基于粒子群优化的空气悬架自适应反推控制策略*
2023-11-11 04:02袁春元王兴宸陶振兴朱爱鑫
中国农机化学报 2023年10期
袁春元,王兴宸,陶振兴,朱爱鑫
(江苏科技大学机械学院,江苏镇江,212000)
0 引言
半主动空气悬架具有弹性刚度可变的特性,能够较好地吸收外界的振动能量,并且重量较轻、噪声较小[1]。近年来,对半主动空气悬架进行了广泛的研究,主要是PID控制、模糊控制、遗传算法控制等方法[2-5]。
本文所用控制策略为自适应反步递推控制,它是通过选择合适的Lyapunov函数和反推控制相结合,考虑模型中的参数不确定性和外部扰动进而保证系统的性能要求。在此过程中,自适应反步递推控制产生了两种不同的设计方法,分别为QLF(Quadratic Lyapunov Function)方法和BLF(Barrier Lyapunov Function)方法。如Pang等[6]针对主动悬架的参数不确定性和安全约束问题提出一种基于约束的自适应反步递推的跟踪控制器,并通过仿真验证效果。Goyal等[7]使用遗传算法对自适应反步递推主动悬架进行优化,对车辆的垂直位移进行比较研究。此外,Wang等[8]基于模糊控制和滑模反步递推控制相结合的方法,对空气悬架进行仿真分析。同时,由于控制器中的参数是根据经验所选取的数值,所以本文提出粒子群优化算法(Particle Swarm Optimization,PSO)进行数据寻优,该算法简单易实现、效率高、全局寻优能力强[9]。
为进一步提高车辆的行驶平顺性,本文以半主动空气悬架为控制目标,考虑系统参数的不确定性,建立基于非紧急制动工况下的半主动空气悬架系统动力学模型,引入虚拟控制和参考轨迹设计Lyapunov函数,构造自适应控制律,使得系统能够快速跟踪,满足系统的安全约束。分析零动态系统的稳定性,保证约束有界。对基于自适应反步递推的控制策略使用粒子群算法对增益参数进行优化,在满足原定要求的情况下使系统的性能进一步提高。最后对所设计的控制器进行仿真验证与分析。
