基于计算流体动力学方法的两栖飞机规则波中运动特性研究
2024-01-15 05:57胡开业石林飞周辉毛丽君
哈尔滨工程大学学报 2024年1期
胡开业, 石林飞, 周辉, 毛丽君
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
水陆两栖飞机具备独特的环境适用性能,可在水面和陆上实现起降,广泛应用于消防、海上救援、运输、巡查、旅游开发等领域,弥补了救援直升机及船舶航速慢、航程短、载量小等方面的不足。目前部分国家研发设计了具备优秀性能的水陆两栖飞机,如俄罗斯别利耶夫设计局研发的高航速水上飞机Be-200,日本新明和公司研发的US-2水上飞机,以及加拿大福恩公司、三叉戟公司研发的CL-215和CL-415型水上飞机[1-2]。近年来我国研制的AG600水陆两栖飞机,代表我国水陆两栖飞机自主设计制造能力跻身世界先进水平。
水陆两栖飞机的深V型船底结构与断阶滑行艇相似,李晓文等[3-4]基于Star-CCM+软件对滑行艇水面直航进行数值模拟,验证了该平台在研究滑行艇波浪中运动水动力性能时具有一定可行性和准确性。黄淼等[5-7]对水陆两栖飞机抗浪能力做了大量试验研究,分析船底结构及波浪要素对飞机滑行运动及机身载荷的影响,得到了模型在波浪上运动响应曲线随遭遇频次、波浪、速度的变化规律,以及飞机在波浪水面发生剧烈运动响应时对应的波浪范围。蒋荣等[8]采用船舶耐波性分析中常用的层次分析法对水上飞机的抗浪性能进行了评估。Chambliss等[9]研究了V型剖面斜升角对运动性能的影响。段旭鹏等[10]则提出了一种基于OpenFoam开源平台的水面飞行器波浪中数值模拟技术。对于水陆两栖飞机着水性能的研究,往往是基于数值计算方法模拟初始条件以及波浪因素对水陆两栖飞机着水性能的影响[11-15]。水陆两栖飞机在水上滑行起降时,飞机升沉、俯仰、尾流现象、喷溅特性、起降距离和机身底部压力变化特性,以及数值模拟技术对于处理水陆两栖飞机波浪中运动问题的适应性,也是以往研究的热点之一[16-19]。
