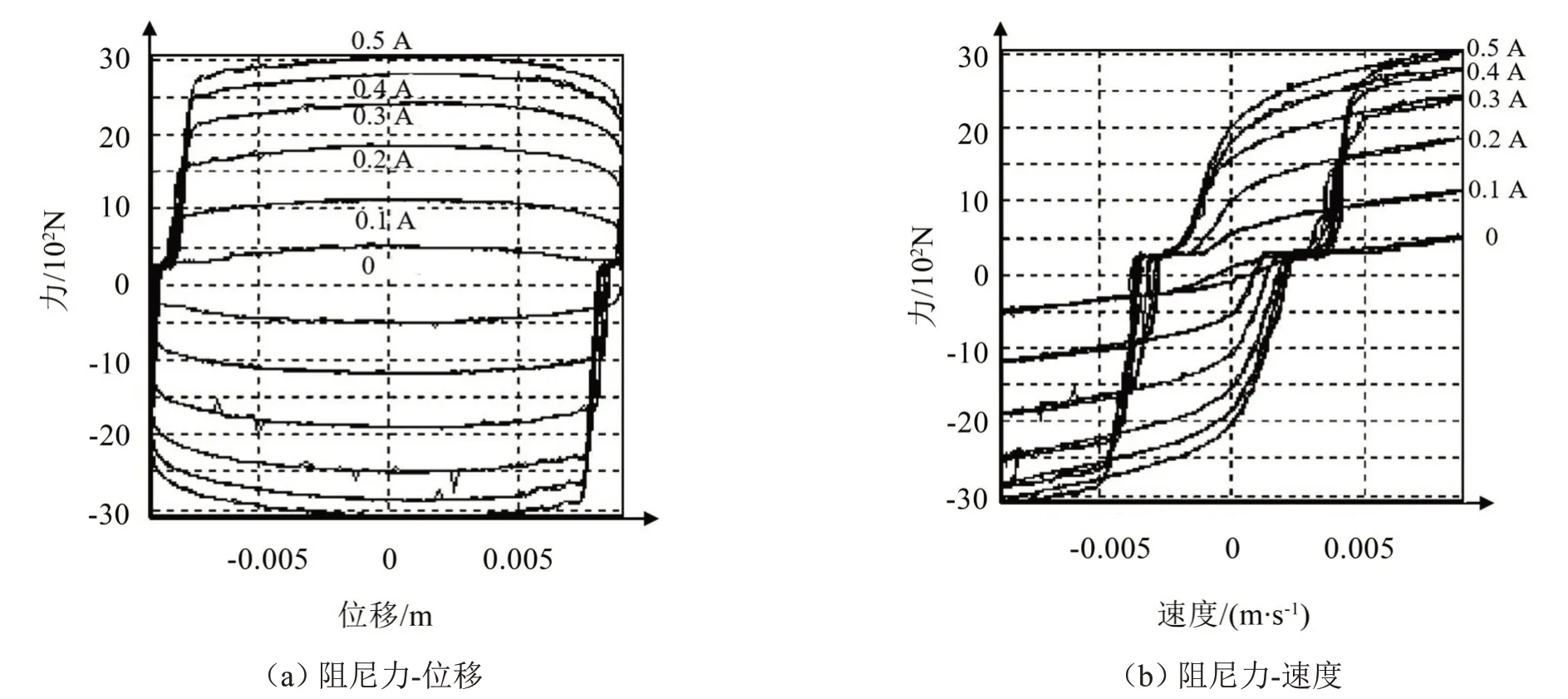
图2 激励频率为1.5 Hz、幅值为9 mm时MRD测试曲线
1.3 机械滞后模型
通过对72 种工况下得到的实验数据进行分析可知,MRD 在低速状态和速度方向改变时,阻尼力会出现突变现象。研究发现,阻尼力的突变主要是由机械系统的刚度突变引起的,而机械系统刚度的突变受阻尼器的间隙和系统柔度的影响较大。
为了准确表示磁流变阻尼器的阻尼力突变特性,以弹性压缩阶段、流变阻尼阶段、弹性释放阶段和间隙跳跃阶段共4 个阶段划分MRD 在循环载荷激励下的工作状态,并基于此工作模式和简化后的双曲正切模型建立基于机械滞后的MRD动力模型,简称为DSTH模型,具体划分如图3所示[11]。
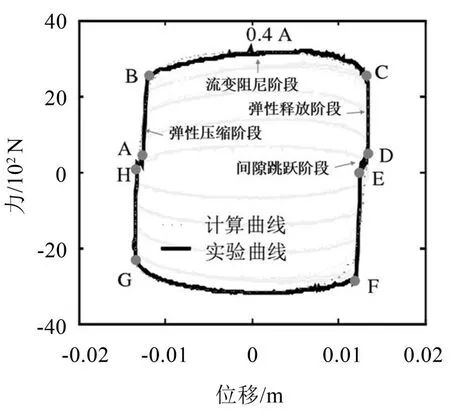
图3 MRD动态特性4个阶段划分图
假定磁流变阻尼器自A 点开始工作,此时活塞处于极限位置,将活塞受压缩所储存的力记为弹性力,将活塞与缸体之间的力记为阻尼力。A→B 阶段:活塞速度由0 逐渐增大,此时处于弹性压缩阶段,弹性力小于阻尼力,活塞位置基本不变;B→C阶段:活塞到达B状态时,此时弹性力增大到与阻尼力相等,活塞在B点之后开始移动,此时阻尼器处于流变状态,即流变阻尼阶段,到达C点速度降为0;C→D 阶段:活塞到达C 点后,活塞开始换向,但是由于阻尼力的存在,活塞位置基本不变,A→B 阶段储存的能量在此阶段释放,直到弹性力等于阻尼力,此时活塞将位于D 点,此阶段为弹性释放阶段。图4 所示为MRD工作时的4种状态,以上阶段对应磁流变阻尼器处于图4(b)和图4(c)两种状态,两状态均可分为3个步骤:对于图4(b)来说,此时活塞与活塞杆的间隙为0,弹性元件kc开始被拉长,即为拉长储能状态,当Fc=Fb时,活塞开始移动,即为流变阻尼阶段,此时Fc≥Fb,当再次达到Fc=Fb时,弹性元件kc由拉长状态逐渐回复到原长,此为放能阶段;对于(c)来说,步骤相同,但储能方式可理解为压缩储能。对于以上阶段传统模型均能准确描述,如Tanh模型等。D→E 阶段:此阶段由于间隙的存在,活塞杆移动速度很快,称为跳跃现象,到达E 点,此阶段称为间隙跳跃阶段,如图4所示,弹性元件kc基本处于原长状态,此时MRD处于图4(a)和图4(d)两种状态,以间隙中点为分界线,此阶段为间隙跨越阶段;E→A为4个阶段的重复。