1 非紧急制动空气悬架系统建模
为了简化研究过程,假设所研究的车辆及其行驶道路左右两侧是完全对称的,以其半侧作为研究对象具有代表性,建立如图1所示的1/2半主动空气悬架车辆系统模型。
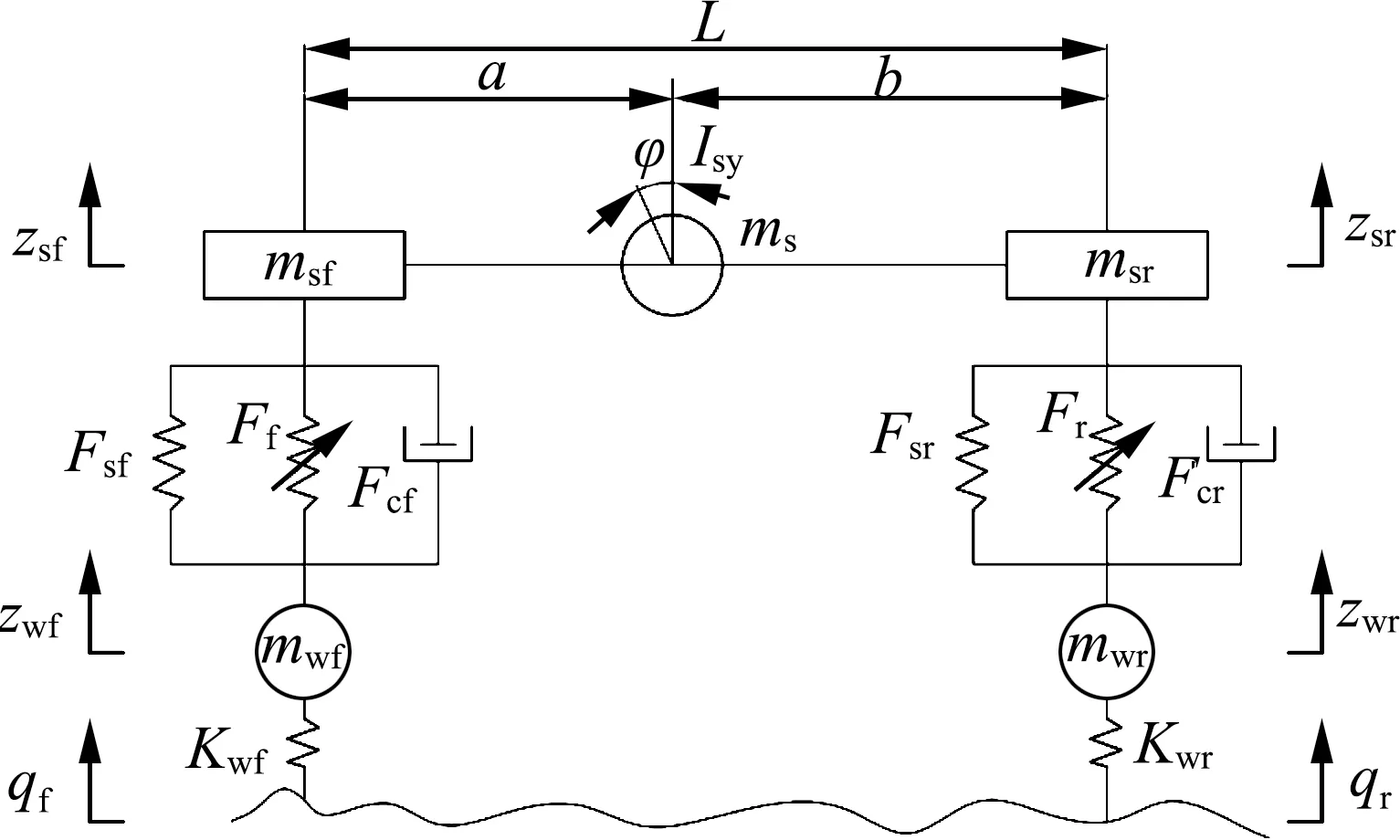
图1 1/2半主动空气悬架车辆系统模型
图1中ms为悬挂质量,其中msf、msr为ms作用于前、后悬架的等效质量;Isy为ms绕y轴的转动惯量;mwf、mwr为作用于前、后车轮的非悬挂质量;a、b和L为车身质心至前、后轴距离和轴距;Kwf、Kwr为前、后轮胎刚度系数;φ为车身俯仰角度;qf、qr为汽车前、后轮道路激励位移;zwf、zwr为前、后轴非悬挂质量的垂向位移;zsf、zsr为前、后悬架等效质量的垂向位移;zs为车身质心处的垂向位移;Ff、Fr为前、后空气弹簧的可变作用力;Fsf、Fsr为前后悬架定刚度力;Fcf、Fcr为前后悬架定阻尼力。
在车辆行驶中会出现制动减速工况,分为紧急和非紧急。非紧急制动的减加速度较小,约0.2~0.4 g。在汽车制动时,一般只考虑纵向运动,没有驱动力,并且忽略其空气阻力以及滚动摩擦力[10]。简化制动模型,将制动力矩转化为定值,等效为道路对车轮的滑动摩擦力。车辆的纵向运动的模型如图2所示。

图2 车辆的纵向运动模型
汽车在纵向制动的表达式为
(1)
前、后车轮绕各自车轴运动表达式为
(2)
汽车前、后轮的地面制动力
(3)
式中:m——半车总质量,kg;
u——汽车速度,m/s;
wf、wr——前、后车轮转速;
Fxf、Fxr——前、后车轮地面制动力,N;
Iwf、Iwr——前、后车轮转动惯量,kg·m2;
Fzf、Fzr——前、后车轮胎地面支持力,N;
