
基于自适应FLANN的频率不匹配应对方法
2022-12-20 15:42王枝鑫
噪声与振动控制 2022年6期
王枝鑫,刘 剑
(1.南京航空航天大学 自动化学院,南京 211106;2.南京航空航天大学 高速载运设施的无损检测和监控技术工信部重点实验室,南京 211106)
随着现代社会的发展,噪声污染日益严重。传统的被动消声装置在应对低频噪声时造价昂贵,体积庞大,而主动噪声控制(Active noise control,ANC)技术因其在抑制低频噪声方面的优越性而受到广泛的关注[1-3]。ANC 是利用声波的相消干涉原理,针对信号源(主波)产生一个与其幅值相同、相位相反的参考波(次波),两声波相互叠加,达到噪声抑制的目的[13]。
在窄带前馈ANC系统中,为避免声反馈,往往采用非声学传感器(如转速计、加速度计)获取噪声频率进而产生参考信号[1]。由于元件老化或环境温度的影响,所获取的参考信号频率与目标噪声的真实频率之间容易存在误差,即产生了频率不匹配(Frequency mismatch,FM)[4]。这种误差只会严重降低窄带前馈ANC 系统的降噪性能,即使只有1%的误差存在,传统窄带ANC系统降噪性能也会急剧下降[5]。此外,初级噪声信号的非平稳也是常见的且对系统噪声抑制性能同样有严重影响。如风扇、引擎和大规模切割机械等旋转设备在进行换挡、变速等操作时,初级噪声信号幅值和频率会随着时间的变化而变化,造成噪声信号的非平稳,使得系统追踪能力的稳定性降低[5]。