水陆两栖飞机波浪中加速航行时纵摇和升沉的耦合运动具有强非线性,受到波浪因素和速度影响较大,导致高海况非定常运动全过程运动的研究难度大。本文基于Star-CCM+平台对水陆两栖飞机波浪中滑行起飞过程进行数值仿真,以波长和波高为变量,探讨加速滑行过程中飞机升沉、纵摇运动响应以及机身重心处垂向加速度幅值
1 数值计算模型
1.1 计算模型
本文研究对象为某型水陆两栖飞机,该飞机具有V型船身结构、大展弦比悬臂上单翼、抑波槽以及船底中部的断阶结构,数值计算几何模型按1∶ 8.5倍等比例缩小,尺寸如表1所示。水陆两栖飞机在波浪中滑行时受到水动升力、水动阻力、气动升力、气动阻力、浮力、重力、以及发动机推力共同作用,航行稳定性影响因素多,数值计算中模型为节省网格和提高计算效率,省略螺旋桨结构,几何模型如图1所示。
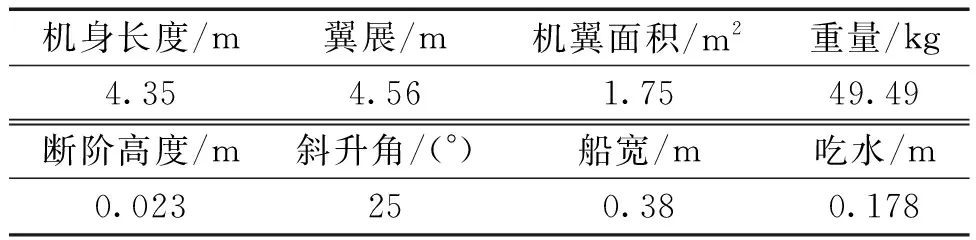
表1 模型飞机主要参数Table 1 Main parameters of model aircraft
1.2 数学模型
流体流动满足质量守恒、动量守恒和能量守恒三大基本守恒定律,引入湍流模型求解RAND方程具备较好的湍流中物体高速运动模拟精度,本文选取SSTk-ω模型,应用有限体积法划分计算域控制体,SIMPLE算法求解速度和压力的离散方程,对流项采用二阶迎风格式,应用壁面函数法求解近壁面流场,流体域体积方法捕捉水气两相流自由交界面。
质量守恒方程又称连续性方程,若速度得3个方向分量表示为uνw,则有不可压缩流体满足:
(1)
流体域体积模型是建立在欧拉网格下的表面跟踪方法,广泛适用于不相容的多项流交界面捕捉,适用于研究具有喷溅现象发生的强非线性问题。在STAR-CCM+中采用流体域体积多相模型来捕捉流体交界面,并可预报不相容相交界面的分布和移动。不相容相的位置和分布由各个相的体积分数q来描述。相1的体积分数定义为:
q1=V1/V
(2)
式中:q1为相1的体积分数;V1为网格单元中相1的体积;V为网格单元的体积。
一个网格单元所包含的所有相的体积分数的总和一定为1。