Tf、Tr——作用在前、后车轮的制动力矩,N·m;
μf、μr——前、后轮胎路面附着系数。
因为悬架的垂直位移以及轮胎的地面不平度可忽略不计,因此
(4)
根据牛顿第二定律,建立车身垂向运动微分方程
(5)
车身俯仰运动的微分方程
(6)
式中:Fsf、Fsr——前、后悬架定刚度力Ksf(zsf-zwf)、Ksr(zsr-zwr),N;
Fcf、Fcr——前、后悬架定阻尼力
Ksf、Ksr——前、后悬架刚度系数,N/m;
Csf、Csr——前、后悬架阻尼系数,Ns/m。
当俯仰角较小时,前、后空气悬架的动态垂直位移
(7)
以前、后非悬挂质量为对象,由垂直方向力的平衡得
(8)
定义状态变量
x=[x1,x2,x3,x4,x5,x6,x7,x8]
则可将其写成如下形式
(9)
由于ms因车辆重量或人员的变化而变化,从而导致Isy也变化,因此ms和Isy为不确定的参数,对于半车空气弹簧半主动悬架系统公式,假设系统中不确定参数ms和Isy存在已知上下界,即满足
(10)
为了满足空气悬架系统具有足够的动态性能和安全约束,确定空气悬架系统以车辆的驾驶平顺性以及安全约束性能为控制目标。
2 自适应反推控制的设计及优化
通过反步递推和Lyapunov稳定性理论设计自适应反步递推控制器,并对控制器参数进行粒子群算法寻优。所设计的控制器可以在处理不确定的参数和外部干扰时,确保悬架系统的垂直和俯仰运动的渐进稳定性,并且满足安全约束性能。本文设计了两个控制器,第一个控制器基于BLF方法,第二个控制器基于QLF方法,并进行了对比仿真。
2.1 基于BLF的控制器设计
在文献[11]中,介绍了对基于BLF自适应反步递推控制器的设计过程。对于闭环系统而言,定义跟踪误差e1=x1-x1d,e2=x2-x2d,e3=x3-x3d,e4=x4-x4d,其中x1d、x3d为参考轨迹,x2d、x4d为设计的虚拟控制函数。
