
An improved nonlinear onboard adaptive model for aero-engine performance control
2023-11-10 02:18QianCHENHanlinSHENGTianhongZHANG
CHINESE JOURNAL OF AERONAUTICS 2023年10期
Qian CHEN, Hanlin SHENG, Tianhong ZHANG
Jiangsu Province Key Laboratory of Aerospace Power System, College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
KEYWORDS
Abstract The onboard adaptive model can achieve the online real-time estimation of performance parameters that are difficult to measure in a real aero-engine, which is the key to realizing modelbased performance control.It must possess satisfactory numerical stability and estimation accuracy.However,the positive definiteness of the state covariance matrix may be destroyed in filter estimation because of the existence of some uncertain factors, such as the accumulated measurement error,noise,and disturbance in the strongly nonlinear engine system,inevitably causing divergence of estimates of Cholesky decomposition-based Spherical Unscented Kalman Filter (SUKF).Therefore,this paper proposes an improved SUKF algorithm(iSUKF)and applies it to the performance degradation estimation of the engine.Compared to SUKF, the iSUKF mainly replaces the Cholesky decomposition with the Singular Value Decomposition(SVD),which is numerically stable without any strict requirement for the state covariance matrix.Meanwhile,a correction factor is designed to assess the measurement deviation between the real engine and the nonlinear onboard model to correct the state covariance matrix,thus maintaining better numerical stability of parameters estimated by the filter.Then, an offline correction strategy is also proposed to eliminate the influence of the degradation of unestimated health parameters or the filter’s inadequate estimation of the coupled health parameters.This action effectively promotes the onboard adaptive model’s estimation accuracy concerning the degradation of the engine’real health parameters and its performance parameters.Finally,the simulation results show that the iSUKF can maintain the numerical stability of the filter’s estimation of health parameters.Compared with the existing methods,the offline correction strategy improves the estimation accuracy of the iSUKF-based nonlinear onboard adaptive model for the performance parameters of the real engine by more than 50%.The proposed method will provide feasible technical support for model-based aero-engine performance control.
1.Introduction
Model-based control,1,2which allows full exploitation of the engine’s potential, is considered to be the most promising advanced control technology to make an aero-engine operate with ultra-high efficiency, ultra-high stability, and ultra-low fuel consumption.3,4Being a premise to realize this technology,the onboard adaptive model mainly provides the control system with real-time feedback on the real performance parameters(such as net thrust(Fnet),surge margin of the high-pressure compressor(smHPC),combustor exit total temperature(Tt40),and low-pressure turbine exit total temperature (Tt50)) which are unmeasurable or difficult to measure.Therefore, in-depth research on the onboard adaptive model should be carried out better to control the aero-engine performance parameters precisely.
Currently, the filter estimators applied to aero-engine onboard adaptive models mainly include Linear Kalman Filter(LKF), Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), Particle Filter (PF), Cubature Kalman Filter(CKF), and their combinations or variants.Among them,EKF, UKF, PF, and CKF, belonging to the nonlinear Gaussian filtering,5are more studied in the nonlinear engine system.Fig.1 shows the development process of the Kalman filterbased onboard adaptive model.For example, in 1989, Luppold et al.6first developed a Self-Turning Onboard Realtime engine Model(STORM)based on the linear Kalman filter estimation algorithm.Moreover, they proposed using LKF to estimate the performance degradation of the engine, whereby the onboard model is modified to track the engine’s real operating conditions.Since then, the onboard adaptive model has been widely used.Later, Volponi et al.7,8improved the STORM by adding a neural network correction module to form an enhanced Self Tuning Onboard Real-time engine Model (eSTORM), and took the P&W F117 engine of the C-17 military transport plane as the verification platform.Yuan et al.9used the performance degradation parameter as an augmented state variable to design an LKF-based aeroengine real-time adaptive model to adapt the onboard model to the real engine operating state.Lu et al.10proposed a hybrid Kalman filter-based aero-engine adaptive model which could always match the actual engine to meet the practical application within the full flight envelope and under the circumstances of different operating conditions and serious performance degradation.However, when an LKF is adopted, a full envelop linear state-space model that reflects the dynamic changes of the engine at any operating point must be calculated.In order to solve this problem, in view that linear modeling of the engine cannot meet the accuracy requirements throughout the full life cycle,Gu et al.11proposed an adaptive fitting modeling-based aero-engine health parameter estimation method.According to the comparison and verification,compared with the general improved fitting method, the Kalman filter based on the proposed modeling method can greatly improve the estimation accuracy of health parameters and achieve better real-time performance.Pang et al.12proposed a real-time online solving method for linear state-space models and established an improved incremental LKF-based hybrid onboard adaptive model for engine parameter prediction.However, the state-space model obtained through the calculation of the Jacobian matrix is not precise.

Fig.1 Development process of Kalman filter-based onboard adaptive model.
As the aero-engine is a highly complex and strongly nonlinear system,obtaining a full envelop high-precision linear statespace model is quite challenging.Therefore, Brunell13and Le´onard14, et al.successfully established an onboard adaptive model with EKF to determine the engine’s health condition and performance level.Kobayashi et al.15proposed a Constant Gain Extended Kalman Filter(CGEKF)-based onboard adaptive model for the in-flight estimation of non-measurable performance parameters of aircraft engines, which can accurately estimate the performance of the engine at off-nominal conditions.Palmer et al.16used the Numerical Propulsion System Simulation (NPSS) tool to carry out a digital simulation of the onboard adaptive model for a twin-rotor turbojet engine,and the real thrust of the engine was estimated accurately by the system.Lu et al.17,18designed Recursive Buffer EKF(RBEKF), Recursive Buffer UKF (RBUKF), and hybrid EKF algorithms to solve the packet dropouts of measurement data.The simulation results showed that they are effective and can accurately estimate the degradation or fault of engine components.However, the Cons of EKF is that it has a Jacobian matrix calculation process, which is easy to cause numerical divergence.Fortunately, UKF, an interesting approach for the state estimation of highly nonlinear systems19–21, can handle it.Yang and Ai22proposed an improved Strong Tracking UKF (STUKF) algorithm to establish an onboard adaptive model.The simulation results showed that this method could significantly improve the estimation accuracy of the onboard adaptive model in the dynamic process while satisfying the requirement of real-time and robustness.Zhou et al.23,24designed a nonlinear onboard adaptive model based on UKF to estimate the performance parameters required by the engine control system, resulting in precise control of the performance parameters.Considering that the aircraft engine works in harsh noise environments, Lu et al.25proposed a gas path health monitoring based on PF and constrained Extended Kalman PF (cEKPF), and compared them with EKF.The simulation results show that cEKPF is superior to EKF, PF, and EKPF.Yang et al.26used a nonlinear and non-gaussian particle filter to build an onboard adaptive model to overcome the performance limitations due to the linearity assumption of Gaussian noise in the Kalman filter.The simulation results showed that the number of parameters the proposed particle filter estimated could outnumber the onboard sensors to a certain degree.Considering the shortcomings of traditional PF, Wang et al.27proposed an improved Electromagnetism-like Mechanism-based Particle Filtering algorithm (EMPF) for aircraft engine gas-path component abrupt fault diagnosis.The results showed that the EMPF displayed a short fault diagnosis time and reduced root mean square error of parameter estimation.Yu28developed a data-model-fusion method for the engine health prognostics task accomplished by integrating Logistic Regression and Particle Filtering(LR+PF).The test was carried out on the commercial modular aviation propulsion system simulation platform developed by NASA, and the results show that the proposed method has potential application value.In recent years, CKF began to be improved to promote filtering accuracy and noise adaptability for the parameter estimation of nonlinear systems29–31.Such as Zhu et al.32proposed an Adaptive Square Root Cubature Kalman Filter (ASRCKF) to estimate the health parameters of the turbofan engine gas path components to promote filtering accuracy and noise adaptability.The simulation results show that ASRUKF is superior to the EKF and the Square Root Cubature Kalman Filter(SRCKF).Zhu et al.33integrated the multi-SRCKF and an improved Density-Based Spatial Clustering of Application with Noise (DBSCAN) algorithm to monitor gas turbine sensor faults.