Xiao 等针对FM 问题,提出利用2 阶自回归(Autoregressive,AR)模型对参考信号进行建模,并通过最小均方(Least Mean Square,LMS)误差算法更新模型参数[4,6],通过参数的不断调整,使得参考信号频率逐步逼近真实信号频率。该方法结构简单,计算复杂度低,能够应对一定程度的FM,但当频率失调信号为非平稳信号时,该方法对频率跟踪能力下降[7]。常见的ANC系统均采用信号发生器产生参考信号,Ho 等[8]在不依赖于信号发生器的情况下设计了1种与自适应线性增强器相结合的窄带ANC系统,此方法可应对20 Hz 以内的FM,为降低计算复杂度而只计算基波频率,此种处理手段仅适用于基波和谐波频率的处理。另外,变步长算法[9]也可用于应对一定程度的FM,但由于其步长不稳定,因而存在鲁棒性较差的问题。实际上,通过对FM 的深入分析已知,控制滤波器权值或系统的均方误差(Mean Square Error,MSE)是频率不匹配量的非线性函数[10-11]。显然,FM 问题可被视为1 种非线性失调,典型的用于应对非线性失调的非线性滤波器包括Volterra 滤波器[12]以及函数链人工神经网络(Functional Link Artificial Neural Network,FLANN)[13-15]等。
本文基于AR模型对系统进行改进设计,提出1种基于自适应FLANN 的应对FM 的新系统。通过仿真,对新系统所能应对的FM 量以及引入非平稳初级噪声时的性能进行分析。在对初级噪声的非平稳进行建模过程中,充分考虑了频率随时间线性变化的情形。
1 传统组合器型窄带ANC系统
典型的组合器型窄带ANC 系统如图1 所示[1],目标噪声信号p(n)为:

图1 传统窄带前馈ANC系统

其中:ωp,i为窄带噪声频率的第i个频率分量,q为频率成分个数为离散傅里叶系数(DFC),vp(n)为加性环境噪声,一般取均值为0、方差为的高斯白噪声。
