基于模糊控制的无人车编队重构方法
2023-10-27 10:32滢石宜金龚天昊
沈阳理工大学学报 2023年6期
张 滢石宜金龚天昊
(1.丽江文化旅游学院a.信息学院, b.科研处,云南 丽江 674199;2.沈阳理工大学 自动化与电气工程学院,沈阳 110159)
随着机器人技术、通信技术和人机交互系统的发展,多无人车系统(MUVs)已成为机器人群组协作的重要分支。 MUVs 一般是指由多辆无人车组成的,能够以合作的方式与人及其他无人车之间互动的一组无人车队[1]。 与单一无人车相比,MUVs 具有的优势包括更快地完成多项任务、更强的系统容错能力、更好的整体灵活性,越来越多地被用于执行侦察监视、警戒巡逻、定位制导、高危作业、特种作战、物资运输等,特别是在军事领域展现出广阔的应用前景[2]。
为方便管理,提高系统整体运行效率及整体实用性,MUVs 需要进行无人车编队。 通常编队问题可以划分为编队队形形成、编队追踪、编队重构和编队任务分配。
在实际应用中,MUVs 常常需要提前规划好车队的整体行进路线,在移动过程中需要保持一个固定的队形。 编队追踪问题就是研究使无人车队在移动过程中保持稳定队形的编队控制方法[3]。 MUVs 的运动环境复杂或行进路线中车道出现一定的障碍,会导致无人车队前进过程中发生阵型破裂甚至车间碰撞的危险,需要MUVs 具备一定的队形变换能力应对可能出现的编队重构问题。
编队追踪是重构的前提,而编队重构是追踪的延伸。 现有的无人车编队控制方法,如虚拟结构法、基于图论法、领航跟随者法、基于行为法等,都具有一定的编队重构能力。
Lee 等[4]设计了一种分散的基于行为的编队控制算法,仅利用机器人与障碍物之间以及相邻机器人之间的相对位置内构完成编队任务。 Lin等[5]基于模型预测控制(MPC)和自适应终端滑模控制(ATSMC),提出了一种轮式移动机器人(WMRs)的混合编队控制,其中MPC 用于确保编队的稳定性,ATSMC 则用于补偿外部干扰。 Li等[6]提出了一个分层分布的有限时间估计器,允许每一层的机器人根据其上一层的机器人信息获得其目标位置和速度,并在指令中利用一种基于模型的控制方法实现多层编队。 Sarrafan 等[7]提出了一种基于领航跟随者策略的非自主轮式移动机器人(WMRs)的编队跟踪控制算法,使用反动力学控制技术,结合高增益观测器和径向基函数(RBF)网络实现预期的编队。 王睿烽[8]提出了动态虚拟领航跟随的队形控制方法,并基于图论将复杂环境下的多车编队问题的研究转化为多车分级跟随问题的研究。 王晓森等[9]研究了无人车编队控制问题,其中无人车领导者具有未知线速度、角速度和未知上界等,通过变换将无人车编队控制问题转化为无人车一致性问题。 