1) 基于BLF的控制器的初始条件,考虑半正定Lyapunov候选函数
(11)
为了使误差e1、e2在预定时间内收敛为零,则设计合适的虚拟控制函数x2d、x4d如式(12)所示。
(12)
则V1(e1)、V3(e3)的导数
(13)
显然当e2=e4=0时,
选择半正定Lyapunov候选函数
(14)
式中:
估计值
与真实值θ1、θ2的 误差,且θ1=1/ms、θ2=1/Isy。
(15)
式中:r1——正常数。
τ1=Ff+Fr-Fsf-Fsr-Fcf-Fcr

(16)
式中:r2——正常数。
τ2=a(Fsf+Fcf)-b(Fsr+Fcr)-aFf+bFr+msghφ+Mp
为了实现垂直和俯仰角加速度的渐近稳定性,自适应反步递推控制输出律
(17)
式中:m1、m2、k1、k2、k3、k4——正常数。
因此,
由此可得前、后轮的空气弹簧可变力Ff、Fr,实现对悬架系统的控制。
2) 对悬架系统进行零动态稳定性分析,因为实际的系统为八阶,所以零动态由四个状态组成。令x1=0,x3=0,即
(18)
将式(18)代入式(9)得零动力学方程
(19)
其中,x=[x5x6x7x8]T
q=[qfqr]T
对应的系数矩阵分别为
由于矩阵A、B、C满足赫尔维茨准则,因此零动态系统是稳定的存在。
2.2 基于QLF的控制器设计
本节中QLF使用的表达式和符号与基于BLF的控制器设计中所述的定义相同[13]。因此,定义跟踪误差e1=x1-x1d,e2=x2-x2d,e3=x3-x3d,e4=x4-x4d,则虚拟控制函数x2d、x4d如式(20)所示。
(20)
则V1(e1)、V3(e3)的导数
(21)
显然当e2=e4=0时,
的投影算子和上文投影算子相同。
因此,自适应反步递推控制输出律
(22)
显然,此时
零动态稳定性分析同BLF相同。
2.3 粒子群算法设计