对于第i个频率通道,按式(2)给出参考信号:

其中:ωi为根据非声学传感器(如转速计等)获得的由同步信号转换而来的频率值;ai和bi为幅值系数。第i个频率通道次级信号yi(n)由相应参考信号经过系数为的线性组合器合成得到:

基于滤波-X 最小均方(FXLMS)算法的线性组合器系数更新方程为:

其中:μi为步长因子为滤波-X参考信号,由参考信号经过次级通道S(z)的估计而得,其表达式为:

式(8)中:M和分别为次级通道S(z)的长度和单位冲击响应系数。
系统残余噪声信号e(n)通过式(10)计算得到:
则系统n时刻的MSE为e2(n)的期望,即:

对于自适应系统性能的仿真评价,通常在有限次(如40 次、100 次、200 次等)独立计算机实验后以e2(n)的集平均作为MSE(n)的估计,即:

其中:T为所进行的独立计算机实验次数,et(n)为根据第t次独立计算机实验计算得到的系统误差。若以分贝值呈现,MSE(n)按式(13)计算:

本文中,取T=40。
当系统中存在FM,即Δωi=ωp,i-ωi≠0时,FM量定义为:

当系统中不存在FM时,图1所示系统对窄带噪声具有良好的抑制效果。而当系统中仅有1%FM时,窄带噪声抑制性能将受很大制约[4]。
2 基于FLANN的窄带ANC系统
1种简单有效的应对FM的基本系统是采用2阶AR 模型,由该模型产生参考信号[4,6]。在此基础上,为进一步提高系统应对FM 的性能,本文设计了一种基于自适应FLANN 滤波器的窄带ANC 系统,如图2所示。
在图2 所示系统中,2 阶AR 模型用于在给定失真频率初始值条件下自动跟踪目标噪声信号并产生参考信号xa(n)和xb(n):