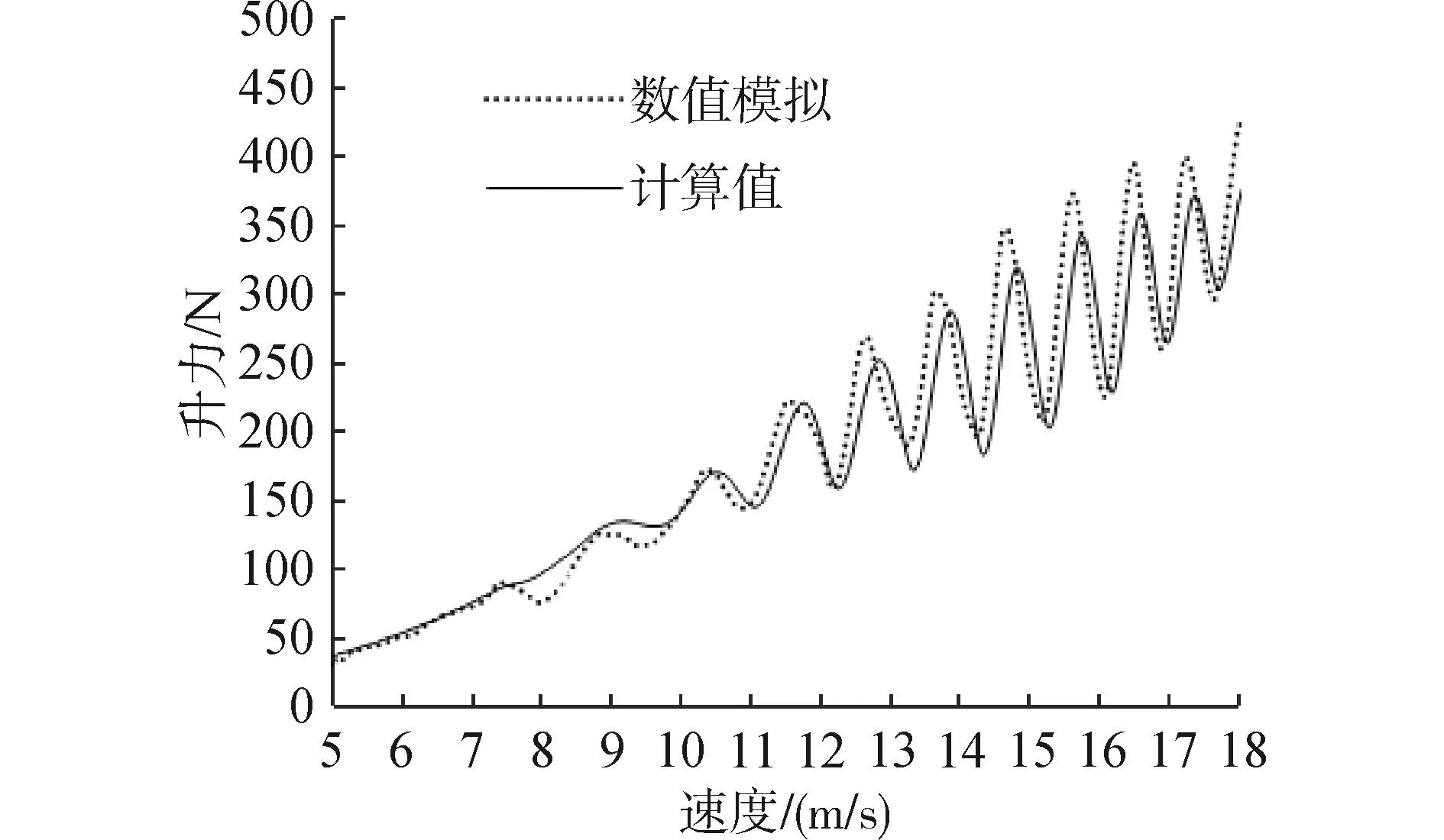
针对本文采用的水相和空气相组成的多相流,若水相为相1,则当q1=1时,表示此网格单元内只有水相;当q1=0时,表示此网格单元内只有空气相;当0 本文数值模拟涉及水陆两栖飞机滑行起飞过程中的升沉和纵摇运动,Star-CCM+平台提供动态流体相互作用模块(DFBI)可对飞机3个自由度运动进行模拟[20]。如图2所示,因本文需要模拟两栖飞机迎浪起降过程,故流体域设置速度入口距离飞机中心长度64 m,压力出口距离飞机中心16 m,消波方法采用阻尼消波,阻尼消波区不小于一个波长。计算域顶部距离液面6 m,底部距离液面8 m,两侧距离飞机中心6.5 m,边界条件均设置为速度入口。 图2 流体域边界示意Fig.2 Schematic diagram of fluid domain boundary 受航速和波浪影响,水陆两栖飞机纵摇和升沉运动运动变化剧烈,重叠网格可以巧妙解决飞机大倾角运动问题,其中重叠区域随刚体做大幅运动,而自由液面始终处于流体域网格加密区,自由液面捕捉精度较高。 计算域网格采用具有较高精度和计算效率的结构性网格,机体近壁面采用12层增长率为1.2的棱柱层网格,对机体周围及液面区做网格加密处理。计算域采用半模可一定程度减少网格数量,但无法精确计算船底龙骨线附近湍流压力变化,因此本文研究采用全模计算域,最终得到网格数量为1 578万,计算采用64核双路至强工作站,计算域网格划分方案如图3所示。 图3 流场网格划分方案Fig.3 Grid division scheme of flow field 由于流体粘性和网格因素的影响,长域规则波传递过程中出现波浪衰减现象[21-22],为模拟实际尺度海况,将数值水池域尺寸设置为1 500 m×200 m×200 m,使用边界造波法模拟数值规则波,压力出口处设置阻尼消波区,阻尼消波区长度为1.5倍波长,沿水池中纵剖面每间隔100 m设置了一个波浪监测点,自由液面波形监测点位置分布如图4所示。 