动态事件触发机制下的无人艇无模型控制
2024-01-15 05:55张磊郑宇鑫黄兵苏玉民
哈尔滨工程大学学报 2024年1期
张磊, 郑宇鑫, 黄兵, 苏玉民
(哈尔滨工程大学 水下智能机器人技术国防科技重点实验室,黑龙江 哈尔滨 150001)
无人艇(unmanned surface vessel, USV)作为一种具有自主能力的水面机动智能平台,在军事和民用方面都具有广泛且重要的作用,例如水文地理勘察、海洋搜索以及多种战争和非战争军事任务等[1-3]。轨迹跟踪控制作为USV完成各项任务的重要保障,引起了各国众多学者的关注[4]。然而在实际应用中,海洋环境的复杂性和动力学系统的强耦合非线性使得USV轨迹跟踪控制器的设计极具挑战性。尽管存在这些挑战,研究人员仍对此做出了大量努力,提出了滑模变结构控制[5]、反步法控制[6]、容错控制[7]、预设性能控制[8]和模糊控制[9]等。在实际工程应用中,上述控制方法有一个共同的缺点就是需要精确的USV模型参数。但在缺乏精确测量仪器的情况下,很难准确获得USV的模型参数。为了提高在不确定动态下的控制性能,基于具有普适逼近特性的神经网络的控制算法得到了广泛研究[10],并在参数辨识过程中,通过使用最小参数学习法将神经节点权值矩阵压缩为权值矩阵的范数,有效地降低计算复杂度[11]。虽然上述方法一定程度上改善了USV控制系统的瞬态和稳态性能,但这些方法仍然直接或间接的需要部分模型参数。为了更好地保持系统的鲁棒性,需要进一步研究在不需要模型参数情况下的USV轨迹跟踪控制器。
USV在实际航行过程中,控制信号通常是通过时间采样的方式进行更新的。在这种通信方式下,为了保证系统的稳定性和有效性,一般设置很小的采样周期,然而,采样频率过高会导致控制器频繁更新,从而造成执行机构损耗及能源浪费等问题,并且大多数情况下,当系统趋于稳定后,已不需要频繁的数据更新来维持系统的性能。针对上述问题,事件触发机制[12]被提出,是一种用于采样和更新采样间隔的控制策略,即仅当事件触发控制中预定义的事件为真时才进行数据更新及传输[13-14]。值得注意的是,事件触发控制的设计要求消除Zeno现象,否则会使相应的控制行为无法执行,甚至导致系统不稳定[15]。注意到上述工作所涉及的事件触发控制策略都是在静态事件触发条件下得到的。这种设计下,当静态触发条件不易满足时可以有效地降低通信成本,但是随着时间的推移,由于阈值越来越小,事件会频繁触发,从而导致不必要的触发瞬间。因此,需开发更灵活的事件触发条件,以进一步降低控制器的信号更新频率。
受上述论文讨论的启发,本文研究了基于动态事件触发的USV无模型轨迹跟踪控制。首先,基于滑模控制和自适应控制算法提出了一种无模型参数的控制策略,大大提高了系统的鲁棒性。然后设计了一种动态事件触发机制,避免了频繁的控制器信号更新,显著降低了计算成本、执行机构损耗和能源消耗。随后通过李雅普诺夫稳定性分析证明了闭环系统的所有误差信号都可以收敛到一个残差集,且不存在Zeno现象。最后,通过数值仿真实验验证了所提出控制器的有效性和鲁棒性。
1 USV模型
只考虑USV水平面运动,其运动学和动力学模型可简化为[16]:
(1)
式中:η=[xyφ]T表示USV的位置向量,包含位置[xy]T和艏向φ;v=[uvr]T表示USV的速度向量,包含前进速度u、横漂速度v和艏摇角速度r;τ=[τuτvτr]T表示USV的推力及力矩向量;τb=[τbuτbvτbr]T表示USV外界干扰向量;J(φ)、M、C(v)、D(v)分别表示惯性坐标系和随体坐标系间的转换矩阵、质量惯性矩阵、科里奥利向心矩阵和水动力阻尼矩阵,其具体表达式为:
(2)
为了简单起见,本文采用J、C、D表示J(φ)、C(v)、D(v)。
假设1模型参数J及J-1是存在且有界的,另外,J和J-1的一阶导数是有界的。因此,存在正常数J1和J2满足:
(3)