之后,通过建立时变反馈控制方法,解决了无人车一致性控制问题,进而实现了无人车编队控制。 周思全等[10]针对无人机- 无人车异构系统引入代数图论概念,建立异构集群系统的协同控制模型,并对各无人机-无人车设计了具有分层架构的分布式时变输出编队控制器。 李海婷等[11]提出一种基于双曲正切型约束函数的预设性能模糊滑模编队控制算法,以实现多机器人以任意队形高精度稳定的编队。 王瑜瑜等[12]结合图论及矩阵理论研究并设计了一种针对水陆两栖异构多机器人系统编队控制的一致性自适应包含控制方式。
上述几种编队控制方法编队重构能力在于通过改变车辆位置之间的几何关系,将车队从初始队形转变为某种确定的几何形状。 但是,传统的编队控制器是以保持稳定的编队跟踪为主要目标而设计的,专门解决车队编队变化的较少,且上述方法对编队队形变换的能力有限。 队形的变换通常需要人为事先设定固定的变换,不一定适用不同复杂环境下的路况。 模糊控制具有很强的自适应能力和优秀的控制效果,为提高MUVs 在行进过程中对周围环境的适应能力,本文在现有无人车编队控制方法的基础上引入模糊控制,提出一种新的无人车编队重构方法,提高MUVs 的稳定性和安全性。
1 基于领航跟随者法的无人车编队
1.1 领航跟随者法下的车队模型
领航跟随者法的分布式控制相比于其他编队控制方法更加灵活,更容易实现后续几何关系上的队形变化。 该方法下车辆之间的通信集中在领导者和跟随者之间,领导者起决策作用,方便后续在编队重构问题上对领航者的决策层进行设计。图1 所示为两个三轮移动机器人的编队控制问题,表示了车队模型中领导者和跟随者之间的几何关系。
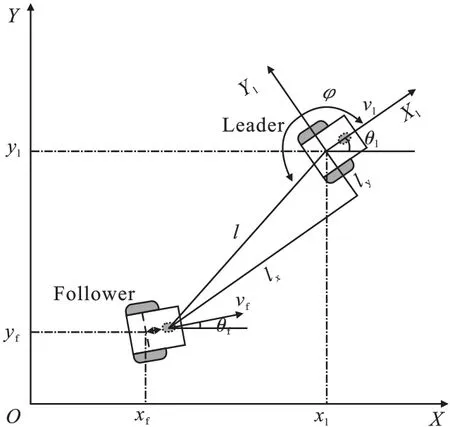
图1 领航跟随者法下的车队模型Fig.1 Fleet model under the pilot-follower method
图1 中,X-Y坐标系为世界坐标系,(xl,yl)和(xf,yf)分别代表该坐标系下领航者和跟随者的位置,vl和vf代表各自的线速度,θl和θf分别代表两者的前进方向角,d代表轮轴和导轮之间的距离,l代表领航者轮轴的中点和跟随者导轮之间的距离。 建立坐标系Xl-Yl,以领航者轮轴的中点为坐标原点,领航者的车辆前进方向为X轴方向,Y轴方向与前进方向垂直。lx和ly代表跟随者到领航者在Xl、Yl方向的相对距离,φ代表领航者和跟随者之间的相对角度。
如果(l,φ)确定,只需给定领航者的位置信息,跟随者即可以固定的角度和距离跟随领航者。因此,本文假设领航者和跟随者之间的期望相对距离和相对角度为(l′,φ′),只要满足条件l→l′,φ→φ′,两者在行进过程中可保持固定队形。 为避免编队控制器产生奇点,需在直角坐标系中进行车辆建模和控制器设计[13]。 根据图1 中的几何关系,经推导可得领航跟随者系统的运动学模型为
