多学科设计优化方法在水下无人航行器中应用
2024-01-15 05:34张磊胡震
哈尔滨工程大学学报 2024年1期
张磊, 胡震
(1.中国船舶科学研究中心, 江苏 无锡 214082; 2.深海技术科学太湖实验室, 江苏 无锡 214082)
海洋蕴藏着重要战略资源以及马航事件使各国清晰地认识到以水下航行器为代表的高技术装备的重要性,也对水下无人航行器的综合性能提出了更高的要求。航行器作为一种精密、复杂的工程系统,其设计过程涉及到结构、水动力、推进等多个学科。在建模和优化计算过程中需考虑各学科之间存在耦合和信息的传递作用,优化过程需要反复迭代,巨大的计算量使优算难以有效开展。多学科设计优化方法(multidisciplinary design optimization,MDO)将庞大而复杂的工程系统设计优化问题进行分解,转化为易于处理的学科内的问题进行优化,通过对各学科内的优化结果进行协调处理实现结果的一致性。非常适合水下无人航行器综合性能的优化计算。
MDO包括单级优化过程和多级优化过程。单级优化过程主要包括多学科可行方法、单学科可行法、同时分析和设计方法等。多级优化过程主要包括并行子空间优化方法、协同优化方法、两极系统综合优化方法。
文献[1]对各种优化算法进行了比较,发现每一种优化方法均有优缺点,其中单级优化算法收敛比较稳健,多级优化过程计算效率和收敛速度相对慢,同时也与具体优化问题相关,受分解和协调策略、近似模型建模方法、初始样本量等影响大。为了实现优化计算的最优,针对特定的使用需要进行算法的改进。MDO学科之间通过信息传递形成一个整体,学科之间存在强耦合现象,导致学科之间数据相互传输计算结构复杂,为此如何解除学科之间的耦合开展了大量研究[2-3]。目前该方法在水下航行器、飞行器设计等领域均得到了应用[4-5]。
水下航行器在多学科设计优化方法也开展了大量研究。美国海军研究所在2002年建立了水下航行装置设计开发计算工具和协同虚拟设计计算平台,规定了水下航行器学科分解方法,根据分析的重点不同可选择部分学科进行单独分析。文献[6]在水下重型航行器(HUV)的概念设计,多目标优化时采用了MDO的方法,建立了HUV的系统综合模型在优化计算时采用了非支配排序遗传算法(NSGA-II)和Kriging模型构建全局近似,以减少计算量。文献[7]以能耗最低为目标开展了新型水下航行器的多学科设计优化,在优化过程中采用了多学科可行体系结构作为该优化问题的解决策略。同时引入了耦合伴随方法来提高梯度计算的效率,提出了一种学科合并方法来进一步提高计算效率。针对水下航行器在设计的早期阶段存在设计变量和参数的不确定性的情况,文献[8]提出了一种改进的多学科设计优化方法,用于在不确定度下工程和策略方面的自主水下航行器的概念设计。将稳健设计与多学科设计优化相结合,对设计具有最优、可行和稳健意义的复杂工程系统具有重要意义。
在无人领域,国内开展了大量研究,文献[9]提出了多航态快速平台的概念,将传统水面舰船及潜艇设计与多学科设计优化方法相结合,开展了多航态快速平台的多学科多目标设计优化,相比初始设计方案,在满足设计要求的前提下平台性能有了很大提高。文献[10]对UUV总体设计方案进行了多学科优化设计研究。对艇型学科、耐压壳结构学科和推进系统学科3个典型学科进行了单学科优化分析;选取CSD的多学科优化设计方法,综合考虑艇型、结构、能源、推进、操纵性、总布置等学科之间的耦合关系,并结合UUV总体设计性能评估方法协调各学科内的性能指标,完成了UUV总体设计领域的确定性多学科优化设计应用研究。文献[11]为提高无人潜水器的总体性能和设计效率,研究了主体结构的外形阻力、耐压壳体的分析方法,建立了基于近似模型的阻力和结构分析模型及无人潜水器主体多学科多目标优化设计模型。利用第2代非支配排序遗传算法进行了优化求解,为无人潜水器主体设计提供了依据。
目前针对无人航行器的多学科优化设计取得了大量的成果,但是随着使用需求的不断提升,航行器需要实现更多的功能任务,在优化设计过程中需要涉及更多的学科,处理更多的变量,需要从传统螺旋上升式设计思路中走出来,开展以功能需求为目标的总体优化。本文采用多级优化过程的协同优化(CO)方法,其结构形式类似于工程设计中的总设计师系统负责总体指标的协调,各主任设计师负责相关领域内的优化设计。其结构形式适合当前系统工程设计的分工组织形式,非常适用于水下无人航行器集各领域优势力量开展共同研究、设计开发的形式,所以本文基于CO算法开展航行器优化计算。为了解决CO算法系统级优化计算时存在一致性约束造成收敛难的问题,本文主要基于Kriging方法建立系统层约束的近似模型,将一致性约束转化为不等式约束。
本文基于MDO方法开展无人水下航行器总体设计研究的主要内容包括:1)开展水下航行器在总体设计阶段的学科设计,将水下航行器分为外形和推进学科、能源学科、结构学科以及操纵性学科。分析了各学科内部的模型和计算方法,明确了各学科输入、输出和耦合关系;2)开展学科内参数和约束建模,确立总体设计的设计变量、系统参数和约束条件;3)以航行器重量最轻和机动性能最强为优化目标,获得设计变量计算最优解和优化设计主要输出结果值。
1 MDO优化计算方法
ND个耦合学科构成复杂系统的MDO优化问题为:
(1)
式中:g为约束函数,共有m个;X为优化变量;Xi为学科i的局部优化变量,为X的子变量;Y为系统状态变量,Yi是Y的子变量,为学科i的局部状态变量;Y·i为其他学科输出作为学科i输入的耦合状态变量。
学科分析是以系统设计变量、学科设计变量和其他学科对该学科的耦合设计变量为输入,利用本学科领域内的分析方法和工具得到学科状态变量的过程。一般包含解析法、实验设计法以及有限元分析方法等。系统分析也称为多学科分析,给定一组设计变量,通过求解系统的状态方程得到系统状态变量的过程。对于非层次系统存在学科之间的耦合关系,系统分析需要进行反复迭代,从而得到满足要求的结果,三学科非层次系统如图1所示。