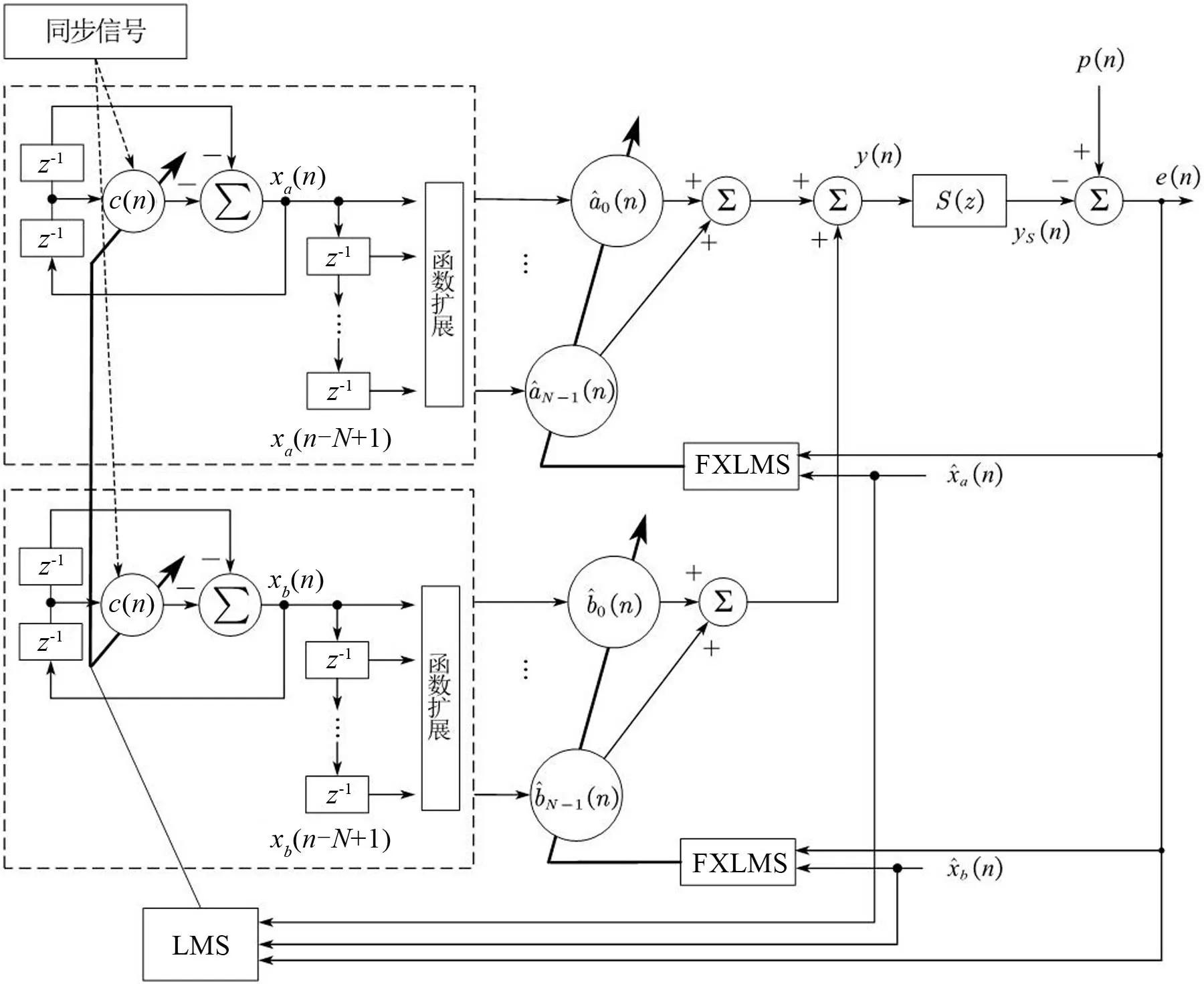
图2 基于FLANN的单频率通道窄带ANC系统
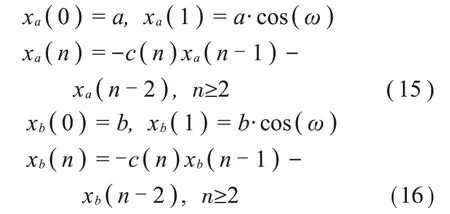
其中:c(n)为AR 模型的自适应参数,其初始值为c(0)=c(1)=-2cos(ω)。
参考信号经过自适应FLANN 滤波器生成次级源信号y(n),其由两部分构成:

其中:
次级源信号y(n)经过次级通道S(z)输出次级噪声信号ys(n),ys(n)与目标噪声信号p(n)叠加相消,得到系统残余噪声e(n):

滤波器权值wa(n)和wb(n)以及AR 模型自适应参数c(n)分别通过FXLMS 算法以及LMS 算法更新。经最速下降原则推导出这些参数的更新方程:
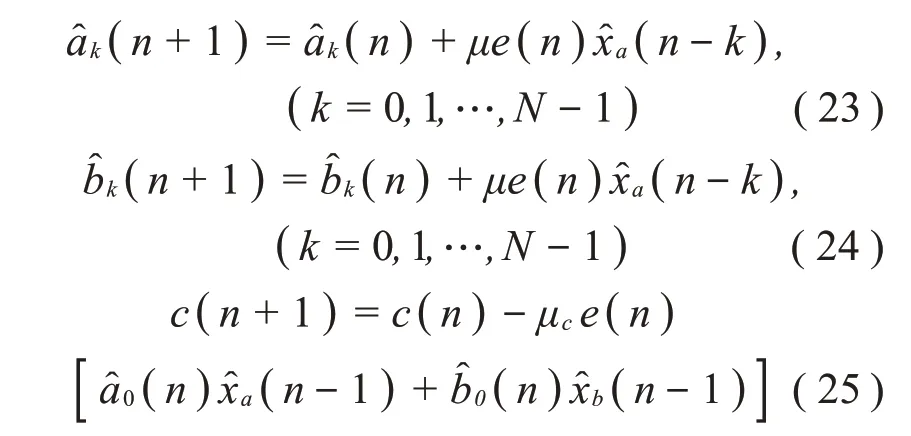
其中,μ和μc为相应更新步长因子。
3 仿真结果与分析
为了模拟实际声学环境中窄带噪声的变化情况,在应对FM的仿真中,同时考虑了频率非平稳情形,典型情形为频率随时间发生慢速或快速线性变化。
仿真中,次级通道S(z)被设定为截止频率等于0.4π 的FIR 低通滤波器。利用离线LMS 算法对次级通道进行辨识得到其估计模型(z)[1-2]。研究表明,次级通道S(z)的辨识误差对整个窄带ANC系统的性能并不起决定性作用,且影响很有限[15]。因此,为简便起见,(z)与S(z)的长度取为一致。
此外,用于产生初级噪声信号及参考信号的基本参数设置如表1所示。当初级噪声中的加性高斯白噪声能量给定为0.01 时,在窄带噪声完全被抑制的理想情况下,系统稳态残余噪声能量为-20 dB。为验证系统对不同FM 量的应对能力,考虑1%FM和5%FM两种情形。
