基于元学习的变工况轴承故障诊断研究
2023-10-27 10:32吴东升贾德桥董岩松
沈阳理工大学学报 2023年6期
吴东升贾德桥董岩松
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
轴承在旋转机械中起着重要作用,由于工作条件恶劣,轴承很容易发生故障或损坏,影响机械设备的正常运行,造成巨大的经济损失甚至人员伤亡。 因此,轴承故障诊断一直是研究的热点问题[1-3],其中智能故障诊断方法尤其受到关注。传统的智能故障诊断方法包括卷积神经网络(convolutional neural networks,CNN)、支持向量机(support vector machine,SVM)等。 Chao 等[4]提出了一种多尺度级联中点残差卷积神经网络,首先引入一种新的多尺度级联结构提取原始数据中包含的多分辨率特征,然后在其每个分支中采用改进的中点残差块解决深度网络性能下降问题,增强了模型的抗噪声鲁棒性。 徐先峰等[5]利用堆栈稀疏自编码的频域深层特征学习能力对轴承故障特征进行处理,并使用泛化能力强、分类速度快的SVM 作为分类器,在轴承故障诊断中取得较好的效果。 通常,在识别故障类型之前,需要利用信号处理技术从原始振动信号中提取有效特征,但由于实际工况下运行环境复杂,振动信号不平稳、包含强噪声,提取器获取的特征可用性较差,严重影响了传统智能方法的故障诊断结果,设计一种实用的信号处理方法以有效地提取故障特征成为传统智能方法面临的挑战。
与传统智能故障诊断方法相比,深度学习方法能够自动学习有价值的特征及进行特征提取[6],可避免应用各种信号处理技术,实现端到端学习。 目前,深度学习网络已被用于轴承故障诊断,如深度自编码器、深度卷积神经网络(deep convolutional neural networks, DCNN) 等。 Zhu等[7]为实现智能轴承故障诊断提出预完全连接的DCNN,在CNN 前增加一个连接层,降低了信号的复杂性。 Lu 等[8]采用基于堆叠降噪自编码器的分层结构识别旋转机械部件的健康状态,获得了良好的效果。 Jia 等[9]提出了一种使用标准稀疏自编码器的连接模型,该模型在智能轴承故障诊断中得到了有效验证。
以上深度学习方法均假设可以获取丰富的轴承故障数据用于检测,但实际生产中轴承出现故障后需要立即更换,难以收集大量的故障样本。由于轴承故障样本较少,深度学习模型可能会出现过拟合现象,导致其性能降低,通常可采用数据增强、删除和正则化等技术解决该问题。 近年来,研究者开始利用小样本深度学习进行轴承故障诊断。 Han 等[10]开发了一个小样本加权CNN 集成模型,该模型表现出比普通CNN 更好的性能。 Li等[11]采用自适应超环检测器算法,通过小样本训练实现在线故障诊断。 Zou 等[12]提出了对抗性去噪CNN,用于有限样本的旋转机械故障检测,利用对抗机制提高了抗噪声能力,扩展了训练样本。