图4 机械滞后模型的4种状态
根据所划分阶段建立DSTH 模型示意图如图5所示。
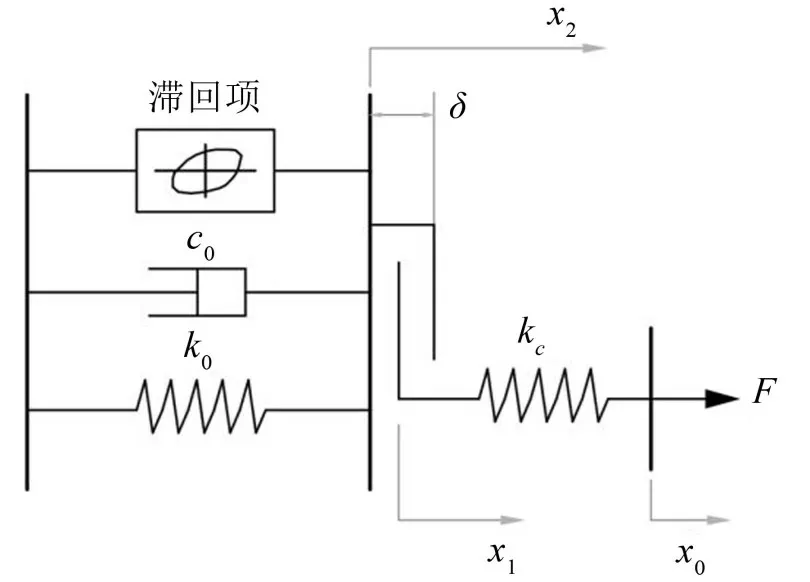
图5 DSTH模型示意图
建立DSTH数学模型如式(1)、式(2)所示。