At present, it was proved that compared with EKF, UKF,PF,and CKF better adapt to strongly nonlinear characteristics of the engine and significantly improve the estimation accuracy and robustness without the calculation process of the Jacobian matrix.34–36Still,even though they have been improved in different ways37–40, they need to cost a considerable calculation,which is not ideal for aero-engines.Therefore, Chen et al.41proposed a Spherical Unscented Kalman Filter (SUKF)-based nonlinear onboard high-precision parameter real-time estimation method to reduce the computational burden of these filtering estimators.Compared with UKF, the computational complexity is reduced by one time while maintaining the estimation accuracy.Nonetheless, the numerical divergence of estimation still exists in the case of coupling health parameters because of the system’s accumulated measurement error,noise,and disturbance.
Also, a common problem still exists in all the abovedescribed onboard adaptive models: the limited number of onboard sensors is less than that of the total number of engine components’ health parameters, so the described filters can only estimate a subset of health parameters whose numbers are equal to the number of onboard sensors.To handle this problem, Litt42proposed a Singular Value Decompositionbased Linear Kalman Filter(SVD-LKF),with which all engine health parameters were estimated.Later, Simon and Garg43proposed a Kalman filter-based optimal tuner(OTKF)to estimate the degradation of the engine’s all health parameters.Compared with SVD-LKF, although it improves the estimation accuracy of parameters, obtaining the tuning matrix of the engine’s entire operating range is pretty challenging.Based on OTKF, Csank44and Liu45, et al.proposed an EKF-based Optimal Tuner(OTEKF)which improved the estimation accuracy of the engine’s performance parameters in the transient state.However, compared with OTKF, the estimation accuracy of performance parameters was poor in the stable state.Therefore, applying these methods in engineering is very challenging, and the problems with LKF and EKF also cannot be avoided.
Therefore, considering the problems of the numerical stability and estimation accuracy of the filter used in the current onboard adaptive model in Fig.1, this paper proposed an improved onboard adaptive model for estimating performance parameters of aero-engine based on the onboard adaptive model in Ref.41.Compared with the current SUKF-based onboard adaptive model architecture, the contributions are mainly summarized as follows: (A) An SVD and correction factor-based improved SUKF algorithm (iSUKF) is proposed to improve the stability of iterative calculation of the state covariance matrix in estimation with filter.Furthermore, it provides a satisfactory solution to numerical divergence in health parameters estimation with current Cholesky decomposition-based SUKF caused by uncertain factors such as the engine system’s accumulated measurement error, noise,and disturbance; (B) Due to the limited number of onboard sensors,the established onboard adaptive model can only estimate a subset of engine’s health parameters.In this paper, an offline correction strategy is proposed to solve the inadequate estimation accuracy of health parameters caused by the unestimated health parameters, as well as inaccurate estimation of performance parameters caused by the coupling parameters,etc.This action effectively promotes the onboard adaptive model’s estimation accuracy.These improvements will further promote the maturity of model-based aero-engine performance control technology.
2.iSUKF-based nonlinear onboard adaptive model
All of the Kalman filter-based onboard adaptive models have the same architecture,and their only difference is embodied in the design method of the filter.As shown in Fig.2, the architecture of the iSUKF-based aero-engine nonlinear onboard adaptive model is designed to estimate the real performance parameters which are unmeasurable or difficult to measure.It mainly includes the real engine, nonlinear onboard model,and iSUKF.Under the given same environmental conditions(altitude (Alt), Mach number (Ma), ambient temperature(Tsd, etc) and control input (u), the deviation (Δy) between the real engine measurable output parameters(y) and the onboard model estimation parameters(y^)is given and normalized to Δynor.When Δynor= 0, the nonlinear onboard adaptive model matches the real engine; When Δynor≠0, iSUKF modifies the nonlinear onboard model by estimating the health parameter degradation value of the real engine until the Δynoris equal to zero or within a small enough range of the order of magnitude.At this moment, the nonlinear onboard adaptive model matches the real engine.Thus, the estimated values of the performance parameters, which are unmeasurable or difficult to measure, estimated by the nonlinear onboard model equal the true values of the real engine.The specific design process is described below.
2.1.Discrete nonlinear dynamic model of aero-engine
This paper takes the next-generation high-bypass ratio commercial gear turbofan engine with multivariable as the controlled object.As an ultra-complex time-varying system with strong nonlinearity, high coupling, and a wide working range,the aero-engine discrete nonlinear dynamic model can only be expressed in the following simplified form with unknown functions.
where x indicates the state variables, including fan speed (Nf)and core speed (Nc); u denotes the control input variable,including fuel flow (Wf), variable bleed valve (VBV) and variable area fan nozzle(VAFN);y represents the measurable output variables, including Nf, Nc, the bypass nozzle inlet total pressure(Pt17),the high-pressure compressor(HPC)inlet total temperature (Tt25) and total pressure (Pt25), the high-pressure compressor exit total temperature (Tt30) and static pressure(Ps30), high-pressure turbine (HPT) exit total temperature(Tt45); z represents the performance parameters that are difficult to measure or unmeasurable, mainly including Fnet,smHPC, Tt40, Tt50, etc.; w and v are zero-mean and uncorrelated Gaussian white noise, respectively, implying that w ~(0, Qn)(Qnis the system noise covariance matrix), v ~(0,Rn)(Rnis the measurement noise covariance matrix).h refers to the percentage value of degradation of component health parameters to be estimated in the paper, mainly including fan mass flow (SWFan), low-pressure compressor (LPC) efficiency (SELPC), HPC mass flow (SWHPC) and efficiency(SEHPC), HPT mass flow (SWHPT) and efficiency (SEHPT),low-pressure turbine (LPT) mass flow (SWLPT) and efficiency(SELPT).
The expression of the health parameter degradation value is described as follows:
where the subscript ‘‘X” refers to five rotor components (Fan,LPC, HPC, HPT, and LPT); WX,actand ηX,actrepresent actual rotor component mass flow and efficiency respectively;WX,nomand ηX,nomrepresent the nominal non degraded rotor component mass flow and efficiency respectively; SWXand SEXrepresent the mass flow and efficiency degradation value of the component X, respectively.

Fig.2 Architecture of iSUKF-based aero-engine nonlinear onboard adaptive model.
Remark 1.generally represents the health parameters of the engine components.Since the number of onboard sensors is less than the total number of engine health parameters, honly represents the subset of health parameters (SWFan, SELPC,SWHPC, SEHPC, SWHPT, SEHPT, SWLPT, and SELPT) in the following part.The health parameters that have not been estimated by the Kalman filter are those described in the text,which mainly include fan efficiency (SEFan) and LPC mass flow(SWLPC).When they are involved,they will be specified clearly.
According to the description in Refs.41,46,the health parameter h is considered as a part of the state variable x in Eq.(1).Then, the aero-engine discrete nonlinear system dynamic model with state augmented is expressed as:
2.2.iSUKF
Compared with the UKF, although the current SUKF decreases the calculation cost by nearly-one time via reducing the number of σ points, the conventional Cholesky decomposition47adopted in the filter must guarantee that the state covariance matrix is always totally positive definite(nonsingular)in estimation.However,uncertain factors such as accumulated measurement error, noise, and disturbance in a strongly nonlinear engine system may destroy the positive definiteness of the state covariance matrix, which will inevitably lead to numerical divergence or failure of the filter.Therefore, this paper proposes a Singular Value Decomposition (SVD)48and correction factor-based improved SUKF to deal with this problem, as shown in Fig.3.Compared with the SUKF, it mainly replaces the Cholesky decomposition with the SVD,which is numerically stable without any strict requirement for the state covariance matrix.Meanwhile,a correction factor is designed to assess the measurement deviation between the real engine and the nonlinear onboard model to correct the state covariance matrix,thus maintaining better numerical stability of parameters estimated by the filter.
In the flight cycle of the engine,with the same input and the same environmental conditions, the deviation (Δyk+1) is defined as the difference between the real engine measurable output parameters (yk+1) and the onboard model estimation parameters (^yk+1).Consequently, the normalization deviation(Δynor,k+1) is easily obtained.Then, the iSUKF estimates the engine’s current health parameters degradation value based on this normalization deviation and corrects the nonlinear onboard model.This estimation process mainly includes three parts:
(1) Calculation of σ points: according to the posterior state estimation and the posterior state estimation error covariance matrix propagated, calculate the σ points using a spherical unscented transformation rule.49In this process, the posterior state estimation error covariance matrix is processed by SVD rather than Cholesky decomposition.
(2) Time update: according to the σ points, calculate the prior state estimation and the prior state estimation error covariance matrix and correct them by the correction factor.