图4 流体域网格及波形监测点位置分布Fig.4 The distribution of fluid domain grid and waveform monitoring points 设置数值波浪波长λ为74 m(约2倍实机长度),波高h分别为1.5 m,波陡为0.010 1。本文对水线面附近网格进行3层加密以减少传递过程中的波浪衰减,其中最里层加密区波高方向网格不小于20个,波长方向网格不小于80个,时间步长设置兼顾库朗数和波浪周期要求,库朗数值小于0.2,周期值不小于T/500[23],通过对比时间步长为0.002 5、0.002、0.001 5、0.001 s时波浪衰减情况,最终选择时间步长取值为0.002 s。取监测点6处数值模拟波高和周期如图5所示。 图5 监测点6处数值模拟波形与理论波形时历曲线对比Fig.5 Comparison of the time history curve of the numerical simulation waveform and the theoretical waveform at the monitoring position 6 根据统计对比结果得出,监测位置越靠近速度入口端,波浪数值模拟精度越高,各监测点模拟波高相对于理论波高误差在4.7%以内,模拟周期相对于理论周期误差在2.6%以内,该数值造波方法精度较高。 水陆两栖飞机在起降滑行过程中速度变化极快,计算精度受近壁面棱柱层厚度影响较大,本文设置棱柱层增长率为1.2,总层数为12层,壁面率y+分别取30、100、200、300生成4套不同的网格。设置规则波波高h=0.06 m,波长λ=8 m,模型航速v=5 m/s。得到水陆两栖飞机升沉、纵摇曲线与中试验数据对比如图6所示。各方案与试验偏差如表2所示。 