当汽车进行直线非紧急制动时,其主要目标为降低车辆的俯仰角保证其姿态,其次降低车辆的车身垂向加速度、俯仰角加速度保证车辆的平顺性,因此对空气悬架系统进行参数优化,其适应度函数
(23)
式中:Ffy、Ffy0——有无控制车身俯仰角均方根值;
Fczj、Fczj0——有无控制车身垂向加速度均方根值;
Ffyj、Ffyj0——有无控制车身俯仰角加速度均方根值;
Fqdn、Fqdn0——有无控制前悬架动挠度均方根值;
Fhdn、Fhdn0——有无控制后悬架动挠度均方根值。
粒子群算法的参数如表1所示。

表1 粒子群算法参数
2.4 路面及初始条件的设定
2.4.1 随机路面
路面激励通常是由随机振动模拟,国标中关于车辆振动路面输入给出了具体的参考标准[14]。
因此,随机路面输入
(24)
式中:u——车辆行驶速度,m/s;
f0——空间下截止频率,Hz;
w(t)——高斯白噪声,dB。
针对建立的半车悬架模型,需要对前、后轮进行路面仿真,仅需考虑前、后轮经过同一路面的时滞性。选取B级路面,路面不平度系数Gq(n0)=6.4×10-5m3,汽车行驶速度为u=30 m/s,车辆减加速度设定为3 m/s2,系统仿真时间设定为5 s。
2.4.2 颠簸路面
通过凸块信号作为路面干扰输入对空气悬架系统进行稳定性测试。凸块信号
(25)
式中:h——道路高度,0.05 m。
汽车行驶初速度为u=30 m/s,对前轮进行L/u延迟即为后轮路面。
2.4.3 初始条件设定
考虑具有不同初始值的两种条件。
条件1:设定初值x1(0)=0 m,x3(0)=0 rad,θ1(0)=1/350,θ3(0)=1/1 000。参考轨迹设置为x1d=0,x3d=0。
条件2:设定初值x1(0)=0.06 m,x3(0)=0.06 rad,θ1(0)=1/350,θ3(0)=1/1 000。参考轨迹为一个衰减的多项式,使车身的垂向运动在Td时间内达到稳定,从而提高车辆平顺性。具体设计如下