(3) Measurement update: according to the normalization deviation, calculate the posterior state estimation and the posterior state estimation error covariance matrix by the obtained state and output estimation error matrices, as well as the estimation error cross-covariance matrix.
According to the discrete nonlinear system expression of the aero-engine described by Eq.(3), an iSUKF-based onboard adaptive model is established.Among them, the specific design process of the iSUKF is described as follows.
Step 1.let k = 0, and initialize the posterior state estimationand the posterior state estimation error covariance matrixby the initial state (xaug,k):
Step 3-Step 5 are the calculation process of σ points using a spherical unscented transform rule.
Step 3.Calculate the weighting coefficient (W)of the mean and covariance matrix:
where i refers the index; n is the number of the state variable;The value of W(0)only affects the fourth-order or higher-order term of the σ points.It is equal to zero generally.Thus, all W(i)(i = 1, 2,...,n + 1) values are the same.
Step 4.Calculate the σ points matrix (δ) via the weighting coefficient.
When j = 1:
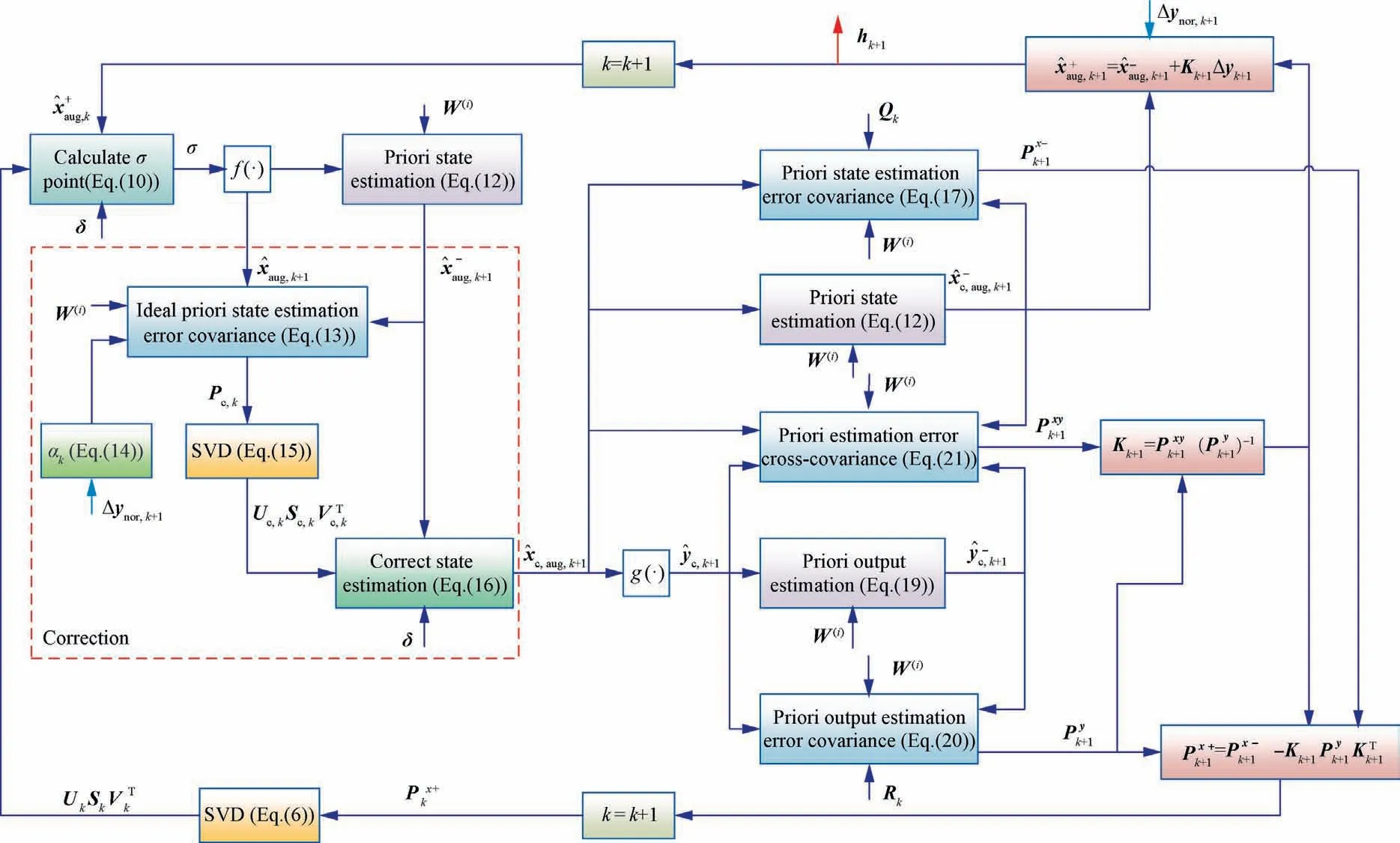
Fig.3 Schematic diagram of iSUKF.
When j = 2,3,...,n, δ is obtained by recurrence relation of Eq.(9).
where 0jrepresents a column vector composed of the j number of 0.
Step 5.Calculate the spherical σ points byat time k.
So,there are only n+2 σ points.Compared with the UKF using a general unscented transform rule(2n+1 σ points),its computational cost has nearly halved.
Step 6.Time update.
(1) With the known nonlinear system state function (f(∙,∙)),calculate the posterior state sample value (^xaug,i,k+1)based on the σ points.
At time k + 1, the prior state estimationis
(2) In this paper, a correction factor is designed to balance the weight of onboard model information and observation information to improve the iterative stability of the state covariance matrix in the filter.47,50Then, the ideal state error covariance matrix (Pc,k) with the correction factor is calculated, as shown in Eq.(13).
where αkis a correction factor, it is defined as follows:
(3) Pc,kis processed by SVD.
Then, the corrected is obtained.
(4) The corrected prior state estimation () is obtained according to Eq.(12).
(5) Calculate the prior state estimation error covariance matrix () at time k + 1.When considering the process noise, Qk+1is added.
Step 7.Measurement update.
(1) With the known nonlinear system output function(g(∙,∙)), the posterior output sample value (^yc,i,k+1) is calculated.
At time k + 1, the prior output estimation () is
(2) Calculate the prior output estimation error covariance matrix () at timek + 1.When considering the measurement noise, Rk+1is added.
(3) The prior estimation error cross-covariance matrix() at timek + 1 is calculated:
Step 8.Calculate the Kalman filter gain matrix (Kk+1) and update the posterior state estimation () and the posterior state estimation error covariance matrix ():
Step 9.let k = k + 1, propagateandat the next time, and return to Step 2.Meanwhile, the value of the estimated health parameters fromis extracted to correct the nonlinear onboard model.When the deviation is eliminated, the value estimated by the nonlinear onboard model is approximated to the true value of the engine.
Therefore, an iSUKF-based nonlinear onboard adaptive model has the ability to estimate the real value of the current health parameters and performance parameters of the real engine in real time while ensuring estimation accuracy, low computational cost, and numerical stability.
3.Offline correction strategy
As described in Section 2, the fan efficiency (SEFan) and lowpressure compressor mass flow (SWLPC) are ignored.This is because the filter cannot estimate all health parameters (usually ten) as they outnumber the onboard sensors (usuallyeight) and only can estimate their subset.Therefore, with the flight-cycled operation of the aero-engine within the entire life cycle,there is also a degradation of unestimated health parameters(SEFanand SWLPC),which will undoubtedly affect the filter’s accurate estimation for other health parameters and performance parameters.Furthermore, the research found that there is a phenomenon of the existence of the coupling health parameters.14,28The accumulated estimation error also quickly reduces the estimation accuracy of the onboard model for these estimated parameters.Therefore,these circumstances should be considered.