式(1)、式(2)中:δ为间隙量;L0为弹性元件kc的原始长度;c0、k0、α为与电流有关的变量;x0、x1、x2为与活塞和活塞杆运动有关的位移;Fc为弹性力;Fb为磁流变阻尼力;F0为间隙跳跃时的力。
对72 组实验数据进行分析,发现δ与kc的值与激励条件等无关,且在该MRD中取值约为0.001 m、6.5×106N/m,而k0通过计算也证明其可以忽略,L0可以在初始化过程中舍去。
2 模型对比分析
为了使对比结果更加具有普遍性,选取9 mm、1 Hz工作情况下输入不同电流时的试验测试结果,绘制计算结果与实验数据对比图。
2.1 Bingham模型
基于磁流变液的Bingham 伪静力学模型,利用阶跃函数来区分描述活塞拉伸及压缩行程,Stanway[11]等提出了非线性的动力学模型,该模型由一个库仑力和一个黏性力组成,来描述磁流变阻尼器的阻尼力特性。Bingham模型是较为常用的磁流变阻尼器动力学模型,其模型表达式如式(3)所示。

式中:c0为阻尼系数,fc是与磁流变液屈服应力有关的库伦阻尼力,f0是由于补偿器存在而产生的力,可忽略。
Bingham 模型认为磁流变液在屈服前是刚性的,即磁流变液受力小于屈服应力时,不会产生变形,这大大简化了模型的复杂程度,使Bingham模型每个参数都有真实的物理意义,本文简称Bingham模型为BH模型。
利用MATLAB 遗传算法工具箱,识别BH 模型中主要参数,拟合模型计算结果与实验数据对比图如图6 所示,结果表明:BH 模型对速度与阻尼力的关系描述精度不足,特别是在低速时,无法描述MRD的滞回特性。
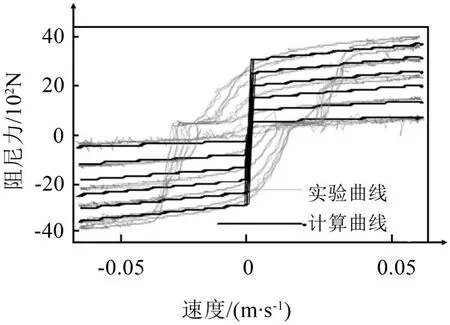
图6 MRD特性实验与BH模型计算曲线对比
2.2 Sigmoid函数模型
Sigmoid 函数的曲线与磁流变阻尼器库伦阻尼力-速度曲线的线型非常接近,因此,可以用Sigmoid函数的表达式描述磁流变阻尼器的动态特性,库伦阻尼力如公式(4)所示[12]。

式中:Fm表示最大屈服力,β表示指系数且大于零,Fm和β是电流和振幅的系数,表示速度。考虑黏性阻尼力,输出阻尼力如式(5)所示。

如图7 所示,对比实验数据与SMD 模型的计算数据,结果表明:SMD模型相比BH模型有效地改善了低速时模型的描述精度,同时很好地拟合了高速时的特性。
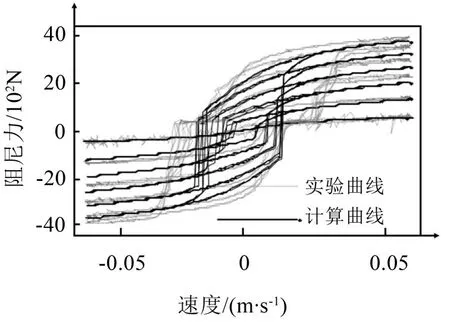
图7 MRD特性实验与SMD模型计算曲线对比
2.3 Tanh模型
磁流变阻尼器的双曲正切模型只有一个,用来表述滞后的双曲正切函数参数较少,模型相对简单,对部分磁流变阻尼器同样有较好的建模精度。阻尼和刚度则具有线性特性,简称为TH 模型[13],其阻尼力如式(6)所示。

式中:c为黏性阻尼系数,k为弹性系数,α为滞环高度系数,β为滞环陡度系数,delta为滞环宽度系数,f0为因补偿器存在而产生的力,均为电流的函数。
如图8所示,对比实验数据与TH模型的计算数据,结果表明:TH 模型比SMD 模型具有更高的精度,而且曲线连续光滑。

图8 MRD特性实验与TH模型计算曲线对比
2.4 简化的Tanh模型
为了简化对MRD 半主动控制过程中逆模型的求解,由于参数β、δ受电流影响不大,可以将双曲正切函数中的参数β、δ假定为常数,得到简化的Tanh模型(简称STH模型),其表达式如式(7)所示[14]。