式中:(vf,ωf)是控制器的输出;(vl,ωl)通常是以常数或时变函数的形式给出。
1.2 基于领航跟随者法的编队控制器
如果希望在跟随者和领航者之间保持固定的队形共同运动,需要满足条件lx→lx′,ly→ly′,φ→φ′。 由于无人车电机具有饱和性,v1和wl是有界的,其一阶导数也是有界的,结合系统的运动学模型,设计MUVs 的编队控制器如下。
无人车队在运动过程中保持固定的几何结构,预期值l′和φ′是常数,此处设l′•=0,φ′•=0,假设误差ex=l′x-lx,ey=l′y-ly,则系统的误差模型表示为
设g=[g1g2],其中
将式(3)、式(4)代入式(2),得
设
式中:z为状态变量;u为输出变量;A为系统矩阵;B为输出矩阵。 则式(5)可表示为
由于det(B)≠0,可以对式(10)进行输入-输出线性化。 设K=[k1k2]T>0,其中k1和k2是控制器的可调比例系数。 -Kz=Az+Bu+g,由式(7)得
由此,得最终的控制律为
针对图1 的情况,对于任何给定的领航者路径,通过给出的控制律式(12)、式(13),可以使跟随者和领航者之间保持相对距离和相对角度进行移动,且整个系统是稳定的。 对此,文献[14]中给出了证明。
2 模糊控制下的编队重构
2.1 用于编队重构的模糊控制系统分析
由上述分析可知,只需调整l′x和l′y即可改变无人车队的整体队形结构。
以图2 的MUVs 为例查看车队重构前后的变化。
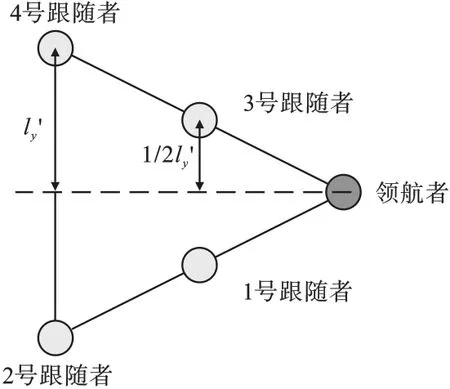
图2 无人车队的初始队形Fig.2 The initial formation of the unmanned convoy
由图2 可见,整个无人车队由5 辆相同的无人车构成,其中头车为领航者,其余四辆为跟随者,初始队形结构按图中所示的方式进行排列。出于安全性考虑,在车队移动过程中随意改变前进方向上的车间距是存在风险的。 车道环境与无人车队之间最相关的因素是车队整体宽度,是由与前进方向垂直的车间距决定的。
模糊控制系统的原理框图如图3 所示。

图3 模糊控制系统原理框图Fig.3 Schematic diagram of fuzzy control system
在MUVs 按照原定路线在车道上前进时,车道的宽度决定了无人车队是否可以保持当前队形:当车道宽度足够时,无人车队保持初始队形前进;当车道开始收窄,无人车队可以适当收缩队形以保持安全通行;当车道变宽时,车道空间足够,为了保证车队安全行驶,车队宽度可以适当放大,缓解之前收紧车队带来的风险。 由于车队移动过程中对车道宽度的检测不一定精准,同时车队内部的车间距也不需要调整到某一精确的固定值,所以采用模糊控制算法可以取得更好的效果。 通过模糊算法规则对车道到无人车队的距离和该距离的变化率进行分析,据此对无人车队的车宽进行调节,实现MUVs 对道路环境的自适应编队重构。