3.1.Architecture
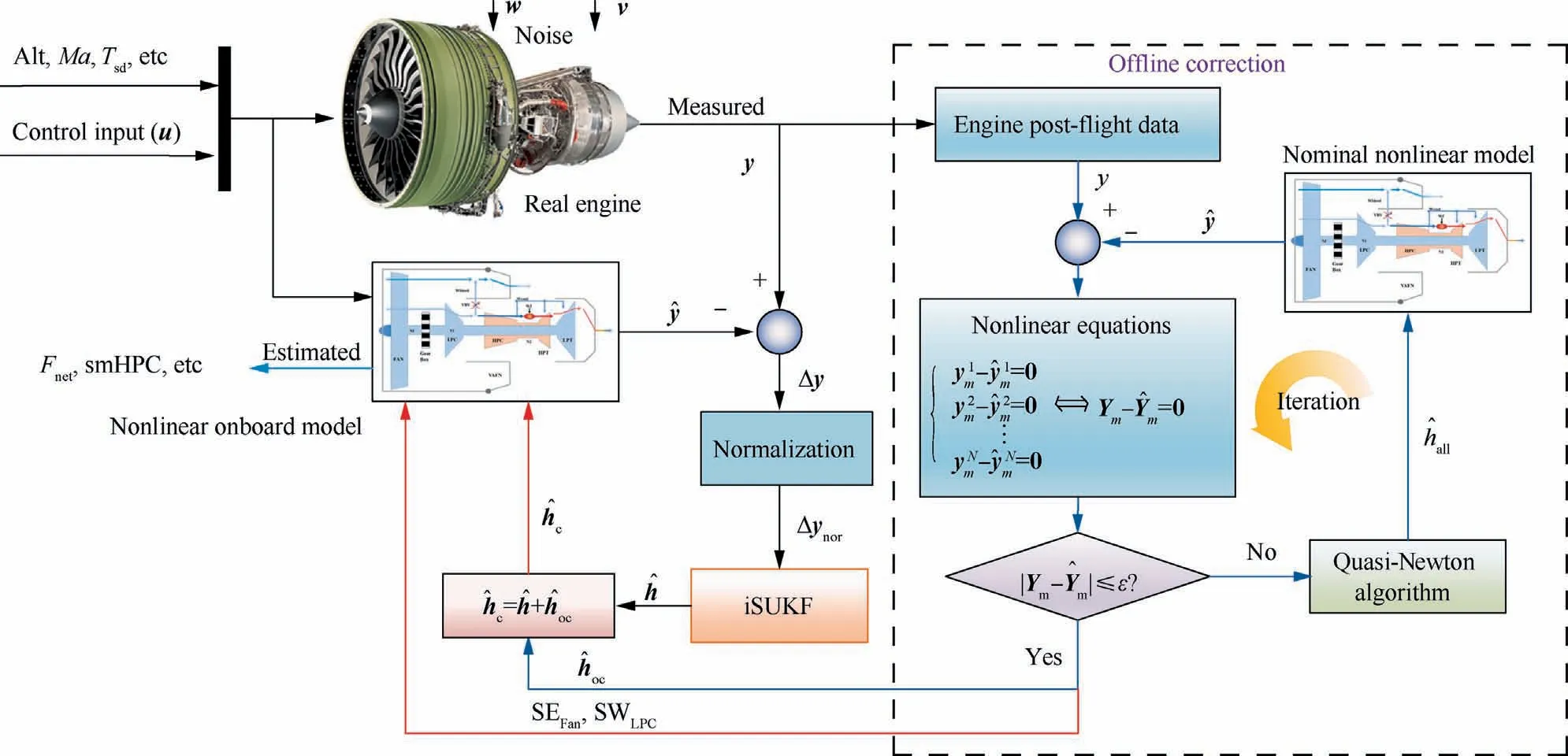
Fig.4 Architecture of iSUKF-based aero-engine nonlinear onboard adaptive model with offline correction.
An iSUKF-based aero-engine nonlinear onboard adaptive model with offline correction is proposed to handle these problems,as shown in Fig.4.Firstly,when the engine is running in the flight cycle,the deviation(Δy)between its measurable output parameters value(y)and the estimated measurable output parameters value (y^) of the nonlinear onboard model is calculated in real-time,and then Δynoris obtained by the normalization; Secondly, iSUKF will accurately estimate the degradation value of real engine’s health parameter subset(^h)based on Δynor;Then,when unestimated health parameters have no degradation (i.e., ^hc=^h), ^h is directly used to correct the nonlinear onboard model.When the unestimated health parameters exist a degradation, iSUKF will eliminate the caused deviation Δy of measurable output parameters and distribute this degradation to other estimated health parameters.Although the estimation of the healthy parameter subset deviates from the true degradation and certain estimation accuracy of unmeasurable parameters with the corrected nonlinear onboard model is lost, the estimated value is still trustworthy.However, there will be more lost accuracy with increased engine flight cycles, resulting in decreased confidence.Hence,in this paper, the designed nonlinear equations (Eq.(25)) are solved by the quasi-Newton iteration algorithm based on the collected engine post-flight data set after one or several times of flight cycles to get the current degradation value([^hoc,SEFan,SWLPC]) of the engine, as indicated with the ‘‘orange”dashed box in Fig.4.Therefore,in the subsequent flight cycles of the engine,more accurate estimated health parameter subsets(^hoc),SEFan,and SWLPCcan be obtained by the offline correction strategy.Finally, the nonlinear onboard model will be corrected simultaneously by ^hc(Eq.(26)), SEFan, and SWLPC.
where ^h represents the degradation of health parameters estimated by iSUKF; ^hocrepresents the degradation of health parameters obtained by the offline correction; ^hcrepresents the degradation of health parameters finally obtained for correcting the onboard model.
Remark 3.Since the degradation of an aircraft engine components during a flight cycle is a prolonged process, it is generally believed that there is no degradation in the transient transition state.Therefore, in the iterative solution process of Eq.(25), the flight data of the engine in the transition state is generally selected, which is also conducive to ensuring the irrelevance between the data.This action will lead to the solved actual degradation of all health parameters is a unique value.
The offline correction strategy reduces the estimation error caused by estimating engine components degradation through the subset of health parameters.Meanwhile, the inaccurate estimation caused by the coupling between some health parameters has also been alleviated (the coupling mainly perform that a measurable output can have multiple solutions of health parameters or the degradation of one health parameter can be compensated by another or more health parameters).
3.2.Iterative solution of all health parameters
It is obvious from Eq.(25)that the offline correction strategy,from the view of mathematics,is considered a math problem of solving nonlinear equations.Therefore, although the quasi-Newton algorithm51belongs to a local optimal algorithm, as one of the most effective algorithms to solve the nonlinear equations, it is used to quickly solve the optimal solution of Eq.(25) containing an engine nonlinear system (g(∙,∙)) that is difficult to express in a specific mathematical analysis form.
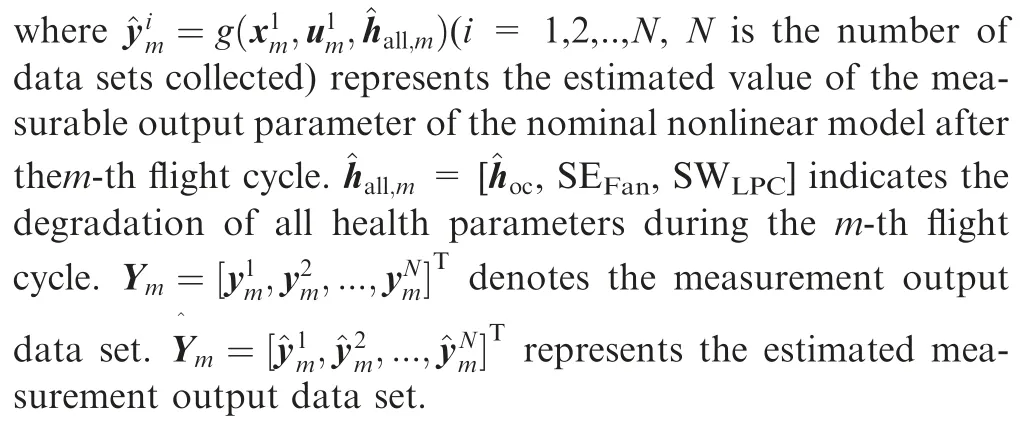
As the independent variable, The solution ^hall,mof Eq.(25)is obtained through an continuous iteration process until the error (ε)between the Ymandis sufficiently small.The iterative solution process of the quasi-Newton algorithm is described as follows.
Let’s assume that the initial predicted value of the solution of Eq.(25) is, andis the approximate value of the t-th iteration.
Note Eq.(25) as.
Since G(^hall,m)=0 is multivariable nonlinear equations,the value of A(t+1)in above equation cannot be determined.Therefore, it is necessary to construct a calculation formula with a recursive structure.
where ΔA(t)is an incremental matrix,with its rank greater than or equal to 1.