图6 水陆两栖飞机升沉、纵摇曲线与试验数据对比Fig.6 Comparison of heave and pitch curves of amphibious aircraft with test data 表2 网格方案与试验对比及偏差Table 2 Comparison and deviation between grid scheme and experiment 由表2可得方案B飞机滑行过程纵摇和升沉与试验值偏差相对最小,符合工程实验要求,后续数值仿真实验中y+值取100,空气和水的运动粘度相差为10倍,该数值同样适用于机翼气动升力的y+取值范围。 飞机水上滑行过程运动状态可分为4个阶段,分别为排水航行阶段、过渡阶段、滑行阶段、起飞阶段[24]。取工况波长为10 m,波高为0.165 m,飞机初始2 s加速度值匀速增加到2 m/s2,然后以恒定加速度2 m/s2运动,给定来流速度为5 m/s,设置初始流场稳定时间10 s,采用前述CFD仿真方法,计算得到该工况水陆两栖飞机波浪中加速起飞过程运动时历曲线如图7所示。 图7 水陆两栖飞机波浪中滑行时历曲线Fig.7 Taxiing time history curve of amphibious aircraft in waves 由于数值模拟实验飞机襟翼、升降舵角度固定,以及受模型尺度和波浪因素影响,数值模拟过程起飞离水速度Vga为20 m/s左右。流场稳定时间内无刚体运动,飞机排水航行阶段(Vx≤0.25Vga,Vx表示飞机前进方向的速度)不被监测。过渡阶段(0.25Vga 研究波长对水陆两栖飞机滑行起飞过程运动状态的影响,根据机身长度和中国近海海域自然海况条件,选取波长范围为2~20 m,每隔2 m选取为一组,波高选取0.147、0.182 m。 本文研究飞机加速度恒定为2 m/s2,滑行起飞过程中升沉、纵摇运动时历曲线呈不稳定非周期性。图8、9给出了飞机升沉运动最值曲线和飞机纵摇运动最值曲线。由图8~9可得,随着波长增加,飞机升沉运动最大值、双幅值最大值先增加,在波长为10 m附近出现小幅峰值,而后变化缓慢趋于稳定。纵摇运动最大值、双幅值最大值呈现先增加后缓慢减小趋势,在波长为10 m附近出现峰值,纵摇最大值超过11°,双幅值最大值超过13°。