(26)
式中:Td——预设时间,2 s;
a0、a1、a2、a3、a4——参考轨迹公式系数,分别为0.06、0、-0.09、0.06、-0.001 125。
3 仿真与优化结果分析
为了验证所提出的基于粒子群算法的自适应反步递推控制策略的效果,对悬架系统进行了基于MATLAB/Simulink的仿真分析。半车空气悬架系统参数如表2所示。

表2 半车空气悬架系统参数
在悬架系统受到外界干扰时,调节k1、k2等参数增益能更好地使悬架系统快速收敛,使得车辆垂直加速度和车身俯仰角加速度趋于零。为此,使用粒子群算法对参数增益进行优化调节,使得在不同路面情况下,控制器具有良好的控制效果。
3.1 控制器参数优化结果
设KBLF=[k1,k2,k3,k4,m1,m3,r1,r2],KQLF=[k1,k2,k3,k4,r1,r2],其优化结果如表3所示。

表3 半车空气悬架系统参数
3.2 条件1下的随机路面仿真结果分析
图3为条件1下的车身俯仰角对比,图4为条件1下的车身垂向加速度和俯仰角加速度对比。与无控制悬架系统相比,可以看出两种控制器都能明显提高车身俯仰角、车身垂向加速度和俯仰角加速度,并且实现车身的快速稳定。同时可以看出条件1下,两种控制器具有几乎相同的控制效果,这意味着两种控制器在零初始条件下具有相同的保守性。
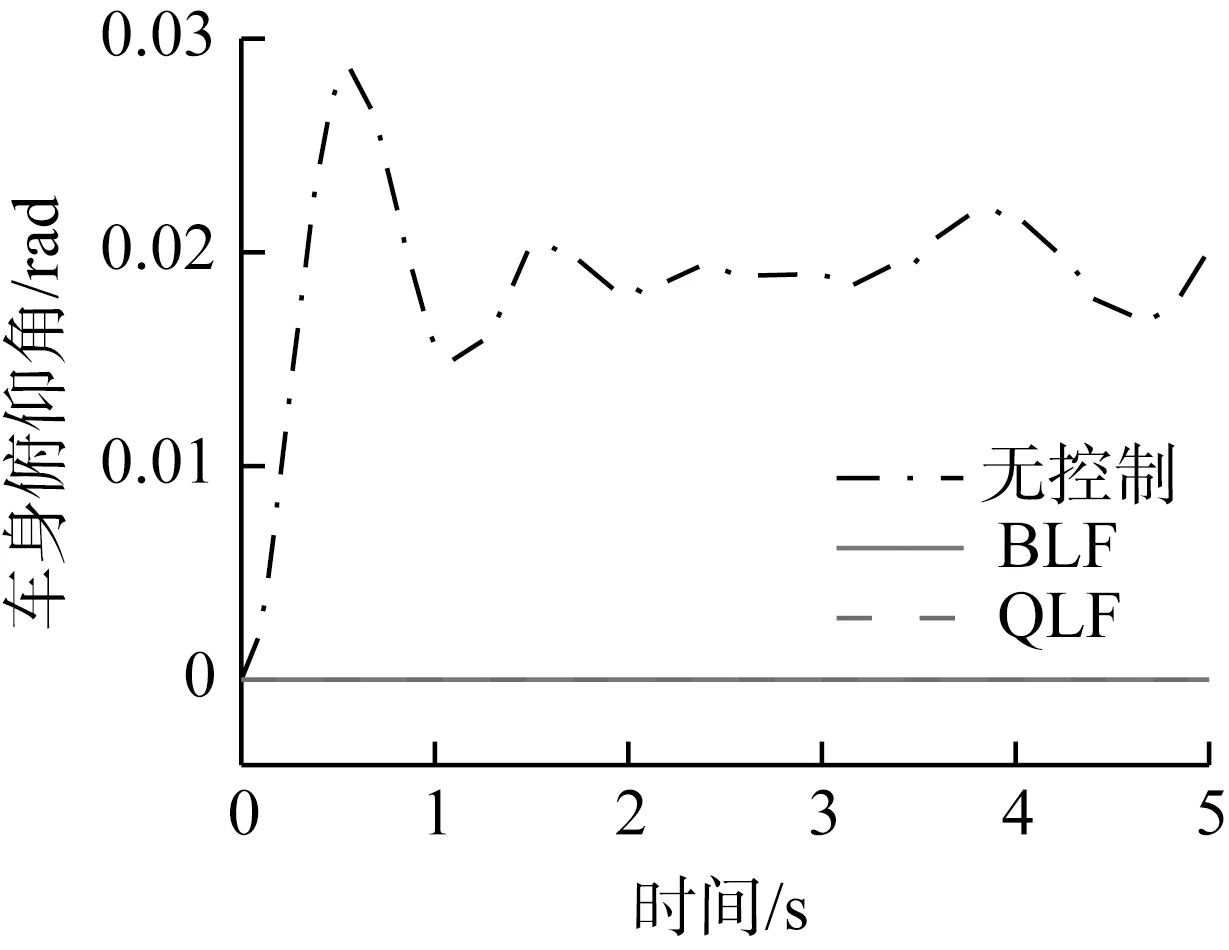
图3 车身俯仰角对比

(a) 车身垂向加速度对比
3.3 条件2下的随机路面仿真结果分析