如图9所示,STH模型保留了TH模型高速时对MRD 动态特性的描述精度,且降低了参数的复杂度。

图9 MRD特性实验与SBH模型计算曲线对比
2.5 机械滞后模型
如图10 所示,对比实验数据与DSTH 模型的计算数据,结果表明:DSTH模型不仅具有STH的描述精度,同时对阻尼力突变现象具有很好的描述。
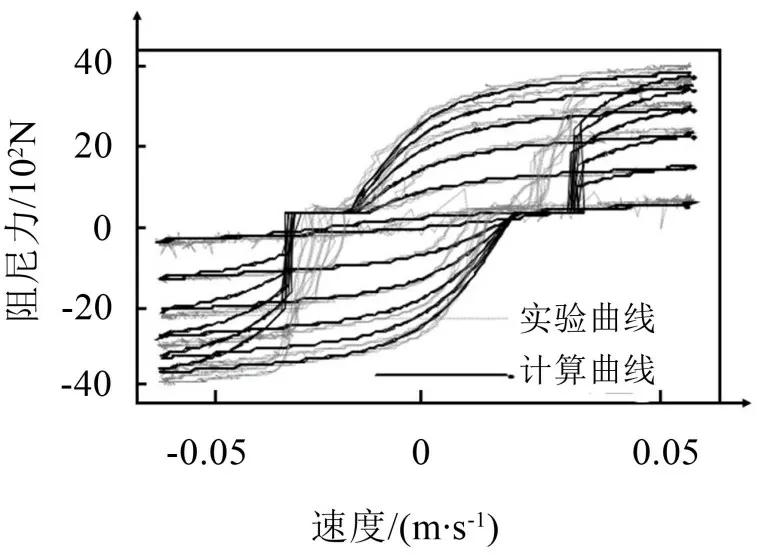
图10 MRD特性实验与DSTH模型计算曲线对比
3 模型精度对比分析
本文将实际阻尼力与计算阻尼力的绝对误差的均方根值作为精度的判定标准,取3 个典型的运行周期的平均值作为某一工况下的模型误差,其表达式如式(8)所示。

其中:Ek为第k种激励工况下模型误差;Fij为i种电流工况下的第j个计算阻尼力值;fij为第i种电流工况下的第j个实验阻尼力值。
5 种模型的精度结果如图11 所示,从图中可以看出,BH模型误差最大,最小误差为0.15,最大误差为0.24,平均误差为0.19;SMD 模型误差次之,最小误差为0.11,最大误差为0.23,平均误差为0.15;TH模型和STH 模型具有较高的精度且两者相差不大,平均误差约为0.086;DSTH模型精度最高,平均误差约为0.741。
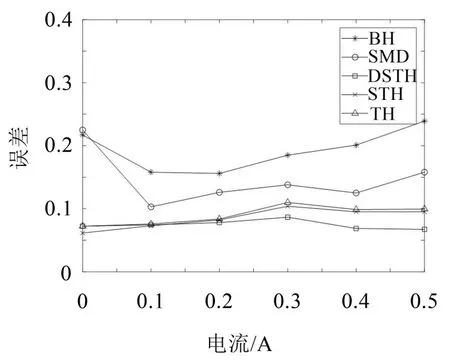
图11 5种模型的精度曲线
4 结语
本文基于MRD 动态特性实验中出现的阻尼力突变现象,提出了一种体现机械滞后的MRD动态模型,并基于实验测试和模型拟合,将绝对误差的均方根值作为精度评价标准,对比了BH 模型、SMD 模型、TH模型、STH模型和DSTH模型的模型精度,结果表明:
(1)DSTH模型很好地描述了MRD在稳态谐波激励下出现的阻尼力突变现象,提高了模型在低速状态时对MRD动态特性的描述精度。
(2)与其它模型相比,DSTH 精度较高,为以后基于MRD 的半主动控制提供了较为精确的模型参考。
(3)与STH模型相比,DSTH模型增加了求解参数个数,且具有分段函数,增加了模型的复杂性,求逆较为困难。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
疯狂英语·初中天地(2022年9期)2022-08-29
农业工程技术(2022年1期)2022-04-19
建材发展导向(2022年5期)2022-04-18
北京理工大学学报(2020年11期)2020-12-15
工业安全与环保(2020年10期)2020-11-05
太原理工大学学报(2015年3期)2015-12-17
噪声与振动控制(2015年4期)2015-01-01
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2014年4期)2014-02-27