图10、图11给出了水陆两栖飞机波浪上滑行起飞过程中垂向加速度和纵摇角加速度的最大值,随着波长增加,飞机重心处垂向加速度、纵摇角加速度呈现出先增大后缓慢减小趋势,在波长为8~10 m时出现峰值。由图12可知,飞机垂向加速度值超过垂向加速度g的工况波长超过机身长度,在波长为10 m附近频次最大。 图8 飞机升沉运动最值曲线Fig.8 Maximum curve of aircraft heave motion 图9 飞机纵摇运动最值曲线Fig.9 The curve of the maximum value of aircraft pitch motion 图10 飞机重心处垂向加速度最值Fig.10 The maximum vertical acceleration at the center of gravity of the aircraft 图11 纵摇角加速度最值Fig.11 Maximum pitch angular acceleration 图12 垂向加速度大于g频次分布Fig.12 Frequency distribution of vertical acceleration greater than g 由此可见,波长为2~3倍机身长度时,飞机波浪中加速起飞过程运动受波浪影响较大,对机身结构和机组人员安全不利,应尽量避免在波长为2~3倍机身长度海况中进行滑行起降工作。 研究波高对水陆两栖飞机滑行起飞过程运动状态的影响,根据机身长度和中国近海海域条件,选取波长为4、12 m,波高选取0.147、0.165、0.182、0.2、0.218、0.235 m。 水陆两栖飞机升沉运动最大值,随着波浪高度增加,12 m长波中飞机升沉最大值增加,在波高为0.182~0.218 m区间涨幅最大,而短波中飞机升沉运动最大值随波高增加缓慢,如图13所示。飞机纵摇运动最大值随着波高增加而增加,如图14所示,波长为12 m的波浪波陡较小,单个波浪周期内飞机有较长加速距离,所以同一波高内长波中飞机升沉、纵摇运动最大值较短波中更大。