2.2 模糊控制器设计
图4 为一种典型的非固定宽度的车道。

图4 非固定道宽的车道环境1Fig.4 Non-fixed lane width environment 1
考虑图4 所示的车道环境,MUVs 按照图2的方式组成初始队形,设无人车队初始队形的车队宽度为4 m。 受车间通信的影响和安全行驶的要求,无人车队的宽度不能无限缩小和放大,对于图4 所示的道路环境,车队宽度的限制范围为1 ~6 m,车道宽度在4 ~8 m 的范围内变化,所以车道到无人车队距离的变化范围为0 ~7 m,该距离的变化率范围大致在[ -1.1]。
据此,车道距离车队大于3 m 时可视为对车队没有明显影响,设车道到无人车队距离D的模糊论域为[0,3],将其模糊化为{很近,较近,适中,较远,很远}5 个等级,采用符号表示为{HJ,JJ,SZ,JY,HY}。 取常用的高斯隶属函数gaussmf表示,则在模糊论域中车道到无人车队距离关于模糊子集的隶属度如图5 所示。
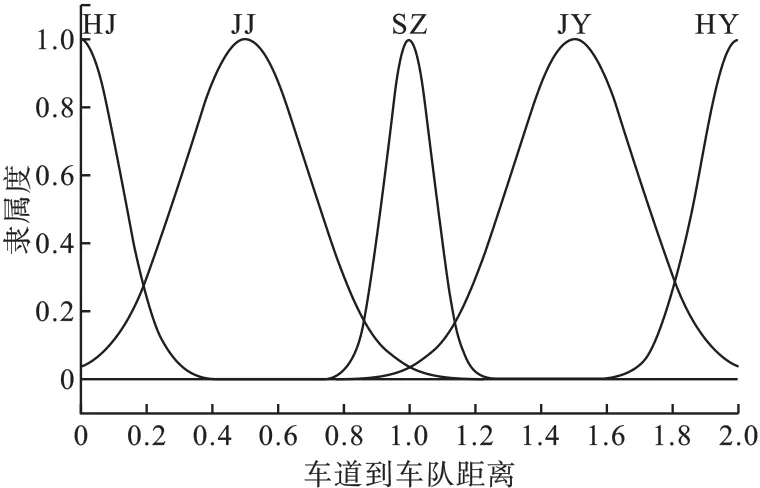
图5 车道到车队距离的隶属度函数Fig.5 Membership function of lane-to-fleet distance
同样,该距离的变化率DC的模糊论域为[ -1.1],模糊化后分为{负快,负慢,零,正慢,正快}5 个等级,采用符号表示为{NK,NM,ZO,PM,PK}。 取常用的高斯隶属函数gaussmf 表示,则在模糊论域中车道到无人车队距离的变化率关于模糊子集的隶属度如图6 所示
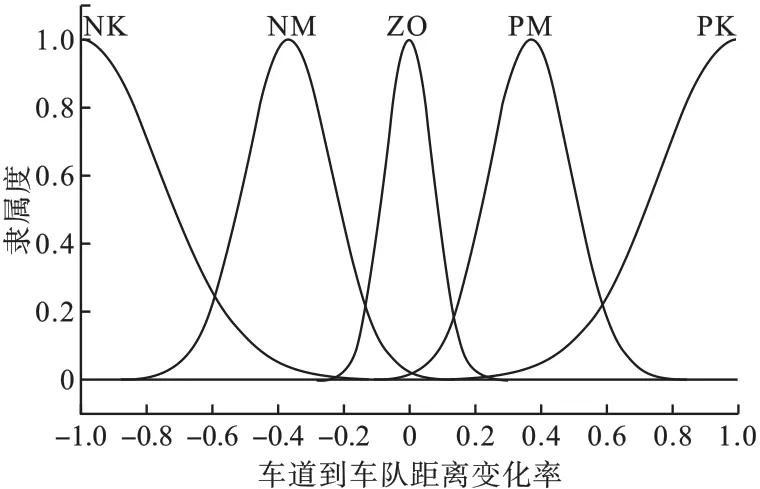
图6 车道到车队距离变化率的隶属度函数Fig.6 Membership function of lane-to-fleet distance change rate
模糊控制的输出为车队宽度,此处选择最外侧跟随者车辆ly′的变化值作为实际的输出。 由于车队宽度限制为1 ~6 m,所以ly′的变化范围为-2.5 ~2.5 m,其模糊论域同样为[ -2.5,2.5],模糊化后分为{负大,负中,负小,零,正小,正中,正大},符号表示为{NB,NM,NS,ZO,PS,PM,PB}。 取常用的高斯隶属函数gaussmf 表示,则在最外侧跟随者车辆ly′的变化值关于模糊子集的隶属度如图7 所示。

图7 ly′的变化值的隶属度函数Fig.7 Membership function of the variation of ly′