Let’s assume that the rank of ΔA(t)is equal to 1.In order to simplify the problem and reduce the computation load, we let
Reasonable u(t)and υ(t)are selected to satisfy Eq.(29),namely
When(υ(t))Tp(t)≠0, there is
Usually, let υ(t)=p(t).
Based on above equation, we can get
Then, the quasi-Newton iteration equation for solving Eq.(25) is obtained as follows:
According to Eq.(38),the current degradation value of real engine’s health parameters can be solved through a continuous iterative process.
Remark 5.The solution of the above nonlinear equations(Eq.(25))exists and is unique.Firstly,we simplify the expression of Eq.(25) to a matrix form.
Accordingto the conditionsof solvability ofnonlinear equations,52when rank([Xm,Um])=rank ([Xm,Um,Ym]),the solution of Eq.(25) exists and is unique.This condition can be met by selecting the engine transient state data set instead of the steady state data set.
4.Simulation and verification
This paper establishes a simulation platform for an iSUKFbased aero-engine nonlinear onboard adaptive model with offline correction.Assume that the real engine’s state noise and measurement noise are set41: Q = 0.022I, R = 0.022I; The designed parameters of the iSUKF’s are set as follows:W(0)=0,β=2.The solution accuracy of the nonlinear equations is set: ε = 10-6.
To verify the effectiveness of the proposed method, this paper gives a discussion of the following two cases in the engine’s maximum operating conditions on the ground in the standard atmospheric environment.
Case 1.The engine components have no degradation
The iSUKF proposed mainly solves the numerical divergence of the current filter (SUKF).Let’s assume that the engine components are not degraded, and the estimation results of health parameters(h)with UKF,SUKF,and iSUKF are compared, as shown in Fig.5.It can be seen that there is no estimation deviation regarding SWFan, SELPC, SWHPC,SEHPC,and SWHPT.However, the numerical divergence exists in the estimation process for SEHPT, SWLPT, and SELPTby UKF and SUKF, but iSUKF does not.The iSUKF always maintained the numerical stability of the SEHPT, SWLPT, and SELPT.The result clearly proves that the proposed iSUKF solves the numerical divergence in the estimation process of UKF and SUKF.
Case 2.The engine components have degradation
Since the number of onboard sensors is less than the total number of health parameters, the influence of unestimated health parameters on the estimated parameter estimation with the designed onboard adaptive model is considered in the following two circumstances.
(1) Assuming the SEFanand SWLPChave no degradation
Within t = 0–200 s, the engine undergoes the following degradation process: At t = 20 s, SWFan= - 2.5 %; At t = 40 s, SELPC= - 2.0 %; At t = 60 s, SWHPC= -4.5%; At t = 85 s, SEHPC= -3.5 %; At t = 110 s, SWHPT= +2%; At t = 130 s, SEHPT= - 3.0 %; At t = 160 s,SWLPT= +0.3 %; At t = 180 s, SELPT= - 0.6 %.Meanwhile, under the same conditions, it is assumed that there are no degradation of unestimated health parameters (SEFanand SWLPC).
Fig.6 shows the estimation results of health parameters by UKF, SUKF, and iSUKF, respectively.After the step degradation of the real engine’s health parameters, these filters can accurately estimate the true degradation value of the engine components within 3 s.
The performance indices of Root Mean Square Error(RMSE) (Eq.(40)) and Standard Deviation (RMSD) (Eq.(41)) are used to reflect further the estimation accuracy of the health parameters with each filter.As shown in Table 1,UKF, SUKF, and iSUKF have approximately the same sum of RMSE and RMSD.They perform the same estimation accuracy of health parameters.
where i is the index of sampling step; N is the total number of sampling steps;is the mean of ^h.
After the nonlinear onboard model is corrected as per the health parameters estimated by the filter, the true value of the engine performance parameters that are unmeasurable or difficult to measure can be calculated,as shown in Fig.7.They can well estimate the Fnet,smHPC,Tt40,and Tt50of the engine,with an estimation error of approximately 0%.However,after t=130 s,there is a certain deviation of the estimation of Tt50because of the degradation of SEHPT,SWLPT,and SELPT.Similarly, in Table 2, it can be seen from the statistics data of RMSE and RMSD of these performance parameters that the onboard adaptive models designed based on each filter all achieve the same estimation accuracy of the engine performance parameters.
Remark 6.In Fig.7, ΔFnetmeans the deviation of the normalized thrust of the engine under maximum operating conditions on the ground in the standard atmospheric environment.ΔsmHPC, ΔTt40, and ΔTt50mean the deviation between the degraded engine and nominal engine, respectively.
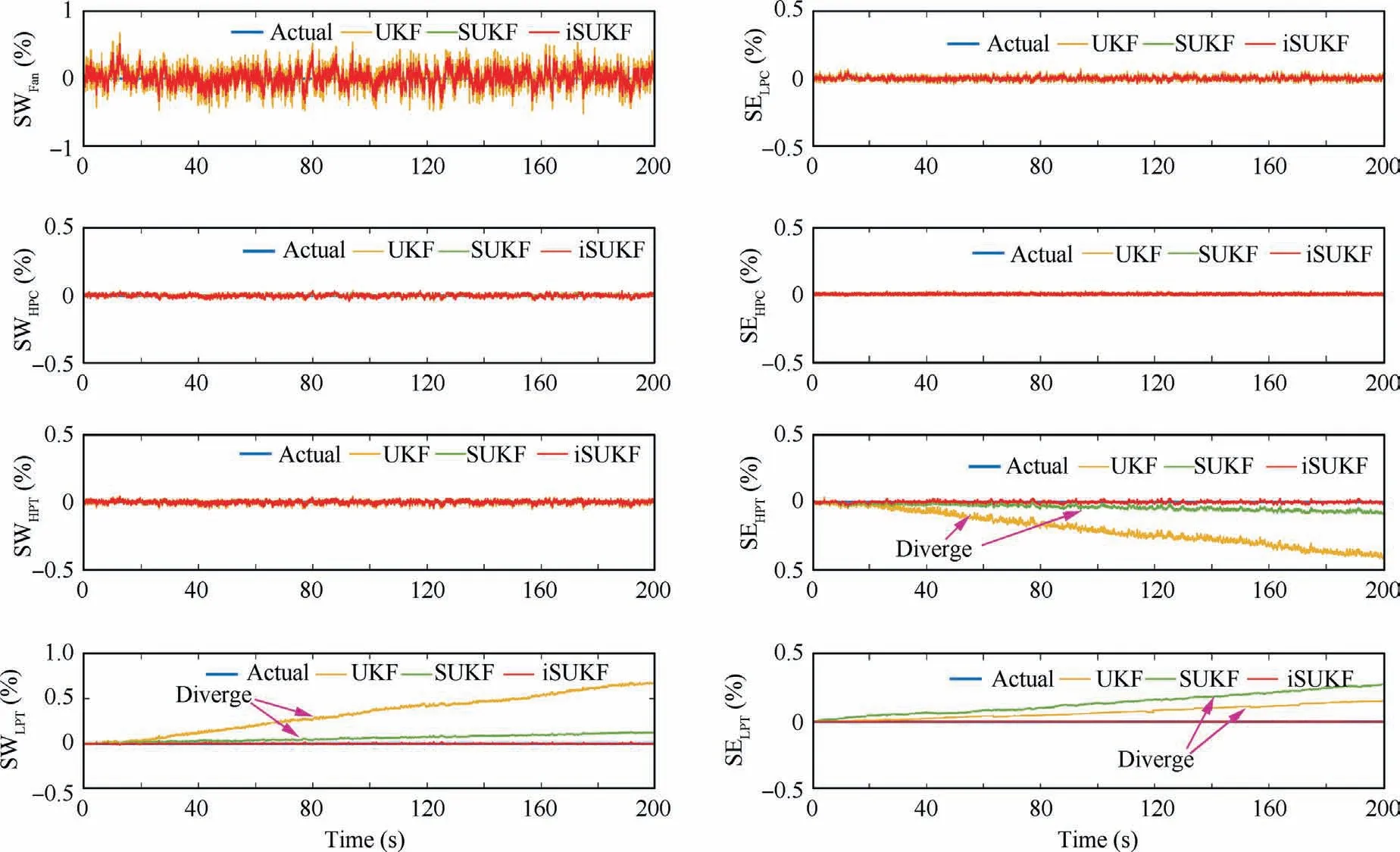
Fig.5 Engine components have no degradation: the estimation result of health parameters by UKF,SUKF, and iSUKF,respectively.