上述深度学习方法均未考虑小样本学习范式,而元学习(Meta-Learning)方法能够进行小样本的分类、回归及强化学习,可解决实际样本不足的问题。 因此,本文提出一种基于元学习的轴承故障诊断方法,用于变工况下轴承故障诊断。 首先对获取到的原始数据进行数据重构(data reconstruction,DR),然后进行判别空间优化(discriminant space optimization,DSO),构造判别边界损失和判别聚类损失,实现相似故障特征的聚合和不同故障类别的分离,准确提取广义特征,以增强不同类别特征的可辨性和同类别特征的识别能力,更利于元学习,从而对噪声污染严重的有限样本实现准确分类。 本文提出的故障诊断方法简称为DR-MLDSO 方法。
1 数据重构
随着深度学习的发展,包括但不限于自动编码器(auto encoder,AE)的各种数据驱动方法被用于数据重构。 AE 作为一种无监督学习模型,能够通过最小化重构误差[13]保证网络的输出接近输入,其目标即是找到一个能在输出和输入之间建立映射关系的恒等函数。 基本自动编码器AE 是一个三层神经网络,其中中间层用于捕获隐藏在原始数据中的有用特征。 自AE 产生以来,人们在不同的约束条件下开发了一些AE 的变体,主要变体是稀疏自编码器(SAE)[14]和去噪自编码器(DAE)[15]。 SAE 通过正则性设计约束每层节点的输出为0,实现数据的稀疏性表达,对于分类任务更加有效;DAE 使用服从特定分布的噪声信号混入原始数据中,生成新的输入数据,目标是重构结果尽可能与原始数据相似,使模型对噪声环境具有鲁棒性。
本文综合SAE 和DAE 的优势,提出改进稀疏降噪自编码器(improved sparse denoising autoencoder,ISDAE),采用均方误差和稀疏惩罚项作为数据重构的优化目标,两个样本之间概率分布的差异采用统计意义上的最大平均差异(maximum mean difference,MMD)来评价,以提高数据重构能力。 数据重构的优化目标JISDAE(W,b)表达式为
式中:xi(i=1,2,…,n)表示输入;yi(i=1,2,…,n)表示输出;n为样本总数;m为给定样本数;W为权重;b为偏置;hW,b(xi)为重构后样本的预测输出;为 均 方误 差 项;为惩罚项,其中β为惩罚系数,^ρj为隐层神经元的第j个激活值,s1为隐层神经元的总数,ρ为稀疏性参数,KL(ρ‖)表示相对熵,用于衡量和ρ之间的距离;MMDk(X,Y)表示两个样本集X、Y的最大平均差异。
KL(ρ‖)计算式为
MMDk(X,Y)计算式为
式中:a为源域样本数;b为目标域样本数;X={xv}av=1,Y={yw}bw=1,X、Y服从正态分布;ϕ(•)为原始特征空间到再生希伯尔特空间的非线性映射。 由于空间维数极高,无法直接得到ϕ(•),故引入具有对称正定性质的特征核来求解。 MMD的经验估计公式为
式中k表示高斯核函数。
ISDAE 的输出不仅保留了重要的特征,而且减少了隐藏在输入中的冗余信息。 ISDAE 数据重构示意图如图1 所示。

图1 ISDAE 数据重构示意图Fig.1 Schematic diagram of ISDAE data reconstruction
2 元学习
元学习通过训练学习元知识,当面对新任务时,只需要少量的样本就可以进行准确分类。 元学习可以分为三类:基于度量的元学习方法,该方法侧重于嵌入空间中特征的准确分类,如原型网络[16];基于模型的元学习方法,该方法通过设计模型的内部结构或使用另一个模型生成快速学习模型的参数来实现快速学习的目标,如记忆增强神经网络[17];基于优化的元学习方法,该方法使模型通过现有的优化算法,在有限样本条件下能够快速收敛,以获得良好的预测结果,如模型不可知元学习[18]。 本文采用基于度量的元学习方法。