通过对车道环境分析,并根据实际经验,建立模糊控制规则如表1 所示。
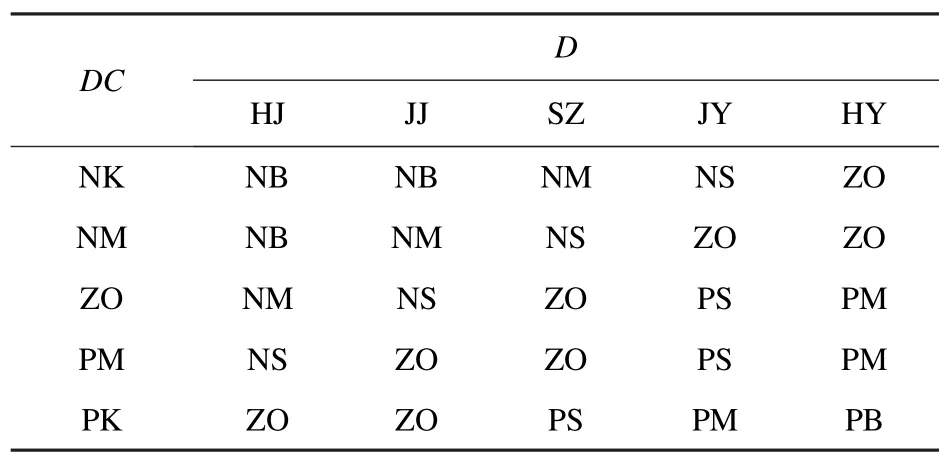
表1 模糊控制规则Table 1 Fuzzy control rule
引入模糊控制系统后,MUVs 检测到的车道到无人车队距离与变化率和外侧跟随者ly′的变化在模糊子集上的隶属度由上述的隶属度函数决定。MUVs 检测到车道宽度发生变化后,将车道到车队的距离及其变化率进行模糊化处理,再凭借模糊控制规则推理出ly′的变化值,并据此重构无人车队队形。 利用Mamdani 模糊推理算法和质心法解模糊后,ly′变化的模糊推理结果如图8 所示。

图8 模糊控制器的模糊推理结果Fig.8 Fuzzy algorithm results of fuzzy controller
3 实验与分析
为充分展现引入模糊控制后,MUVs 对道路边界变化的自适应能力,本文选择在图4 和图9两种不同车道环境下进行实验。

图9 非固定道宽的车道环境2Fig.9 Non-fixed lane width environment 2
图10 ~12 给出了在引入模糊控制后MUVs在图4 所示的车道环境下,按照图2 方式进行编队的重构结果。 图13 ~15 则是在图9 车道环境下的编队重构结果。

图10 车道环境1 初始阶段时的无人车队及其行进轨迹Fig.10 Unmanned fleet and its track at the initial stage of lane environment 1

图11 车道环境1 车道变窄时的无人车队及其行进轨迹Fig.11 Unmanned fleet and its track of lane environment 1 when the lane is narrowed
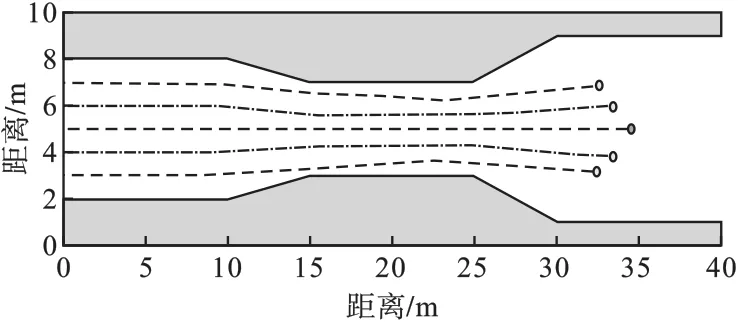
图12 车道环境1 车道加宽时的无人车队及其行进轨迹Fig.12 Unmanned fleet and its track of lane environment 1 when the lane is widened

图14 车道环境2 车道加宽时的无人车队及其行进轨迹Fig.14 Unmanned fleet and its track of lane environment 2 when the lane is widened