图5为条件2下的车身垂向位移和俯仰角的对比,图6为条件2下的车身垂向加速度和俯仰角加速度对比。从图中得出,对轨迹曲线的跟踪两种控制器都具有良好的效果。并且表4所示,面对外部输入干扰都显著地改善了悬架系统的垂向加速度和俯仰角加速度,垂向加速度均方根值相对无控制分别改善了97.78%和98.31%,俯仰角加速度均方根值相对无控制分别改善了96.72%和97.82%。在垂向加速度方面,两种控制器控制效果几乎相当;在俯仰角加速度方面,明显QLF具有比BLF更快的收敛速度,更小的峰值。总的来说,QLF控制器结果比BLF控制器更好。
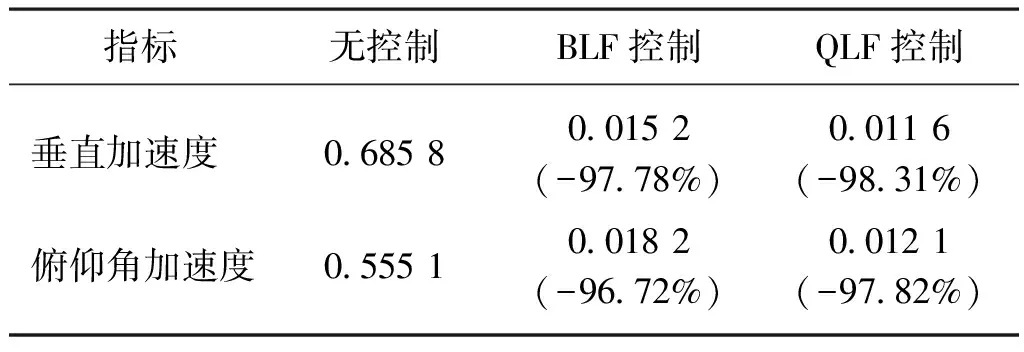
表4 车身垂向加速度和俯仰角加速度均方根对比
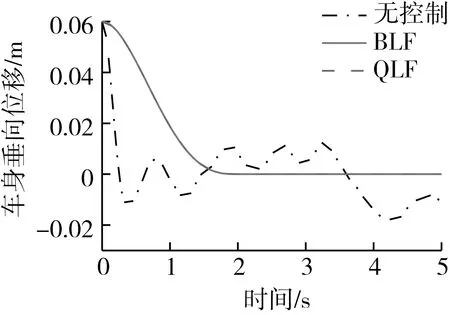
(a) 车身垂向位移对比
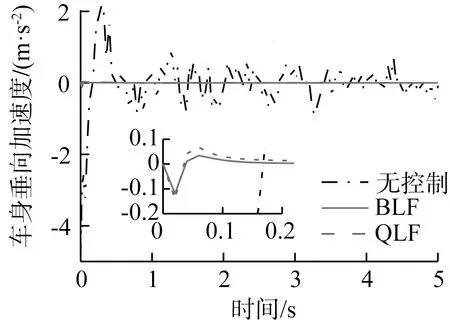
(a) 车身垂向加速度对比
3.4 条件1下的颠簸路面仿真结果分析
图7为条件1下的车身俯仰角对比,图8为条件1下的车身垂向加速度和俯仰角加速度对比,两种控制器均能使悬架系统的俯仰角、车身垂向加速度和俯仰角加速度在更短的时间内收敛到稳定的状态并且满足设定的安全约束条件。

图7 车身俯仰角对比
(a) 车身垂向加速度对比
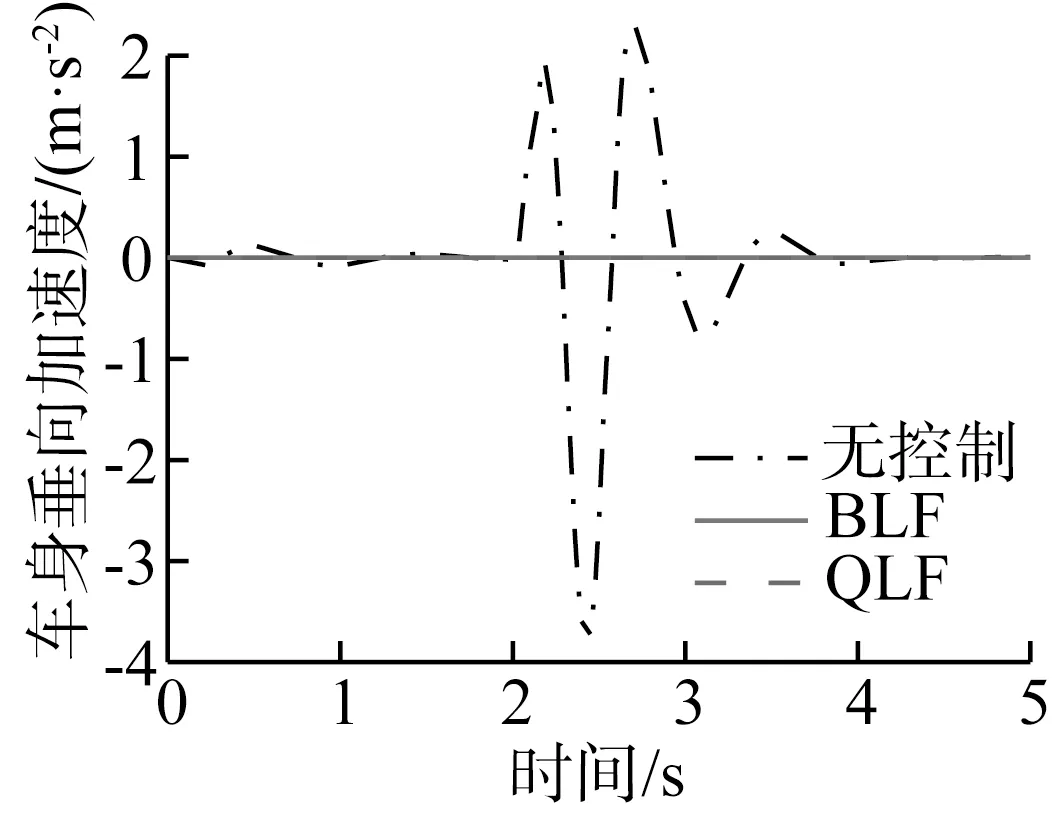
3.5 条件2下的颠簸路面仿真结果分析
图9为条件2下的车身垂向位移和俯仰角的对比,图10为条件2下的车身垂向加速度和俯仰角加速度对比。显然,两种控制器对于轨迹曲线都具有良好的跟踪保持效果,并且表5所示,面对外部输入干扰都显著地改善了悬架系统的垂直加速度和俯仰角加速度,垂向加速度均方根值比较无控制分别改善了97.53%和97.93%,俯仰角加速度均方根值较无控制分别改善了93.83%和95.89%。而且相较于BLF控制器,QLF控制器收敛速度更快,垂直加速度和俯仰角加速度峰值更低,控制效果更好。
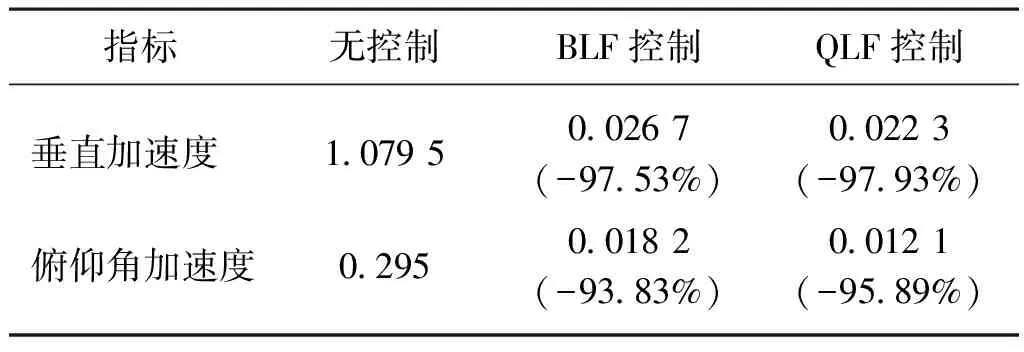