根据表1 的参数设置,若M==12,则S(z)和均为11 阶的FIR 低通滤波器。当截止频率为0.4π时,S(z)的单位冲击响应系数为:
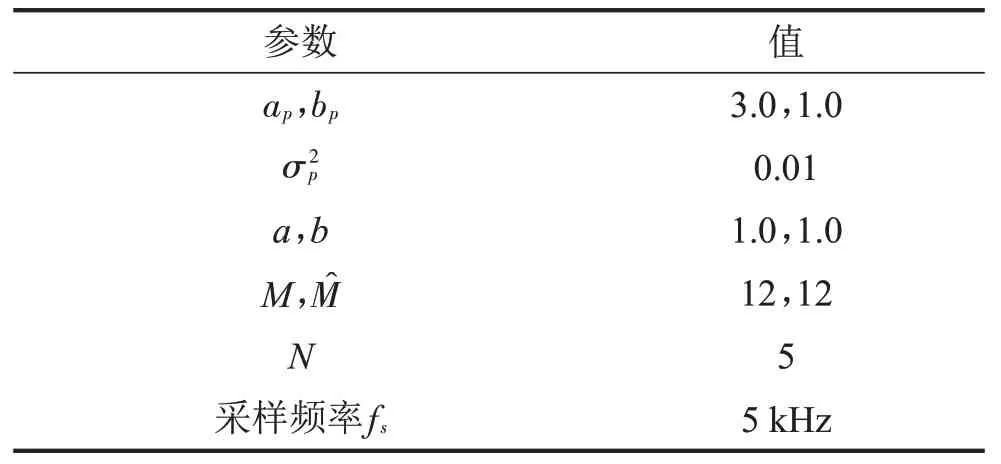
表1 用于产生初级噪声信号及参考信号的基本参数设置

利用LMS 离线系统辨识方法对S(z)进行辨识可得到的单位冲击响应系数与相同。
3.1 频率恒定
噪声频率不随时间而改变,取为200 Hz,即ωp=0.08π。对于两种系统,步长均设为一致,即μ=μc=0.002。系统MSE变化曲线如图3所示。显然,针对不同%FM 情形,新系统均比仅有AR 模型的系统收敛要快,且稳态MSE 更小,新系统具有更理想的降噪效果。另一方面,随着FM 的增加,根据稳态MSE可知,仅有AR模型的系统性能随之下降,而新系统表现出很好的适应性,稳态MSE 均接近-20 dB。
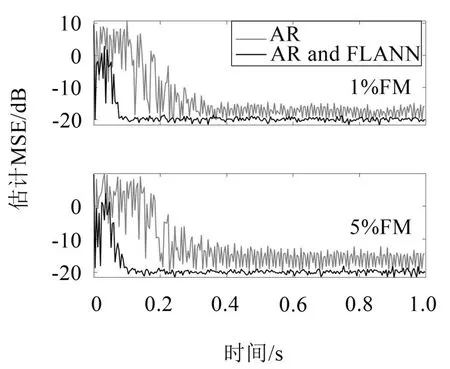
图3 频率恒定时系统MSE变化曲线
3.2 频率慢速变化
初级噪声信号频率按照式(26)慢速线性变化,其模型如图4所示。
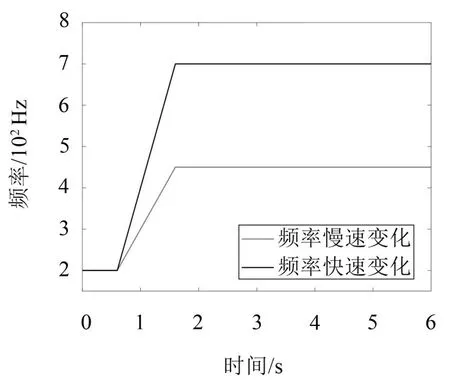
图4 初级噪声信号频率变化曲线
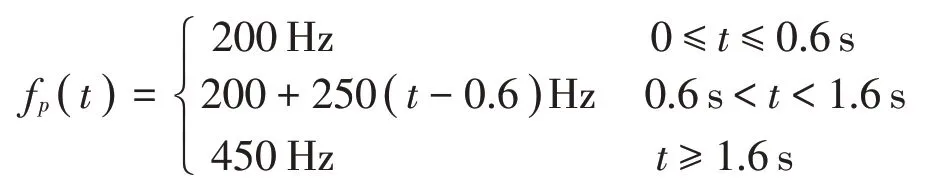
仿真过程中,对于仅有AR 模型的系统,步长取μ=0.025,μc=0.000 5;而对于新系统,步长取μ=0.006,μc=0.000 4。系统MSE 变化曲线如图5 所示。对于不同%FM,在获取较小稳态MSE 基础上,新系统收敛速度均远快于仅有AR 模型的系统,表现出优异的收敛性能。