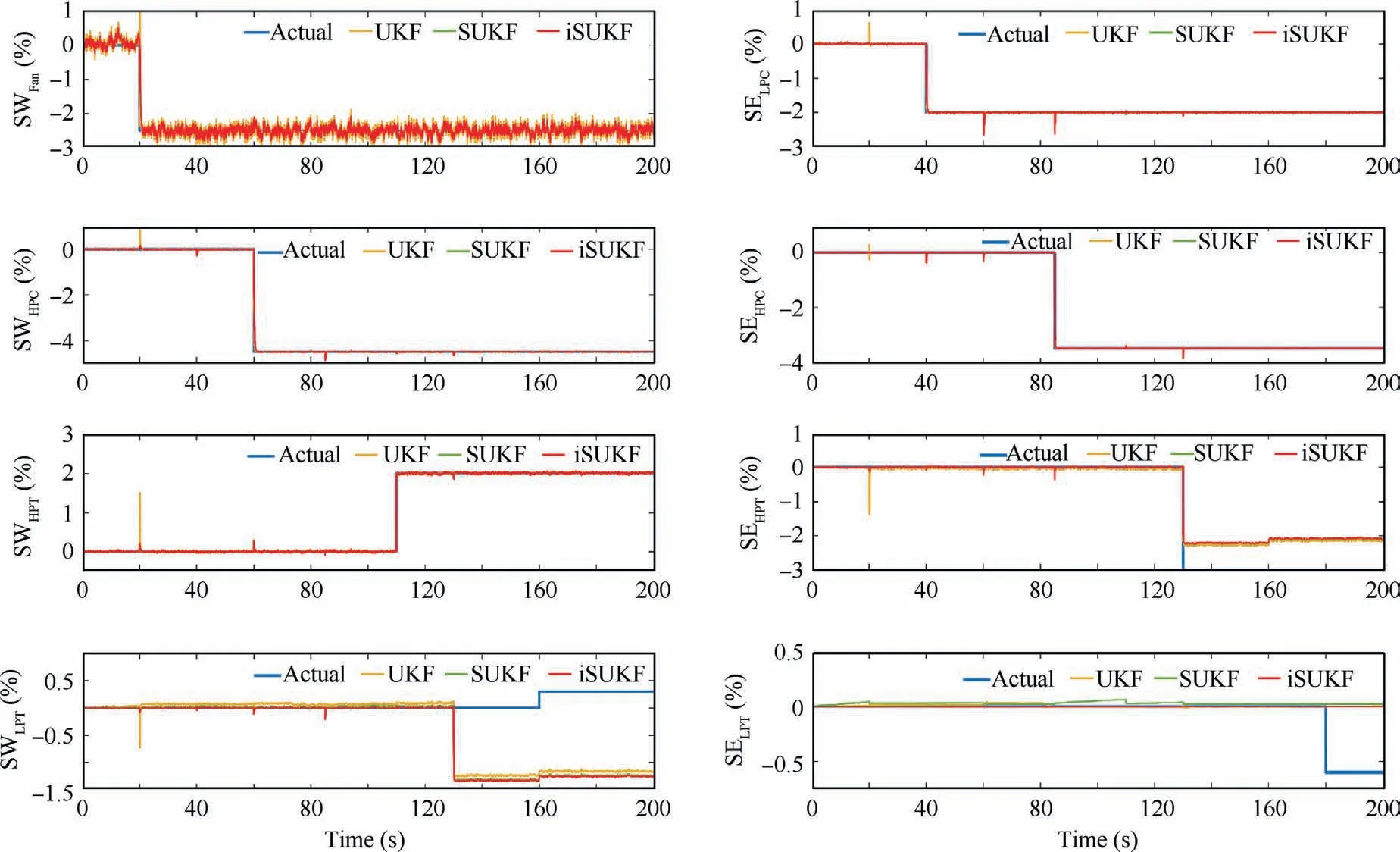
Fig.6 Assuming SEFan and SWLPC have no degradation: estimation result of health parameters by UKF, SUKF, and iSUKF,respectively.

Table 1 Health parameters estimation error without degradation of SEFan and SWLPC (nominal noise).
(2) Assuming the SEFanand SWLPChave degradation.
In this paper, considering the slow degradation process of engine components during the actual flight cycle,we use seven groups of adjacent flight cycles to replace 6000(the total number of flight cycles in the whole life cycle) actual flight cycles described in Ref.53to simulate the degradation process of the aero-engine.The engine components’ degradation values of these 14 flight cycles are shown in Table 3.It is assumed that the SEFanand SWLPCin the next flight cycle do not degrade to simulate that this next flight cycle is adjacent to the previous flight cycle in the whole engine life, such as the 1 →2, 3 →4,5 →6, 7 →8, 9 →10, 11 →12, and 13 →14.Conversely, in the following flight cycles, 2 →3, 4 →5, 6 →7, 8 →9,10 →11, and 12 →13 do not belong to adjacent flight cycles because of the different degradation values of the SEFanand SWLPC.Of course, these nonadjacent flight cycles can also be considered as the case where the SEFanand SWLPCare degraded between two adjacent cycles.
Remark 7.The engine components degrade slowly during the whole life cycle.53After several flight cycles,the components may also degrade by about 0.1 %.This also means that the degradation process of two adjacent flight cycles will not occur approximately.To better embody the benefits of the offline correction strategy, the degradation values given in Table 3 occur abruptly when simulating flight cycles.

Fig.7 Assuming SEFan and SWLPC have no degradation: estimation result of performance parameters by UKF, SUKF, and iSUKFbased onboard adaptive model, respectively.

Table 2 Performance parameters estimation error without degradation of SEFan and SWLPC (nominal noise).
Firstly,an offline correction strategy is designed to alleviate the influence of the degradation of unestimated health parameters and the coupling of some estimated health parameters on the estimation accuracy, which resulting the improvement of the estimation accuracy of the health parameters and performance parameters by the onboard adaptive model with the entire life cycle of the engine.
Secondly, considering that the offline correction process is the same after each flight cycle, the paper takes the adjacent 7th and 8th flight cycles as examples to clearly describe the benefit of the offline correction strategy.The engine flight data is collected and stored during the 7th flight cycle.After the flight end, a data set D(X4, U4, Y4) in a transient process can ensure the irrelevance of data vectors is selected and applied in the quasi-Newton iteration algorithm to solve the degradation value (^hall,7) of the real engine components.The relative error of the obtained solution for SWFan, SEFan, SWLPC,SELPC, SWHPC, SEHPC, SWHPT, SEHPT, SWLPT, and SELPTare - 1.3 %, -6.02 %, -0.01 %, -0.35 %, +0.4 %,+0.2 %, -0.16 %, -1.31 %, +20.25 %, and + 6.15 %,respectively, as shown in Fig.8.It is inevitable that the measurement noise and model errors cause the existence of these errors.Although there is a large error in solving some health parameters, the degradation trend of all health parameters is fully reflected.Furthermore, a satisfactory correction is made to the unestimated health parameters and the strongly coupled health parameters, which provides effective compensation to the nonlinear onboard model.
Thirdly, a correction is made to the nonlinear onboard model by the health degradation value obtained through an offline correction strategy after the 7th flight cycle of the engine (Fig.4), and the 8th flight cycle is carried out.It is assumed that the engine components’ health parameters are degraded, as shown in Table 3.Then, under the same conditions, the estimations of the engine’s health parameters withUKF, SUKF, iSUKF, and iSUKF with offline correction strategy(OC-iSUKF)during the 8th flight cycle are compared and tested, respectively.As shown in Fig.9, although UKF,SUKF,and iSUKF achieve satisfactory estimation for SWFan,the large estimation error of other health parameters is caused due to the degradation of unestimated health parameters and the coupling of other relevant health parameters.However,thanks to the function of offline correction strategy, OCiSUKF achieves accurate estimation of all health parameters.As shown in Table 4, it can be further seen from the RMSE and RMSD of the estimation of health parameters with all filters that the RMSE of OC-iSUKF is smaller than that of UKF, SUKF, and iSUKF, which means higher estimation accuracy.It eliminates the influence of degradation of unestimated health parameters and the coupling of other relevant health parameters.