学会学习是元学习的目标,元学习方法只需要少量的样本就可以学会处理新的任务。 元学习训练过程通常使用N-wayK-shots 将数据集划分为几个任务,其中每个任务有N类样本,有K个标记样本,称为支持集,一个未标记样本,称为查询集。 利用学习到的元知识,模型可以在少量样本的帮助下学习对新任务进行分类。
3 判别空间优化
在故障样本非常有限和背景噪声很大的情况下,传统的小样本学习方法表现出的性能不佳。这是因为通用模型只能提取非广义特征,无法学习有效的元知识。 因此,本文提出判别空间优化策略以进一步区分不同类型的故障特征,为小样本轴承故障诊断获取更广义的特征。 判别空间优化过程如图2 所示。 判别空间优化由判别边界损失和判别聚类损失组成:采用判别边界损失放大类间距离,实现不同类型故障特征之间的分离,形成良好的判别边界;采用判别聚类损失压缩距离,实现同类型故障特征之间的聚类,促进故障特征的聚合效果。 由此在度量空间中对网络提取的故障特征进行优化判别,以利于元学习。

图2 判别空间优化Fig.2 Discriminate space optimization
3.1 判别边界损失
本文在三元损失[19]的基础上提出判别边界损失。 从训练集中随机选择一个样本作为锚点,随机选择与锚点相同类别的样本并将其设置为正样本,其他不同类别的样本则被标记为负样本。三元损失主要作用是压紧锚点与正样本之间的距离,并将锚点与负样本之间的距离扩大到理想距离,三元损失Ltriplet计算式为
式中:Nu为基数;f(•)为特征提取器的映射函数;为锚点的第s个样本;xps为正点的第s个样本;为负点的第s个样本;α是正负样本之间的强制差值。
为避免不同类别的故障特征在度量空间中重叠,判别边界损失选取训练集的所有数据作为优化对象,即三元损失中的锚点;选择类的中心点作为优化目标,将其视为三元损失中的正数,确定离该类最近的另一类的中心点作为排除目标,将其作为三元损失中的负数。 选择损失为正数的样本,确保其边界明确,优化三元组选择条件。 本文提出的判别边界损失Lborder计算式为
式中:fϕ(•)为特征提取器的映射函数;Km为类的总数;Nm为每个类的样本数量;xpt为p类的第t个样本点;Cp为p类的中心点;Cnp表示与p类最近的类的中心点;φ为Cp与Cnp之间的强制余量。
3.2 判别聚类损失
上述判别边界损失既能疏离类间距离、解决边界重叠问题,又能优化类内距离,但其不能减少绝对类内距离。 因此,本文提出一种减少绝对类内距离的聚类损失方法,以更好地提取相似样本中具有共性的广义特征,通过减少类内方差达到聚合效果。 中心损失一般应用于样本数量足够的条件下,在样本有限的情况下,采用中心损失无法取得良好的性能;在传统应用中,只使用小批次数据计算聚类中心,在故障诊断的元学习中表现不佳。 为提高有限样本的类内聚类效果,采用支持集的中心点作为样本中心点,避免通过中心损失选取的中心点与支持集的中心点相差而产生负聚集效应;为匹配本文方法的训练过程,在每个任务中重新计算每个类的中心点。 判别聚类损失Lclustering表示每个样本点到该类对应中心点的平均距离,其计算式为
3.3 总体判别空间损失
基于上述判别边界损失和判别聚类损失,得到判别空间优化损失L为