飞机重心垂向加速度最大值集中在高速滑行阶段,长波中飞机跃出波峰时具有更大的垂向速度,随波高增大垂向速度增大,故飞机升沉幅值随波高增加而增加,船身接水时受到水动升力更大,重心垂向加速度更大,如图15所示,重心垂向加速度超过重力加速度g的频次随着波高增大而增大。 图13 飞机升沉运动最值曲线Fig.13 The maximum value curve of aircraft heave motion 图14 飞机纵摇运动最值曲线Fig.14 The curve of the maximum value of aircraft pitch motion 图15 飞机重心垂向加速度曲线Fig.15 Vertical acceleration curve of the aircraft′s center of gravity 由此可见。随着波浪高度增加,飞机滑行起飞过程稳定性下降,升沉、纵摇运动响应加剧,对飞机结构和机组人员安全影响不利。 取工况波长为2 m,波高为0.147 m,得到数值模拟主翼气动升力随速度变化曲线,图16给出机翼升力系数C随机翼攻角变化曲线,代入气动升力计算公式得到理论机翼升力变化曲线。气动升力计算公式为: 图16 飞机机翼升力系数曲线Fig.16 The lift coefficient curve of the aircraft wing Y=ρCSv2/2 式中:ρ为空气密度;C为升力系数;S为机翼面积;ν为飞机速度。 由于波浪中机翼随着机体做俯仰、升沉运动,升力数值模拟曲线为上升波浪线,由图17观察到,理论计算得到的机翼升力曲线与数值模拟值一致,最大偏差小于10%,同时验证了本文数值计算结果的准确度较高,本文研究的数值模拟方案可用于水陆两栖飞机波浪中加速起飞过程机翼气动特性计算。 图17 飞机气动升力速度曲线Fig.17 Aerodynamic lift speed curve of aircraft 1)随着波长增大,飞机升沉运动最大值、最大双幅值随之增大,在波长为2~3倍机身长度时出现小幅峰值,随后缓慢变化,在波长为2~3倍机身长度时,飞机纵摇最大值和双幅值出现峰值,随后缓慢减小。