图5 显示,在初级噪声信号频率缓慢变化阶段,仅有AR 模型的系统不能快速跟踪频率的变化,而新系统却能够快速跟踪频率的变化。另一方面,对于仅有AR模型的系统,在步长因子取值相同条件下,1 %FM 对应的稳态MSE 要比5 %FM对应的稳态MSE稍大。
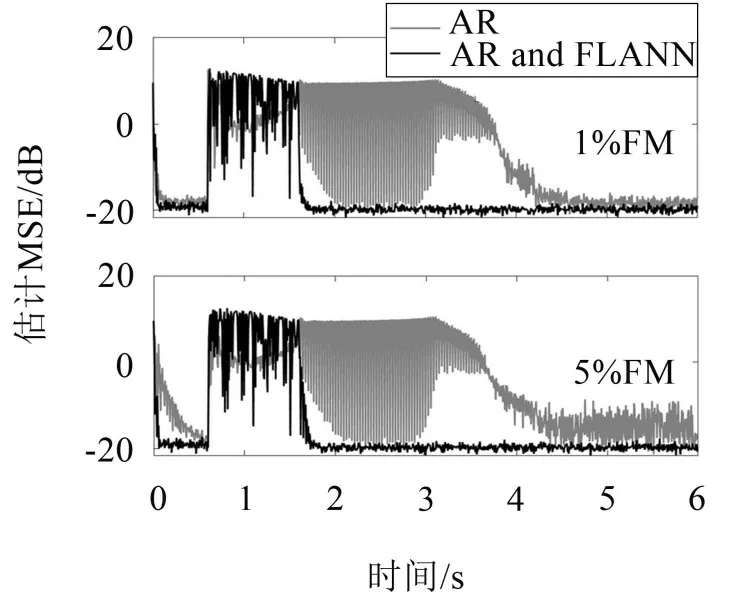
图5 频率慢速变化时系统MSE变化曲线
原因在于所选取的步长因子对于1%FM偏大,导致稳态MSE偏大。为了证实这一点,取μ=0.01,该系统至少需要15 s 才能收敛至稳态,而且稳态MSE 仅为-16.51 dB(图5 上图中为-14.74 dB)。当步长进一步取小,如取为与新系统中一致时,该系统在应对1%FM过程中,至少要超过40 s才能收敛至稳态,而且稳态 MSE 反而增大至-13.72 dB。我们知道,对于不存在FM的情形,取相对小的步长因子,虽然收敛速度减缓,但可以获得更小的稳态MSE。大量仿真与分析显示,当系统存在FM时,确保最小稳态MSE的最优步长因子与%FM的大小有很大关系[10-11],基本规律是:随着%FM 的增加,应适当增大步长因子。根据这个规律,能够准确解释在相同步长因子取值基础上,图5 下图所示稳态MSE(-18.40 dB)比图5上图中的要小。而图5所示由新系统所得稳态MSE却相当,分别为-19.88 dB和-19.86 dB。综上,针对初级噪声信号频率缓慢变化的非平稳情形,新系统在收敛性能上相较于AR模型有极大提升。整体上,新系统呈现出较好的频率跟踪性能,对%FM 波动适应性强,收敛速度快,降噪效果理想。
3.3 频率快速变化
初级噪声信号频率快速线性变化模式及其曲线如式(27)和图4所示[5]。