(4)


为了后续自适应无模型轨迹跟踪控制器的设计,将系统运动学和动力学模型 (1)转化为欧拉-拉格朗日方程,表示为:
(5)

(6)
(7)
2 动态事件触发控制器设计
首先,基于上述模型转换,控制目标表述为:在外界干扰τb影响情况下,设计自适应控制律τ,解决USV无模型参数轨迹跟踪控制问题,使得USV的位置收敛到期望的位置,即:
(8)

为了实现控制目标,本节提出了一种基于动态事件触发的无模型自适应控制方案。首先,提出了一种滑模变结构控制器,并通过双曲正切函数来有效缓解抖振现象。然后,利用动态事件触发机制来调节USV数据交互频率,从而节省通信资源。最后,证明了跟踪误差是一直最终有界的,并且不存在Zeno现象。该控制算法的详细控制结构图如图1。
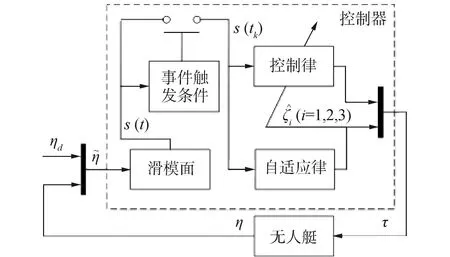
图1 基于动态事件触发的无模型自适应控制系统框图Fig.1 Diagram of modeless-parameter-free adaptive controller based on dynamic event-triggering
2.1 控制器设计
相较于依赖模型参数的控制机制,利用滑模变结构控制与欧拉-拉格朗日系统的性质,提出了一种无模型参数的控制策略。尽管USV模型存在固有的高度耦合非线性特性,但仍可以实现令人满意的性能。首先,将滑模切换函数s设计为:
(9)
式中k1∈R3×3为正定对角矩阵。
在假设1~4成立情况下,对式 (9)求导,并结合式(5)和 (7)可得:
(10)
为了方便,定义参数:
(11)
将 (11)代入 (10),可进一步描述为:
(12)
根据上述分析,控制律和自适应律设计为:
(13)
(14)
动态事件触发误差函数定义为:
es(t)=s(tk)-s(t)
(15)
式中tk表示触发时刻。
接下来,针对USV欧拉-拉格朗日系统提出一个动态变量ω(t):
(16)
式中:ω(0)>0;β>0;λ∈[0,1];α∈[0,1)。
(17)
(18)
2.2 稳定性分析
定义李雅普诺夫候选函数为:


(19)
对式(19)求导,将控制律 (13)和自适应律 (14)代入得:
(20)

(21)


(22)
代入动态事件触发动态变量式(16),得:

(23)

-ρV(t)+Δ
(24)
式中:
a6,β}>0
Δ=31μ1κ+32μ2κ+33μ3κ+
(25)
因此,采用控制律和自适应律能使USV的位姿误差收敛到零附近的一个小区域内,且系统内所有信号均满足全局最终一致有界性。
证明完毕。
2.3 不存在Zeno现象的证明


(26)
根据式(17)得出保证不等式成立的充分条件是:
(27)

(28)
最后,可以得出:
(29)
式(29)与 (26)相矛盾,因此Zeno现象是不存在的。
3 仿真分析
本节通过仿真对比实验,说明了控制器 (13)在不同外界干扰环境下的有效性和鲁棒性。USV模型参数如表1所示[16]。控制律和自适应律参数选择如表2所示。USV初始状态为ηT=[-2.1-1.010]T,vT=[0.010.010.01]T,USV参考轨迹表示为:

表1 USV模型参数Table 1 Model parameters of the USV
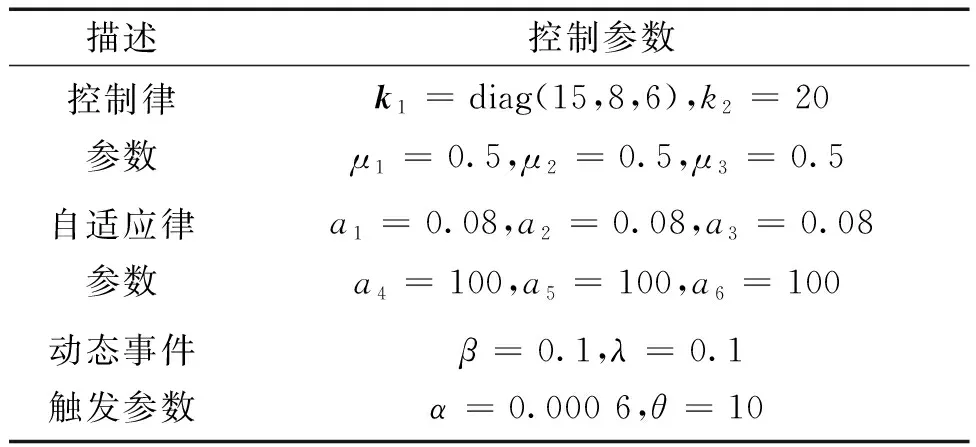
表2 控制器设计参数Table 2 Designed parameters of control laws
式中:T1=1.5π/ω;T2=2/ω;ω=0.04。
为了更好地证明鲁棒性,给出时变外部干扰公式为:
情况1:
(30)
情况2:
(31)
情况3:
(32)
仿真结果如图2~6所示。
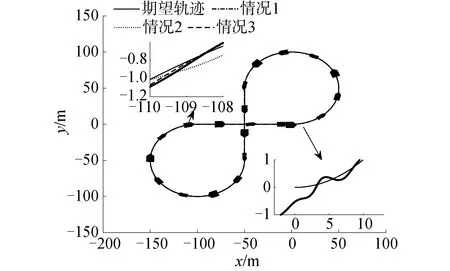
图2 USV轨迹跟踪Fig.2 Trajectory tracking of USV
图2为在不同外界扰动条件下USV的轨迹跟踪效果图。结果表明,在3种不同情况的时变干扰下,该控制器仍具有良好的跟踪性能,即使从情况1到情况3干扰幅值逐渐增大的情况下,USV也能稳定快速地跟踪期望轨迹。此外,图3展示了USV的控制输入信号。可以看出,当外界干扰的幅值变大时,控制输入立即做出了调整并保持了良好的鲁棒性。通过观察图4可知自适应估计变量是有界的。图5描述了动态变量的时间响应曲线,可以看出动态变量在40 s左右收敛到零附近。图6展示了动态事件触发条件下USV的触发时间间隔和触发次数。可以明显看出,在动态事件触发通信机制下,USV节省了95%以上的通信资源。因此,USV轨迹跟踪过程中,可以有效地降低通信频率,减少控制器与执行器之间的通信量,同时保持闭环控制性能。此外,从实验中还可以看出,在动态触发定律(15)下,没有Zeno现象。