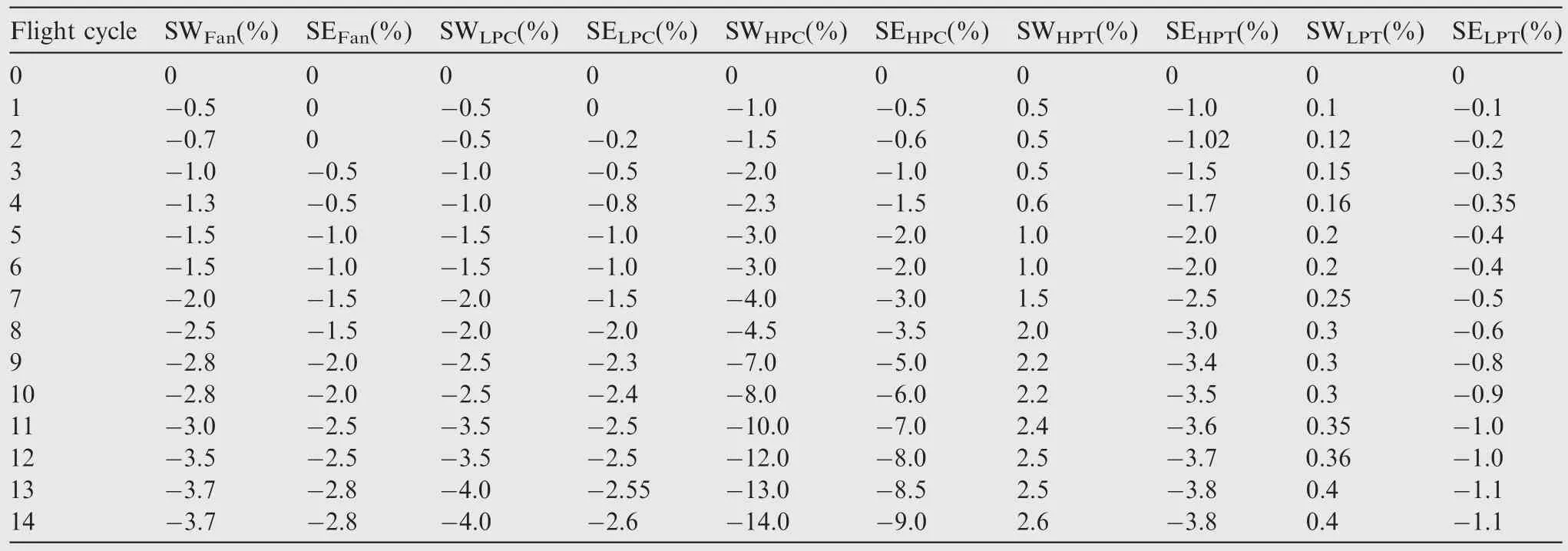
Table 3 Degradation values of health parameters of engine components in the whole life cycle.
Remark 8.Although there is a considerable deviation in the estimation of health parameters with UKF,SUKF, and iSUKF,the changes in their estimation are consistent when the engine components are degraded.The reason for this deviation is that,in order to eliminate measurable output deviation caused by the unestimated health parameters, the filter allocates the degradation of unestimated health parameters to the degradation value of other relevant health parameters, thus causing the estimated values of other relevant health parameters to deviate from the true values.
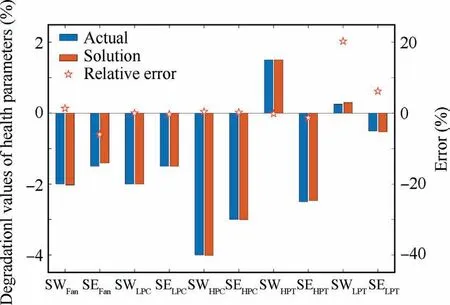
Fig.8 Degradation value of all health parameters solved through offline correction after 7th flight cycle.
Remark 9.In Table 4, the RMSD of each filter is approximately the same.The degradation of the engine components during the 8th flight cycle can still be estimated when the engine components are degraded without considering the deviation between the estimated value and the true value.This also shows the consistency of the filter’s estimation of the degradation change of health parameters when the engine components degrade.
Fig.10 shows the engine’s performance parameters estimation results by the onboard adaptive models based on UKF,SUKF, iSUKF, and OC-iSUKF, respectively.It can be seen intuitively that the OC-iSUKF achieves better estimation of the true value of the engine performance parameters and eliminates the influence of inadequate estimation with UKF,SUKF and iSUKF caused by the degradation of unestimated health parameters, which greatly improves the estimation accuracy of the parameters (Table 5).
Remark 10.In Table 5, the estimation errors of iSUKF and SUKF for Fnet, smHPC, and Tt40were the same.However,iSUKF is 1 K larger than SUKF for Tt50.What caused this phenomenon is the coupling of SEHPTand SELPTin the case of the degradation of SEFanand SWLPC.The degradations of SEFanand SWLPCchange the operating point of the engine.To eliminate the measurement deviation(Δy),his estimated to adapt to the real engine state.Since the SEHPTand SELPTare coupled,they have different combinations (case of multiple solutions).Namely, the different filters have different estimation values.Actually, within t = 0–200 s, the estimation accuracy of SUKF for SEHPTand SELPTis higher than that of iSUKF, so the estimation accuracy of SUKF for Tt50is higher than iSUKF.However, the SUKF has a numerical instability that will continue to diverge as time goes on.The iSUKF costs the estimation accuracy of Tt50to maintain numerical stability.The final estimation accuracy still meets the requirements.

Fig.9 Assuming SEFan and SWLPC have degradation:estimation result of health parameters by UKF,SUKF,iSUKF,and OC-iSUKF,respectively.
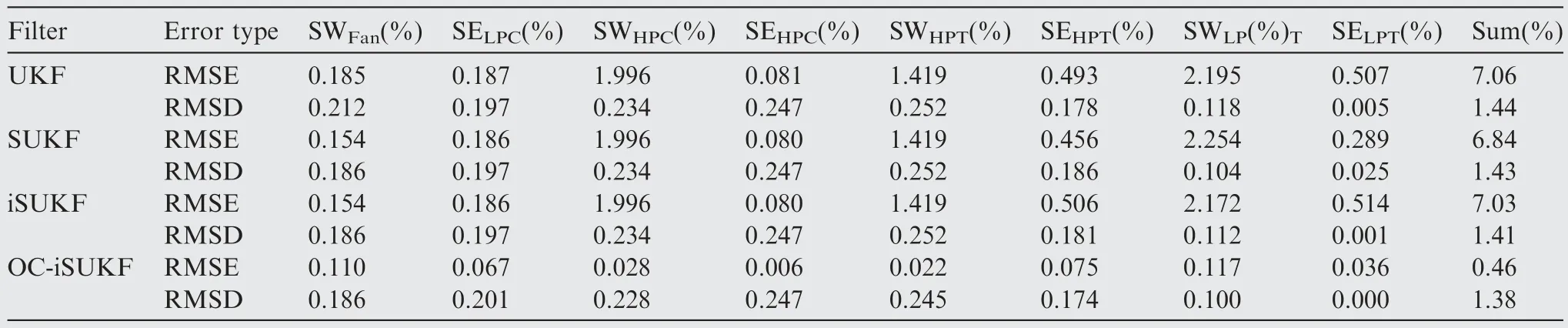
Table 4 Health parameters estimation error with degradation of SEFan and SWLPC (nominal noise).
Finally, the estimation results of the nonlinear onboard adaptive models for the performance parameters based on UKF, SUKF, iSUKF, and OC-iSUKF are statistical from the 1st to 14th flight cycles,respectively.As shown in Table 6,the estimation accuracy of these nonlinear onboard adaptive models for the performance parameters is explicitly compared with the calculated relative estimation error (Eq.(42)).The estimation accuracy of iSUKF is basically the same as that of UKF and SUKF.However,during the 13th and 14th flight cycles,the error between the nonlinear onboard model and the real engine is too large due to the large degradation value of the unestimated health parameters (SEFanand SWLPC).These filters fail to estimate when the other estimated health parameters also have greater degradation.Instead, the OC-iSUKF has a high estimation accuracy during the 13th and 14th flight cycles.Among them,the estimation accuracy of OC-iSUKF is the same as that of iSUKF when no correction process is performed before the 1st flight cycle.