这里,在仅有AR模型的系统中,步长取μ=0.025,μc=0.000 5;在新系统中,步长取μ=0.007,μc=0.000 5。系统MSE 变化曲线如图6 所示。图中MSE 变化曲线显示,当初级噪声信号频率相对较快变化时,两种系统均需要更长的时间跟踪频率,收敛至稳态。同时,新系统能够在取较小步长值的条件下,仍然保持较快的收敛速度,并且稳态误差较小。
图6 频率快速变化时系统MSE变化曲线
进一步仿真显示,随着%FM 的增加,在与图5相同步长前提下,新系统仍然能够表现出极好适应性,如图7 所示。即使%FM 高达25%,新系统在应对频率慢速和快速变化时,稳态MSE 分别能够达到-19.81 dB和-19.98 dB。另一方面,随着频率通道增加,新系统在噪声抑制及FM 应对方面均有更加明显的优势,这可以从图8所示3频率通道(200 Hz、400 Hz、600 Hz)情形仿真结果明显看出。多频率通道仿真基本参数设置如表2 所示,其余参数设置与表1中的相应参数设置一致。
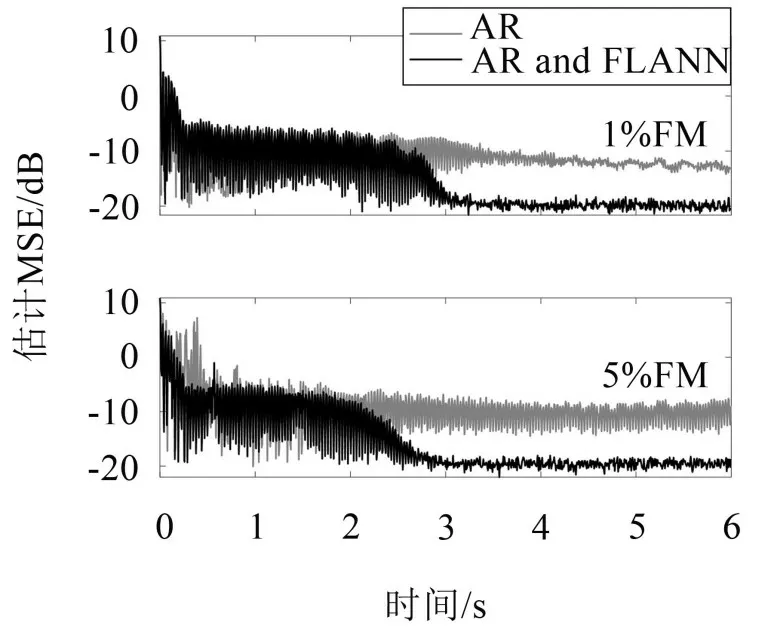
图8 多个恒定频率通道条件下系统MSE变化曲线
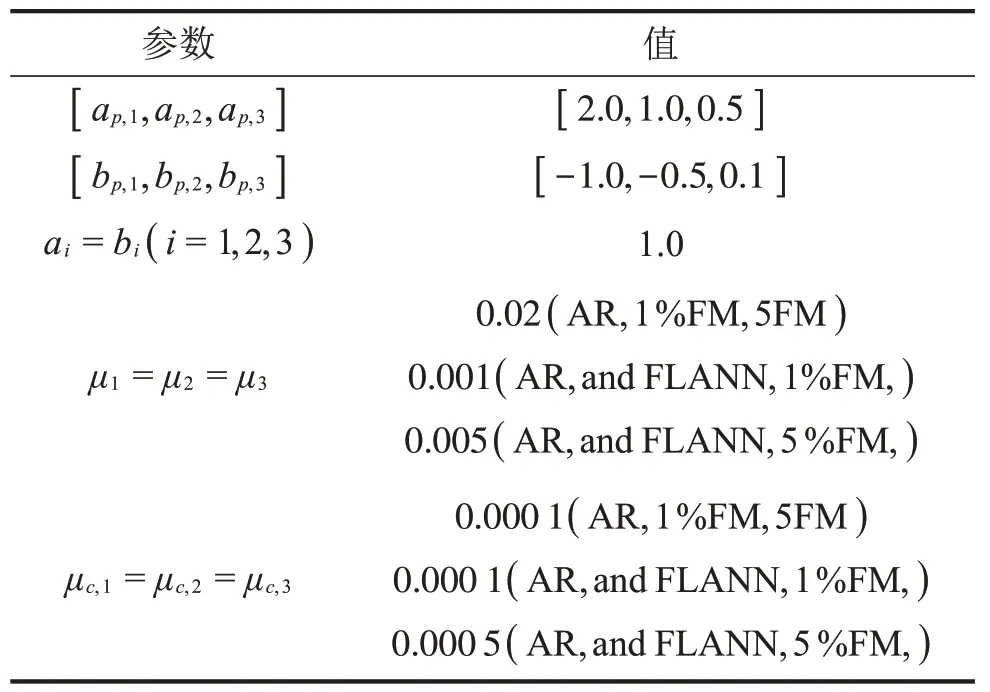
表2 多频率通道情形仿真基本参数设置
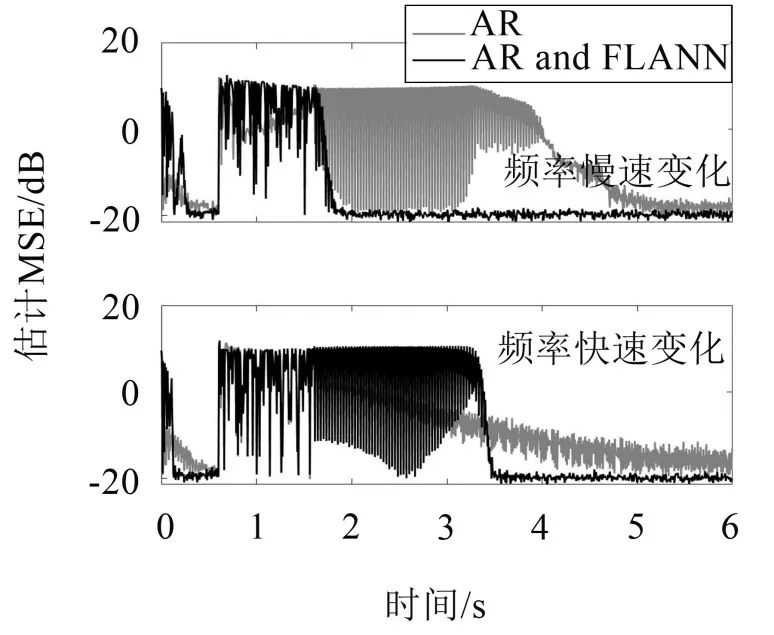
图7 25%FM时系统MSE变化曲线
最后,对FLANN 滤波器长度的取值进行讨论。在仅有AR 模型的窄带ANC 系统基础上,使用FLANN 结构会在一定程度上增加计算量。对于一个频率通道,每次迭代增加的计算量中,乘法增加了6(N-1)次,加法增加了2(N-1)次。