图3 执行器控制输入Fig.3 Actuator control input
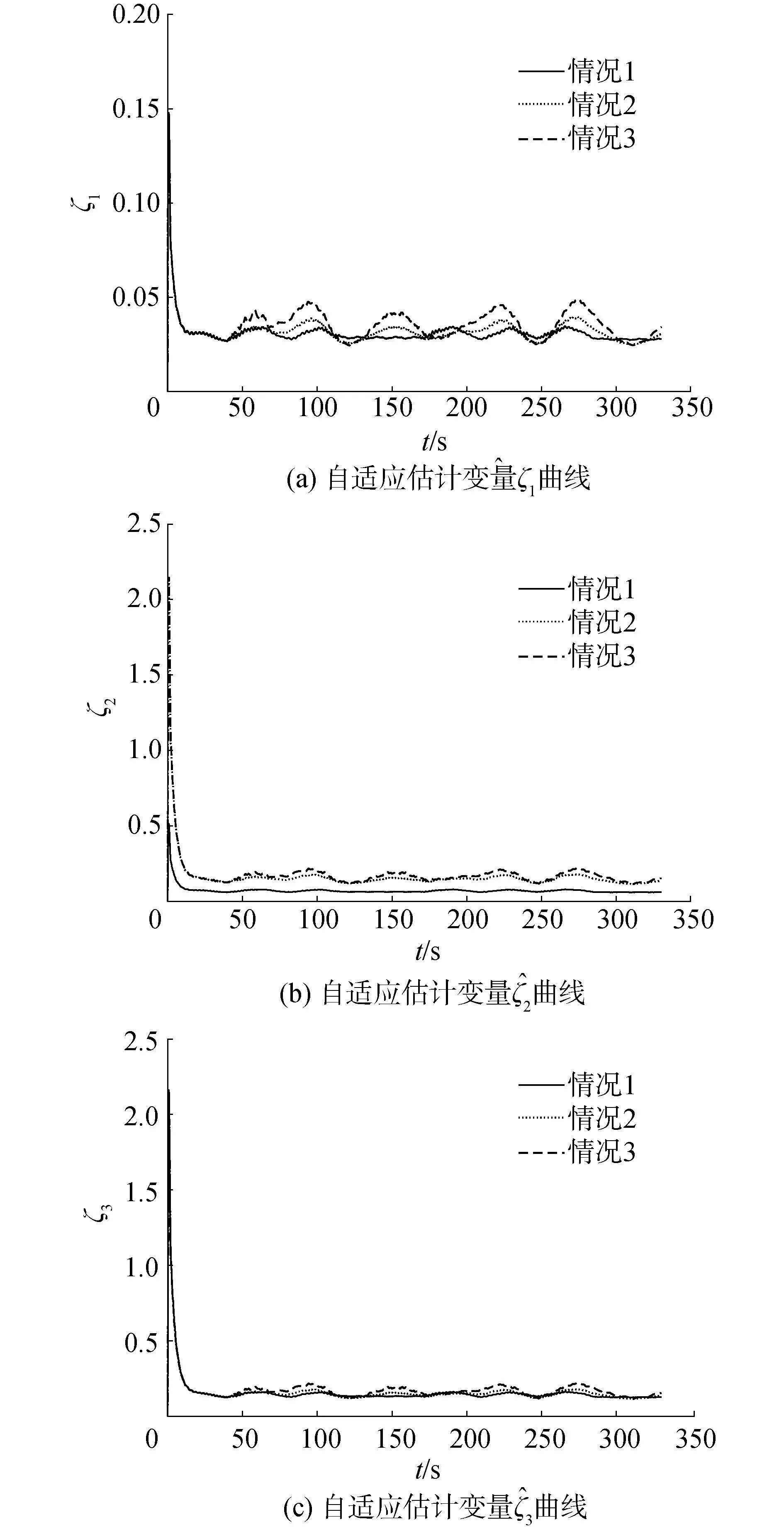
图4 估计变量Fig.4 Estimation variables
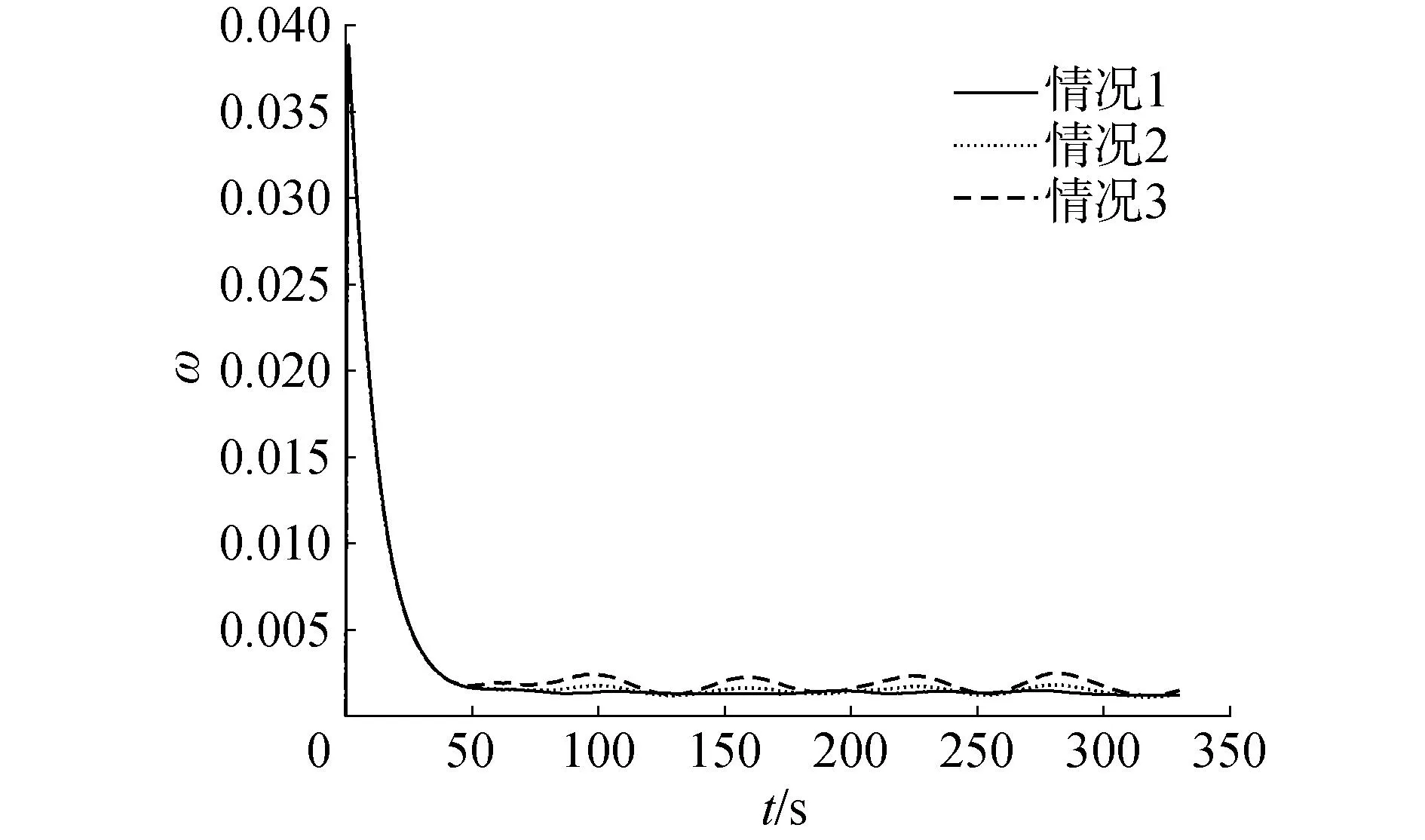
图5 动态变量ωFig.5 Dynamic variable ω

图6 动态事件触发条件下USV的触发次数和触发时间间隔Fig.6 Trigger times and trigger time interval of USV under dynamic event trigger conditions
4 结论
1)该控制方法在模型参数未知情况下能够较好地实现轨迹跟踪,具有较好的鲁棒性和自适应能力,并且具有优良的抗抖振效果;
2)相比传统时间触发机制,有效降低了控制器与执行器间的通信频率,规避了执行机构抖动,有效降低了计算成本和能源消耗,为无人艇轨迹跟踪的实际应用提供了有效参考依据。
考虑到该控制器是在执行机构健康情况下提出的,且收敛速度慢。此后的研究中将考虑执行器故障问题,提高系统的鲁棒性,并将有限时间控制技术应用于无模型控制机制中,提高系统收敛速度,使控制器具有更好的性能。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
农业机械学报(2020年2期)2020-03-09
环球慈善(2019年6期)2019-09-25
中华建设(2019年7期)2019-08-27
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09