式中η为判别聚类损失的权重。
判别空间优化损失旨在通过优化不同类别特征的边界来分离不同类别的故障特征,并通过优化度量空间内的聚类效果获得更广义的特征。 因此,通过优化判别空间损失,可有效地提取广义特征,更好地区分不同类别的特征,获得更好的容错能力,在小样本、大噪声和可变工况下均可获得良好的性能。
4 故障诊断流程
本文提出的基于小样本元学习的变工况滚动轴承故障诊断流程如图3 所示,图中FC 表示全连接。 整个故障诊断过程可分为三部分:数据预处理、离线建模、在线诊断。 具体诊断步骤如下。
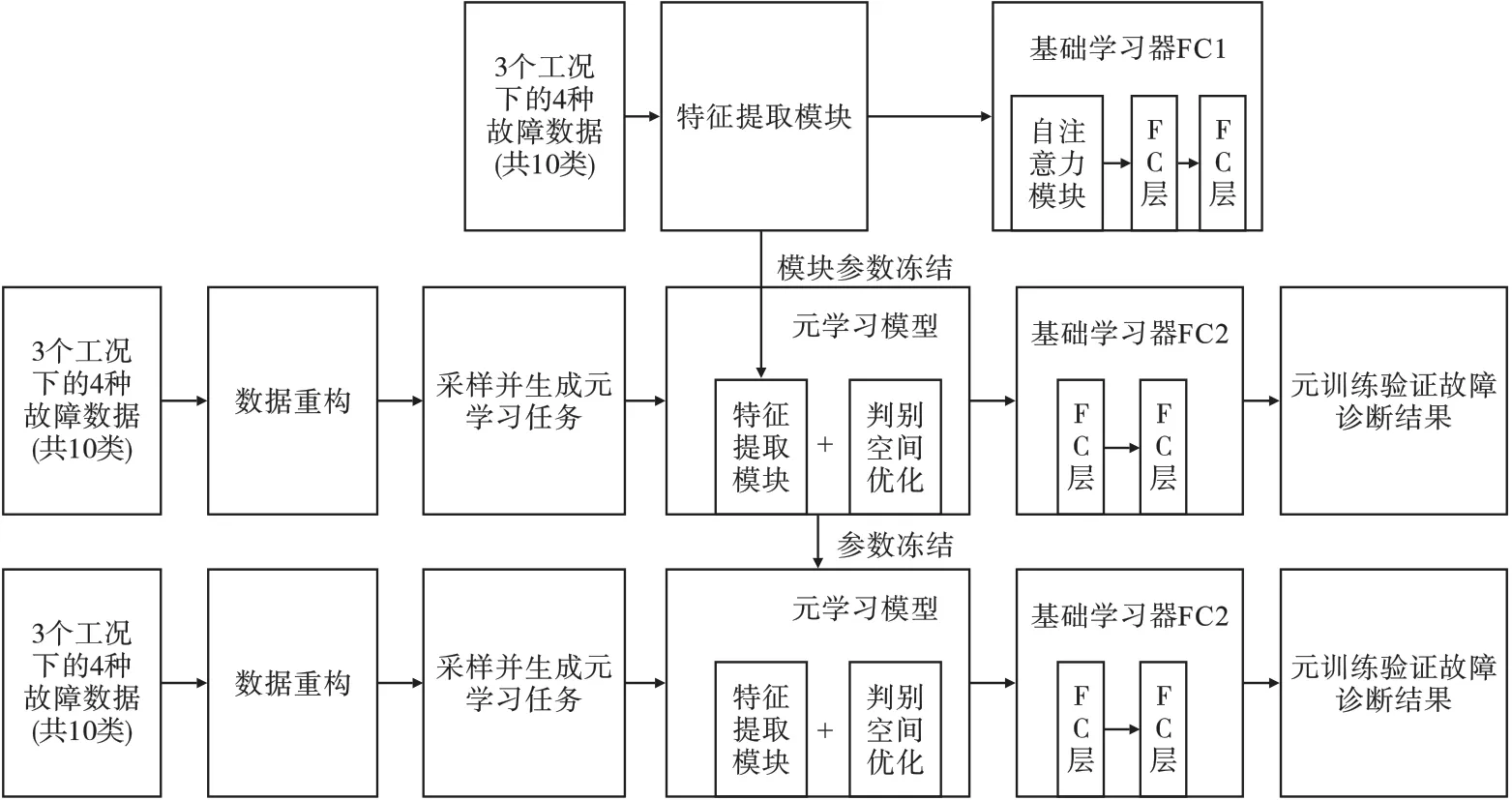
图3 变工况滚动轴承故障诊断流程图Fig.3 Flow chart of rolling bearing fault diagnosis in variable working conditions
1)通过测量系统从实验装置中收集数据,将振动数据导入ISDAE,输出既保留了显著特征,又减少了隐藏在输入中的冗余信息。
2)在源域中训练特征提取器进行判别空间优化,然后按照元学习范式构建训练和测试数据集。
3)通过在目标域的新任务支持集中学习少量样本,进一步优化判别空间,然后将查询集输入训练良好的模型,完成故障诊断。
5 实验验证
为验证本文方法的有效性,采用美国凯斯西储大学(CWRU)的开放轴承数据库样本进行实验。 实验中超参数γ设置为0.000 05,学习率固定为0.001,所有的方法均选择优化器Adam。 为减少误差,每个实验均进行10 次重复测试,去掉其中的最小值和最大值,取剩余8 个测试数据的平均值作为最终评价结果。 本文实验所用的环境配置为:CPU,Intel Core i7-8700;GPU,INVIDIA GTX 1080 Ti;深度学习框架为Pytorch。
5.1 变工况轴承故障诊断实验
测试轴承(型号为6205-2RS JEM SKF)安装在电机的驱动端,采用加速度传感器在不同负载和不同速度下采集样本数据,采样频率设置为12 kHz。 每种工况包含正常、外衬圈故障、内衬圈故障、滚子故障共4 种不同健康状态的轴承信号,每种类型的故障包含3 种不同程度的损伤,损伤直径分别为0.007、0.014 和0.021 英寸,故本文所使用的数据集包含了10 种类型的轴承故障。 分别以转速1 797、1 772、1 750 和1 730 r/min 采集数据,对应的数据集分别命名为A、B、C 和D 数据集。 本文将数据集随机划分为元训练数据集、元验证数据集和元测试数据集。 每个子集随机抽取5 个类别,每个类别随机抽取5 个样本进行5-way 5-shot 训练,随机抽取一个样本进行5-way 1-shot 训练,为验证模型在小样本条件下的有效性,限制训练集中的样本数量。 为验证本文提出DRMLDSO 方法的优越性,与其他小样本故障诊断方法进行对比,包括深度适应网络(deep adaptation network,DAN)、领域适应网络(domain adaptive neural network,DANN)、元迁移学习(meta-transfer learning,MTL)和不可知元学习(model-agnostic meta-learning,MAML),变工况诊断结果如表1和表2 所示。