飞机重心处垂向加速度、纵摇角加速度变化规律与纵摇运动一致,均在在波长为2~3倍机身长度时出现峰值,且垂向加速度超过g的频次在该工况附近较大。 2)随着波高增大,飞机升沉、纵摇运动及重心垂向加速度最大值随之增大,且长波中的变化值较短波中更大。 3)机翼气动升力数值模拟结果与理论计算值一致,同时验证了本文方案的可行性,本文数值模拟方案可用于水陆两栖飞机波浪中加速起飞过程机翼气动力特性研究。1.3 流体域边界条件

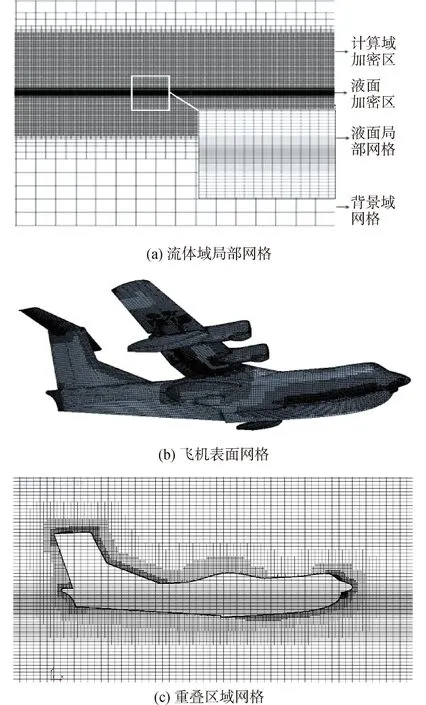
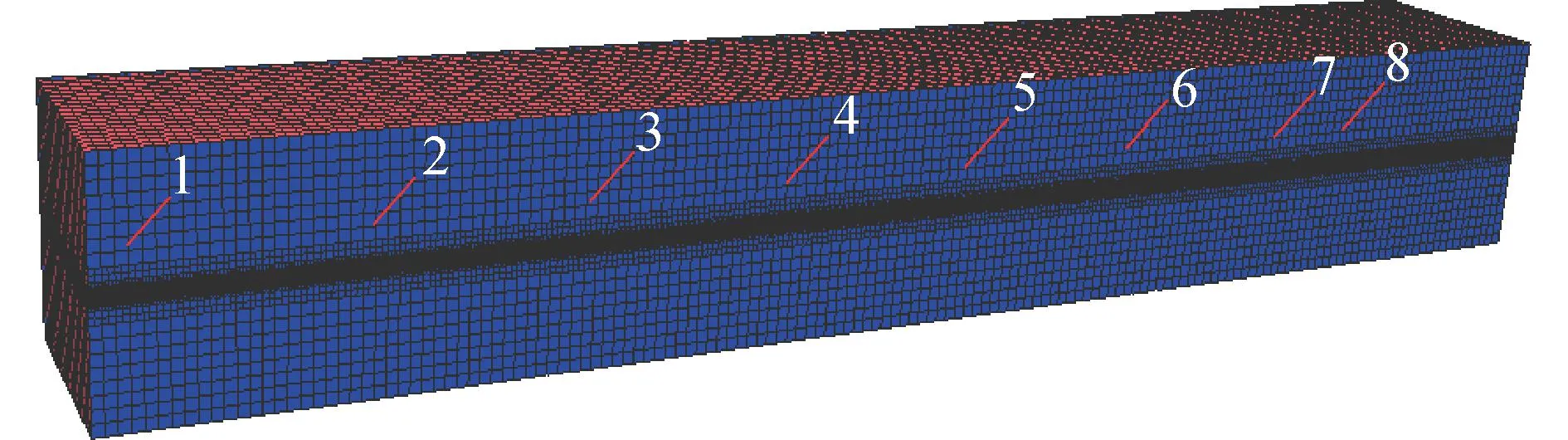
1.4 网格划分
2 数值计算验证
2.1 数值造波

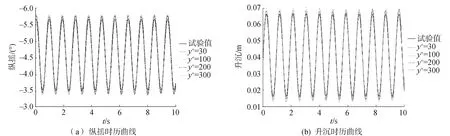
2.2 网格无关性验证

3 数值计算分析
3.1 加速滑行起飞过程运动状态分析

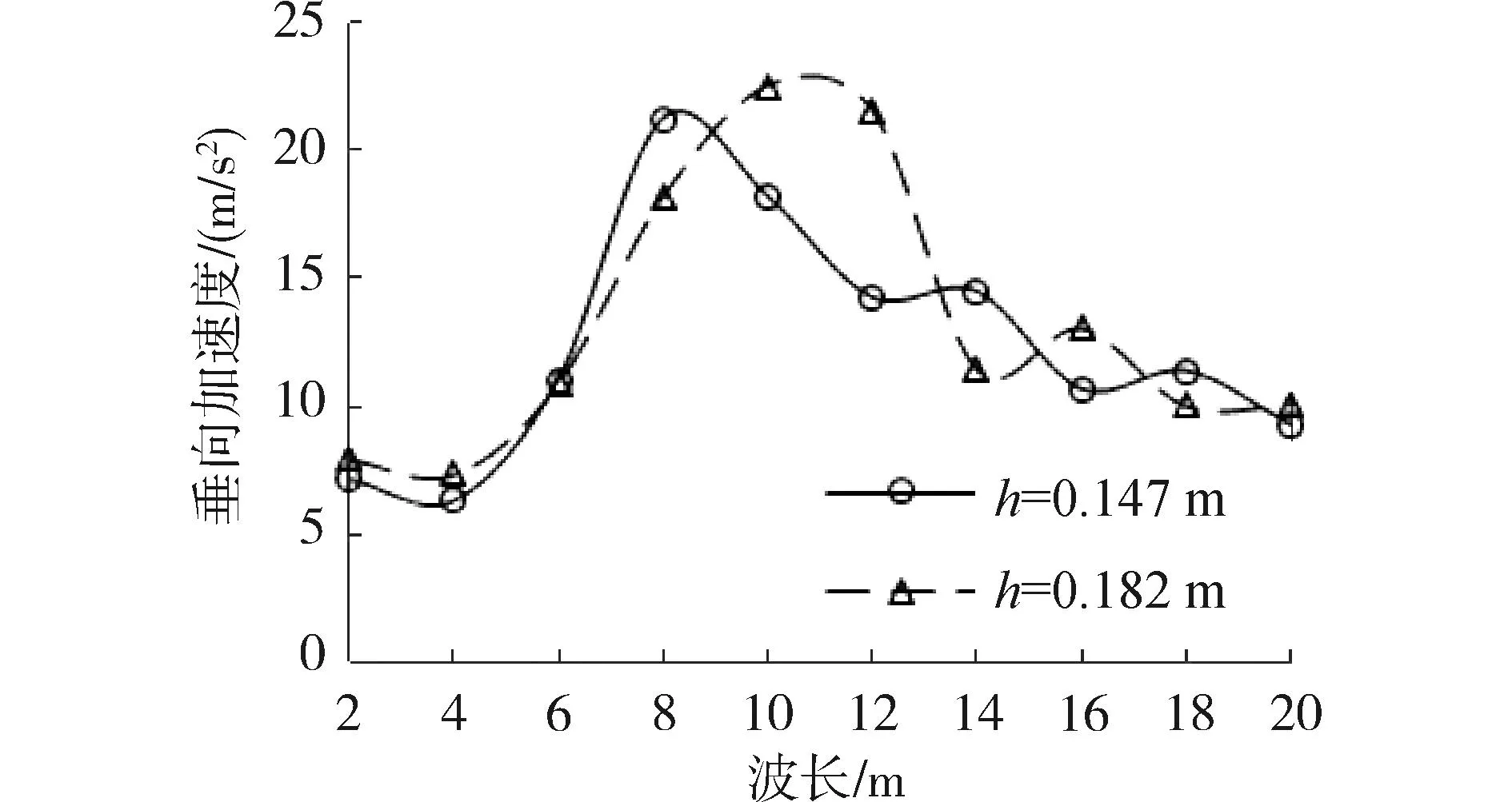
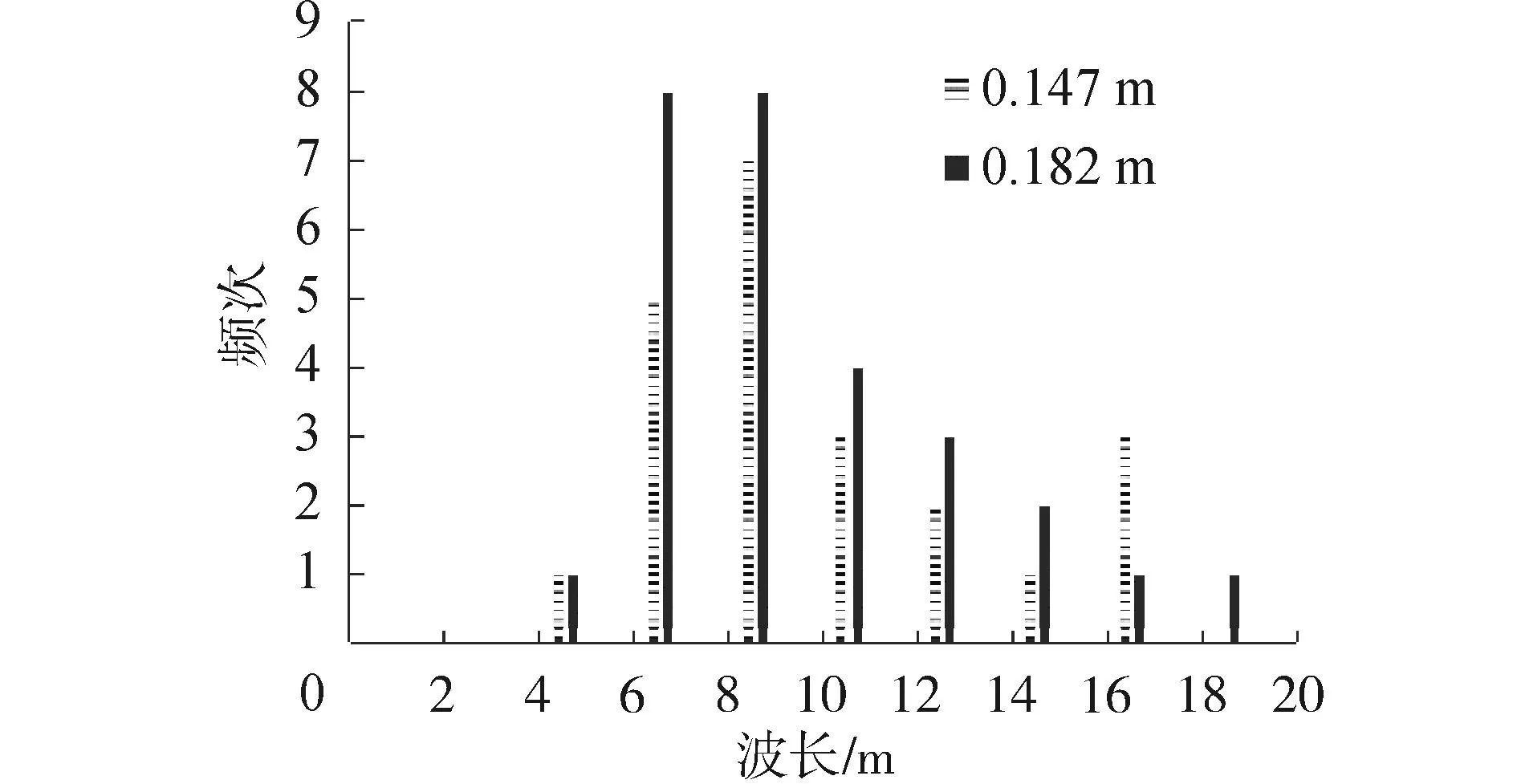
3.2 波长对飞机滑行起飞过程运动特性的影响



3.3 波高对飞机滑行起飞过程运动特性的影响



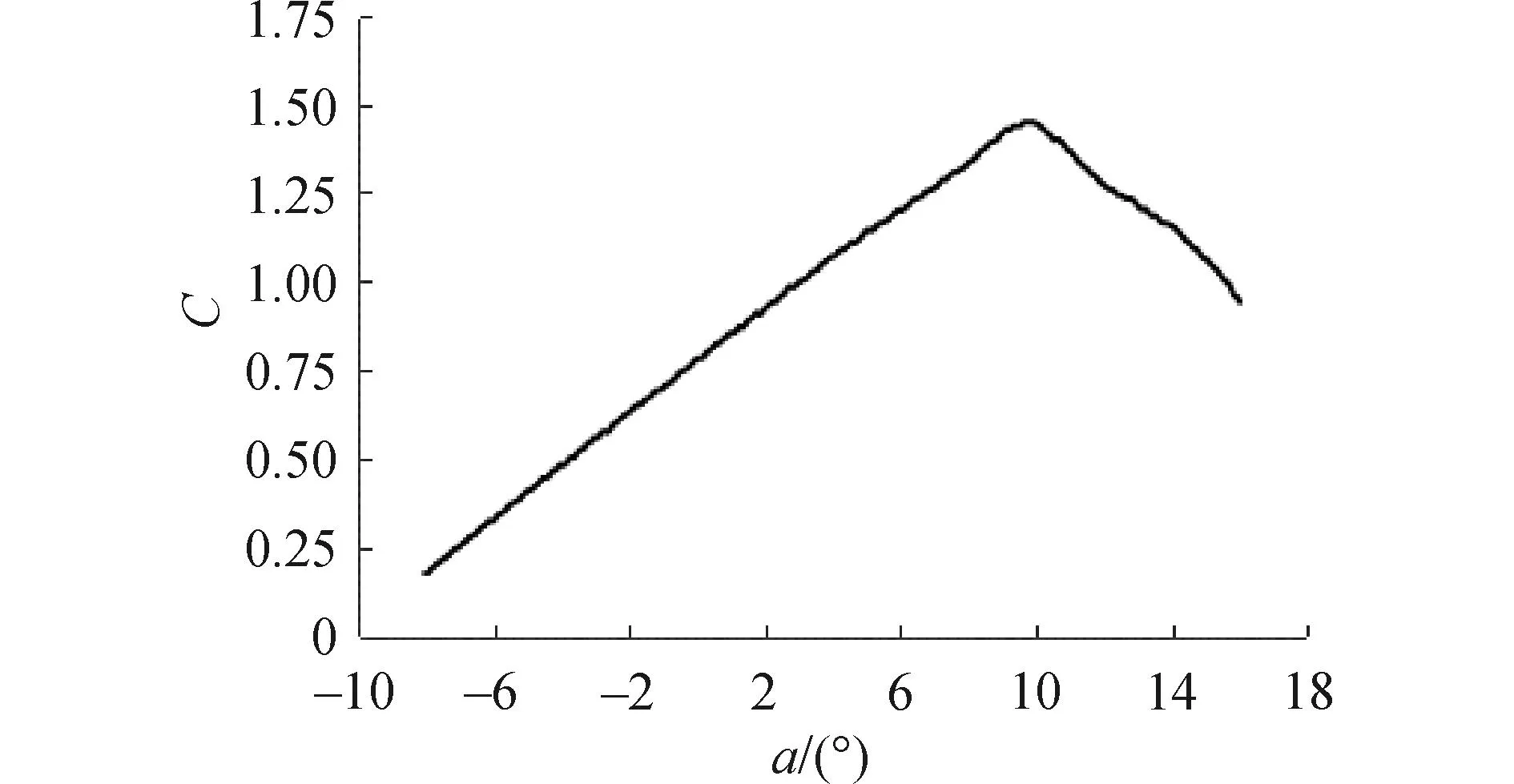
3.4 机翼气动升力计算分析
4 结论
猜你喜欢
实验流体力学(2023年1期)2023-03-21学苑创造·A版(2022年4期)2022-06-18国画家(2021年4期)2021-10-13装备制造技术(2020年1期)2020-12-25空间科学学报(2020年4期)2020-04-22当代陕西(2020年24期)2020-02-01小哥白尼(趣味科学)(2018年12期)2018-12-18青少年科技博览(中学版)(2017年1期)2017-03-02北京航空航天大学学报(2016年3期)2016-02-27现代企业(2015年6期)2015-02-28