表5 车身垂向加速度和俯仰角加速度均方根对比
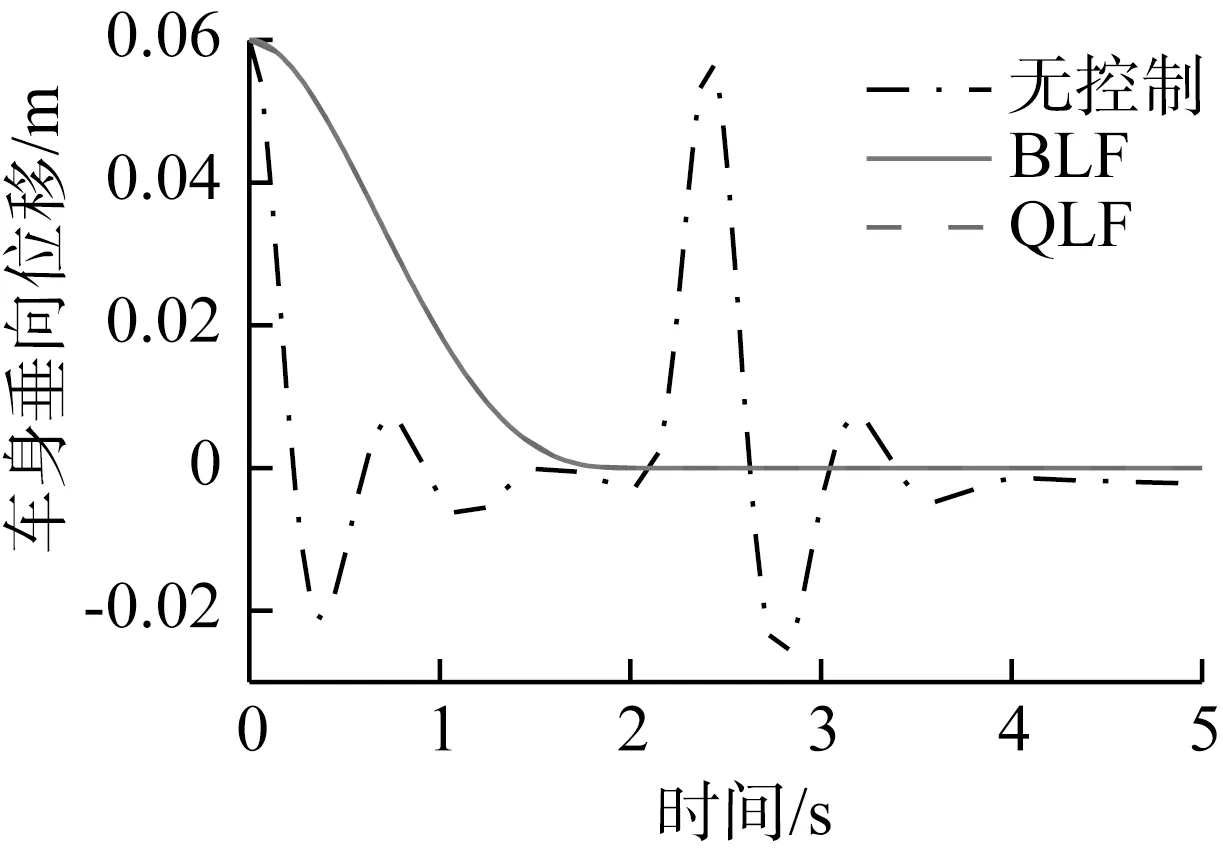
(a) 车身垂向位移对比
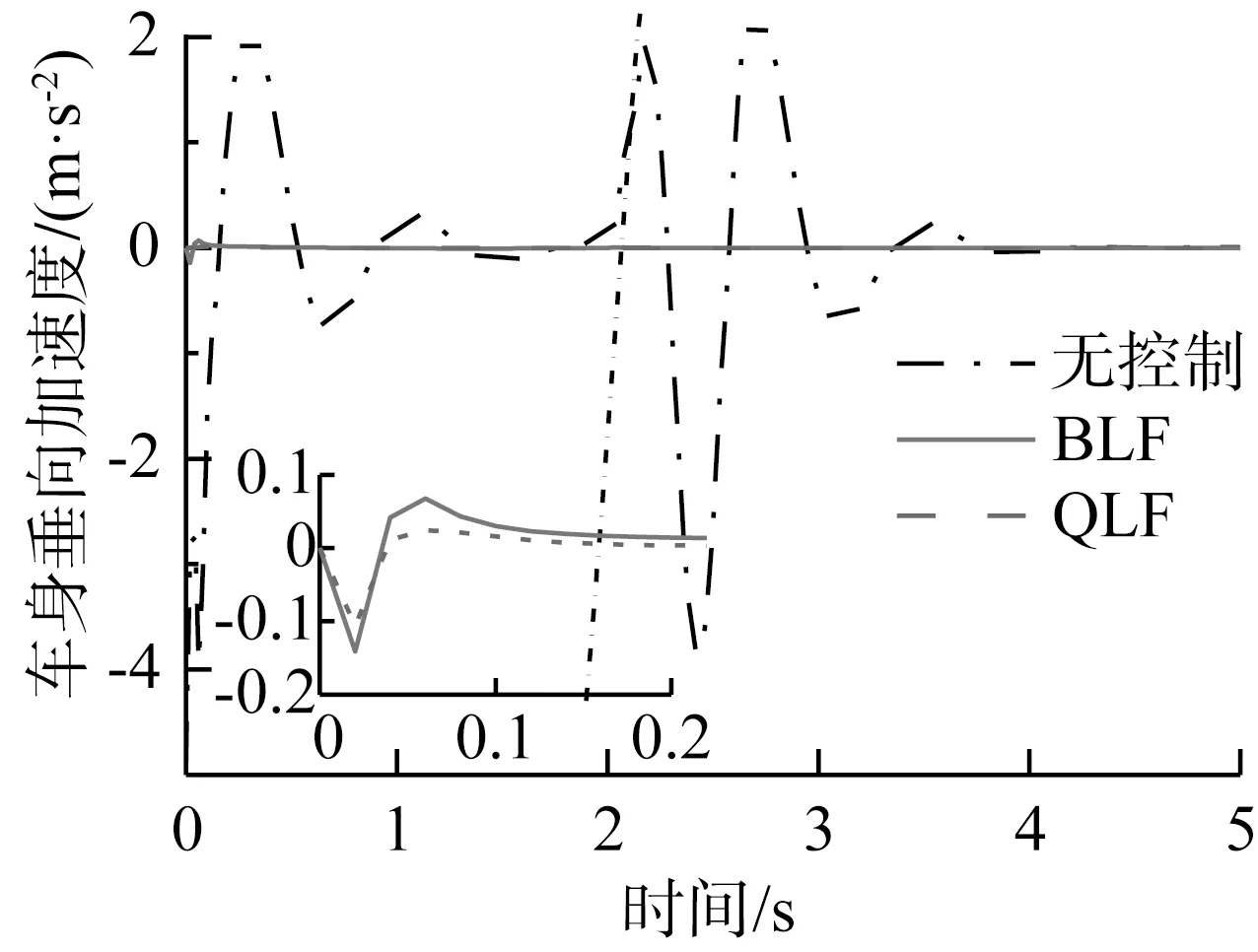
(a) 车身垂向加速度对比
4 结论
1) 本文建立了1/2车空气悬架模型,研究了在非紧急制动工况下的半主动空气悬架的车辆平顺性,提出了BLF和QLF两种方法的自适应反步递推控制器,在保证系统安全的前提下,利用粒子群算法优化增益参数,在 MATLAB/Simulink中进行了两种不同路面条件下的仿真分析。
2) 仿真结果表明,在零初始条件下两种控制器都能极大的改善俯仰角、垂向加速度和俯仰角加速度。在随机路面非零初始条件下,QLF比BLF具有更小的增益值,车身垂直加速度均方根值分别改善了98.31%和97.78%,车身俯仰角加速度均方根值分别改善了97.82%和96.72%;在颠簸路面非零初始条件下,QLF与BLF控制器对车身垂直加速度均方根值分别改善了97.93%和97.53%,车身俯仰角加速度均方根值分别改善了95.89%和93.83%。综上所述,QLF控制器在低增益下具有很好的跟踪效果,悬架性能改善更优,车辆平顺性明显提升。
3) 由于悬架的控制力是一个频繁变化的曲线,但是空气弹簧频繁的充放气,会带来一定安全问题,就空气弹簧与驾驶平顺性的综合考虑是以后需要研究的问题。
猜你喜欢
世界汽车(2022年11期)2023-01-17
机械设计与制造(2022年5期)2022-05-19
汽车零部件(2019年10期)2019-11-13
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
汽车维护与修理(2014年10期)2014-02-28
机械与电子(2014年2期)2014-02-28