以图7 所示的仿真条件为例,取不同的N,得到如图9所示的仿真结果。显然,当N的取值较小时,系统收敛速度受到了限制,反之当N的取值过大时,不仅收敛速度并没有得到明显的提升,还增加了计算量。因此,取得合适的N值,在保证系统收敛速度较快的同时,并未带来过多额外的计算量。
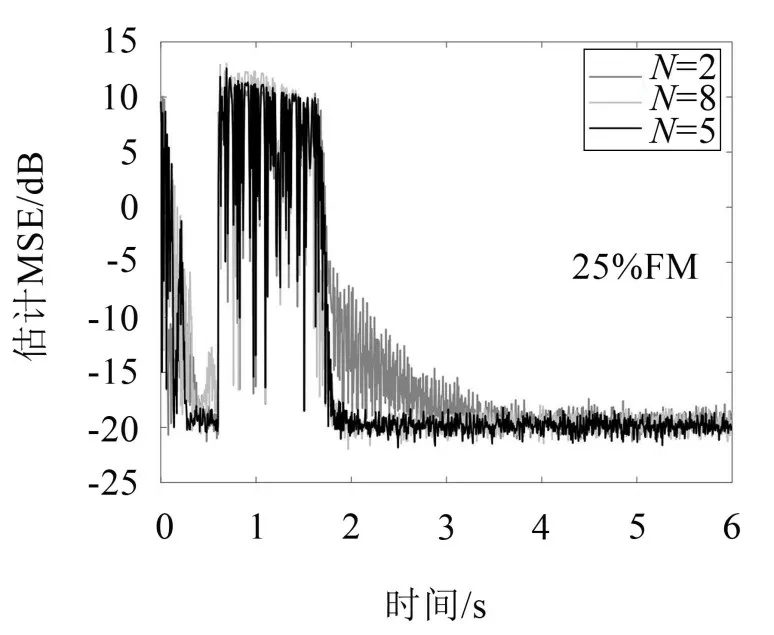
图9 不同N取值下频率慢速变化时系统MSE变化曲线
4 结语
本文主要针对非平稳FM 问题,设计了基于自适应FLANN 滤波器的窄带ANC 系统并与仅含2 阶AR模型的系统进行比较。理论和仿真结果表明,新系统在同时存在较大FM 量和频率非平稳情况下,能够有效抑制窄带噪声,验证了所设计系统在应对窄带ANC系统中FM问题的有效性。在设置的仿真条件下,其性能均优于仅含2 阶AR 模型的系统,尤其是当频率时变且存在较大FM 量时采用仅含2 阶AR模型的系统已经无法取得理想降噪效果,而新系统仍然表现出极佳的降噪性能和收敛速度。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
中国惯性技术学报(2020年2期)2020-07-24
成都信息工程大学学报(2019年2期)2019-08-28
山东冶金(2019年1期)2019-03-30
电子制作(2017年20期)2017-04-26
科技与创新(2017年3期)2017-03-17
电子制作(2017年19期)2017-02-02
电脑知识与技术(2016年22期)2016-10-31
北京航空航天大学学报(2016年12期)2016-02-27
科技与创新(2015年23期)2015-12-08