表1 变工况诊断结果(5-way 1-shot)Table 1 Variable working conditions diagnosis results(5-way 1-shot)

表2 变工况诊断结果(5-way 5-shot)Table 2 Variable working conditions diagnosis results(5-way 5-shot)
为验证模型的抗噪声能力,每类抽取20 个样本进行特征提取和判别空间优化训练,其余样本用于测试,并在每个测试样本中添加了额外的高斯白噪声。 实验中信噪比分别设置为0、-1、-2、-3、-4、 -5 dB,本文提出的方法与其他方法在不同信噪比下的诊断准确度对比如表3 所示。

表3 不同信噪比下的诊断准确度对比Table 3 Accuracy at different signal-to-noise ratios
5.2 实验结果分析
由表1 和表2 可知,本文提出的DR-MLDSO模型在5-way 1-shot 和5-way 5-shot 共12 个工况下的诊断均获得了较高的准确度。 5-way 1-shot下的平均准确度为94.87%,5-way 5-shot 下的平均准确度为97.37%,均远高于其他四个模型,且5-shot 的准确度高于1-shot。 这是因为5-shot 包含的故障信息比1-shot 更为全面,增强了模型的泛化能力。 本文模型能够提取更多更好的特征用于诊断,降低了过拟合的程度。
由表3 可见,在不同加噪条件下,与其他四个模型相比,本文提出的DR-MLDSO 模型诊断准确度均最高,说明本文模型具有较好的抗噪性。 这是由于其对判别空间进行了优化,将相似的故障特征更紧密地聚集在一起,并将不同类别的特征分开,从而获得了高度容错的判别空间,当故障特征被重噪声污染时,不会导致错误分类。
图4 为本文方法分别在数据集加噪和不加噪情况下的t-SNE 可视化图。 由图4 可知,本文方法聚类效果良好,且在噪声下也能较好完成故障分类任务。
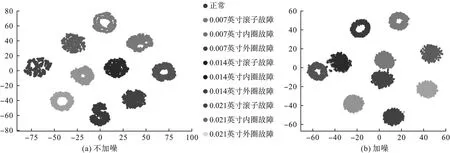
图4 t-SNE 可视化图Fig.4 t-SNE visualization
6 结论
提出了一种由数据重构和元学习判别空间优化相结合的滚动轴承故障诊断方法DR-MLDSO,并在CWRU 实验平台上对该方法的性能进行了评估,得到结论如下。
1)DR-MLDSO 的数据重构降低了噪声的影响,较好实现了故障分类。
2)通过判别空间优化,在训练过程中学习了更多有用的元知识,在跨域故障诊断中也表现出了良好的性能。
3)DR-MLDSO 只需要少量样本就可以学习区分不同故障的特征,在噪声环境下也有较好表现,具有较好的鲁棒性。
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
数学小灵通·3-4年级(2021年5期)2021-07-16
今日农业(2019年15期)2019-01-03
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
广西民族大学学报(自然科学版)(2015年3期)2015-12-07
读者·校园版(2015年19期)2015-05-14
振动、测试与诊断(2014年5期)2014-03-01