从上述实验结果中可以看出,在图4 环境中,开始阶段的车道宽度足够,无人车队在编队控制器下可以稳定保持初始队形通过;当MUVs 检测到车道开始缩窄时,为安全通过该路段,无人车队在模糊控制器的作用下适当收紧车队宽度;在通过狭窄车道后,车道宽度变得更加宽阔,此时MUVs 相应地加宽车队宽度。 在图9 环境中,车道加宽使得车队的队形适当放大;车道迅速缩窄时,车队以更快的速度收紧保证车队安全通行。 通过在两种不同车道环境下的实验结果可以看出:引入模糊控制后,无人车队对复杂车道环境的自适应能力得到了显著提升。
以图4 所示的车道环境为例,图16 和图17给出了运动过程中各辆跟随者和领航者之间lx和ly的变化。
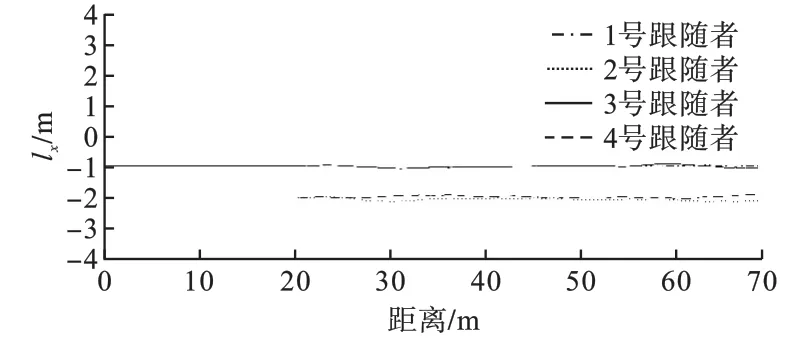
图16 各跟随者车辆行进过程中的lx 变化Fig.16 lx change of each follower during the movement of the vehicle
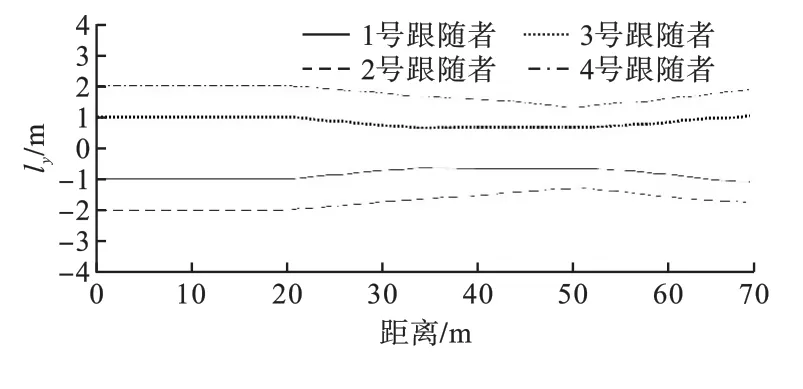
图17 各跟随者车辆行进过程中的ly 变化Fig.17 ly change of each follower during the movement of the vehicle
从图16 ~17 中可知,当MUVs 检测到车道宽度发生变化时,各辆跟随者的ly在模糊控制器的影响下开始随着车道的变化进行相应变化。 出于无人车队安全行驶的考虑,车辆之间的车间距不能低于1 m,所以当靠近内侧的跟随者车辆达到安全距离时便停止减少ly,而外侧的跟随者车辆继续变化。 由于lx和ly之间关系紧密,ly的变化使得lx也发生一定的微小波动,但并未影响无人车队的整体稳定。
4 结论
为使MUVs 具备一定的车道环境自适应能力,本文提出一种基于模糊控制的无人车编队重构方法。 通过将系统检测到的车道到车队距离及其变化率与无人车队的纵向预期距离ly′的变化值之间建立联系,设计了用于编队重构的模糊控制器。 实验结果表明:MUVs 通过模糊控制算法的智能调节后,可以适应较为复杂的车道环境变化。通过对无人车队的ly′的调整,车队可以灵活地对自身结构进行自适应调整,提高了MUVs 运动过程中的整体稳定性和安全性。
猜你喜欢
智慧少年(2022年8期)2022-05-30
今日农业(2021年5期)2021-05-22
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
智能城市(2018年8期)2018-07-06
中国广播(2017年9期)2017-09-30
纺织科学研究(2017年8期)2017-09-05
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
诗潮(2017年5期)2017-06-01
西北工业大学学报(2015年1期)2016-01-19