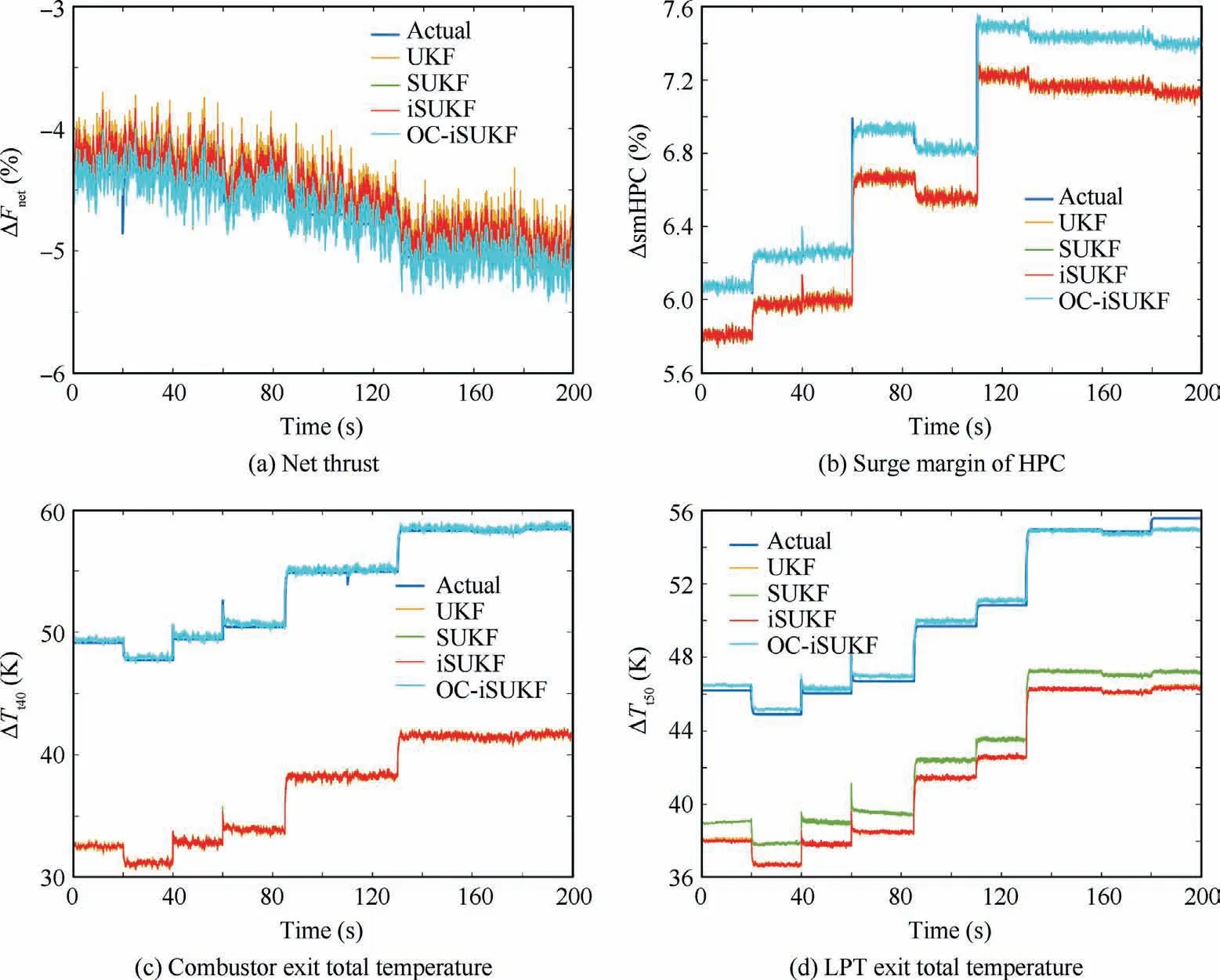
Fig.10 Assuming SEFan and SWLPC have degradation:estimation result of performance parameters by UKF,SUKF,iSUKF,and OCiSUKF-based onboard adaptive model, respectively.

Table 5 Performance parameters estimation error with degradation of SEFan and SWLPC (nominal noise).
In all flight cycles, Fig.11 shows that the degree of degradation of the estimated health parameters affects the estimation accuracy of the estimated health parameters by UKF,SUKF, iSUKF, and OC-iSUKF.As the number of flight cycles increases, the degradation value of health parameters also increases.Thus,the estimation accuracy of UKF,SUKF,and iSUKF for the performance parameters becomes worse and worse.The estimation accuracy of OC-iSUKF for the performance parameters is only affected slightly.Although the estimation accuracy is lower when there is unestimated health parameter degradation between two adjacent flight cycles than when there is no unestimated health parameter degradation between two adjacent flight cycles, the accuracy is still high.For the corrections of these flight cycles, such as 1 →2,3 →4, 5 →6, 7 →8, 9 →10, 11 →12, and 13 →14, which are defined as the corrections of the adjacent flight cycles,and the estimation accuracy of these performance parameters is improved to 0.01 %.For the corrections of these flight cycles, such as 2 →3, 4 →5, 6 →7, 8 →9, 10 →11, and 12 →13, which are defined as the corrections of the nonadjacent flight cycles or the corrections of the flight cycles with a degradation process of unestimated health parameters (SEFanand SWLPC) compared with the previous flight cycle, the estimation accuracy of performance parameters is also improved by more than 50 %.This fully embodies the benefits brought by the proposed offline correction strategy.
Consequently, the effectiveness of the proposed method is verified by the comparison test under different cases.The expected results are realized.The problems of the numerical stability and estimation accuracy of the nonlinear onboard adaptive model are successfully handled.Significantly the proposed offline correction strategy greatly improves the estimation accuracy of the nonlinear onboard adaptive model for performance parameters that are difficult to measure or unmeasurable.
5.Conclusions
In this paper,from the background of model-based engine performance control, an iSUKF-based onboard adaptive model with an offline correction strategy is proposed to estimatethe true values of the engine performance parameters.The improvement of SUKF algorithm and the design of the offline correction strategy solves the numerical divergence of the current unscented Kalman filter-based onboard adaptive model and eliminates the influence of unestimated health parameters on the estimation accuracy of health parameters within the entire life cycle of the engine.The simulation results prove its effectiveness, and the following main conclusions are summarized as follows:

Table 6 Relative estimation error of performance parameters.
(1) An iSUKF-based onboard adaptive model is established to solve the numerical divergence in the estimation of the coupled estimated health parameters with UKF and SUKF while guaranteeing the estimation accuracy of health parameters is unchanged.Thus, this improvement ensures the numerical stability of parameter estimation by the nonlinear onboard adaptive model.
(2) An offline correction strategy is proposed to eliminate the influence of the degradation of unestimated health parameters or the inadequate estimation of the coupled health parameters.This action improves the estimation accuracy of the nonlinear onboard adaptive model for the values of health parameters degradation and performance parameters of the engine.
(3) The simulation tests prove the effectiveness of the proposed method.The results show that iSUKF has the same estimation error for performance parameters as UKF and SUKF, both of which are approximately 0% when the unestimated health parameters have no degradation.The OC-iSUKF improves the estimation accuracy of the iSUKF-based onboard adaptive model for the performance parameters of the real engine.For the adjacent flight cycles, the estimation accuracy for the performance parameters is improved to 0.01%.For the nonadjacent flight cycles or the flight cycles with a degradation process of unestimated health parameters(SEFanand SWLPC) compared with the previous flight cycle, the estimation accuracy for the performance parameters is improved by more than 50%.
Therefore, the proposed method solves the existing methods’ drawbacks with better application advantages.Furthermore, it provides good technical support and a theoretical basis for model-based advanced control in the future.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This study was supported by the National Natural Science Foundation of China (Nos.51906103, 52176009).
 CHINESE JOURNAL OF AERONAUTICS2023年10期
CHINESE JOURNAL OF AERONAUTICS2023年10期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Experimental investigation of typical surface treatment effect on velocity fluctuations in turbulent flow around an airfoil
- Oscillation quenching and physical explanation on freeplay-based aeroelastic airfoil in transonic viscous flow
- Difference analysis in terahertz wave propagation in thermochemical nonequilibrium plasma sheath under different hypersonic vehicle shapes
- Flight control of a flying wing aircraft based on circulation control using synthetic jet actuators
- A parametric design method of nanosatellite close-range formation for on-orbit target inspection
- Bandgap formation and low-frequency structural vibration suppression for stiffened plate-type metastructure with general boundary conditions