图1 三学科非层次系统Fig.1 Three-discipline non-hierarchical system
本文主要基于CO算法开展MDO问题的求解。CO方法具有结构形式与当前系统工程设计的分工组织形式一致、学科内部自治的优点,适合水下航行器的总体优化设计。本文将Kriging方法与CO算法结合,改进CO算法。该方法基于Kriging方法建立代理模型解决收敛难的问题,采用该方法进行水下航行器总体设计的流程和数学模型如图2所示。基于Kriging方法建立学科层目标函数值和系统层共享设计变量的代理模型,有效解决了CO算法系统层约束函数是二次函数等式结构收敛难的问题,将等式约束转化为不等式约束。在学科内优化计算时,以系统设计变量、耦合输入该学科的状态变量和本学科输出状态变量的取值与系统分配的目标值的差异最小为目标,以学科内部的约束函数为约束,优化变量为本学科局部设计变量、系统级设计变量在该学科内的分量以及耦合输入该学科的状态变量,计算表达式为:

图2 基于近似模型的CO方法计算流程Fig.2 Calculation flowchart of CO method based on approximate model
(2)

(3)
2 水下无人航行器总体设计系统建模
开展MDO优化计算首先需要建立优化模型,将需求目标、约束条件等进行数学抽象表达。MDO系统建模包括:学科内建模和系统层建模,学科内需建立各设计变量的传递关系、学科间变量的耦合状态,明确设计优化的目标函数式、约束函数、设计变量、系统参数等。系统层需建立优化设计变量、总体优化目标、系统层设计变量、系统层约束函数等。
根据航行器的特点和工作需求可分为:外形学科、推进学科、能源学科、结构学科、电气和控制学科、操纵性学科。
2.1 外形学科建模
采用鱼雷形状,根据功能需要一般在艏部布置前视声呐、高度计、光学定位系统、CTD传感器等设备,在舯部布置有电池和电子设备舱、浮力调节舱、侧扫声呐、导航控制系统等,艉部布置有声学多普勒流速剖面仪、多波束测深声呐、通信系统和推进电机等,该布置结构形式和鱼雷的横向分段布置结构基本类似[12]。
考虑各类型线的加工难度、流体性能以及设备的安装空间需求,选择的第4种型线进行外形建模,其中艏段、舯段和艉段的主要表达式为:
(4)
式中:Lf为艏段长度;Lm为平行段长度;La为艉段长度;D0为最大直径;xf为纵轴上点距离横剖面最大直径处的距离;xa为艉段上点的纵向位置距离横剖面最大直径处的距离;nf和na分别为艏段和艉段的抛物线指数。
阻力包括光滑的裸艇体和附体阻力,在初始设计阶段,阻力通过经验公式得到,仅考虑表面光滑的裸艇体的情况,考虑到艏艉部形状系数的影响,Gillmer和Johnson基于湿表面积和艏艉部形状参数进行改进对阻力提出了近似计算方法[13]:
(5)
水下航行器附体包括GPS天线、声呐、照明灯、摄像机、频闪灯以及探测设备,这些附体的形状、截面积均影响阻力系数,表1规定了几种附体的阻力系数估算值[14]。
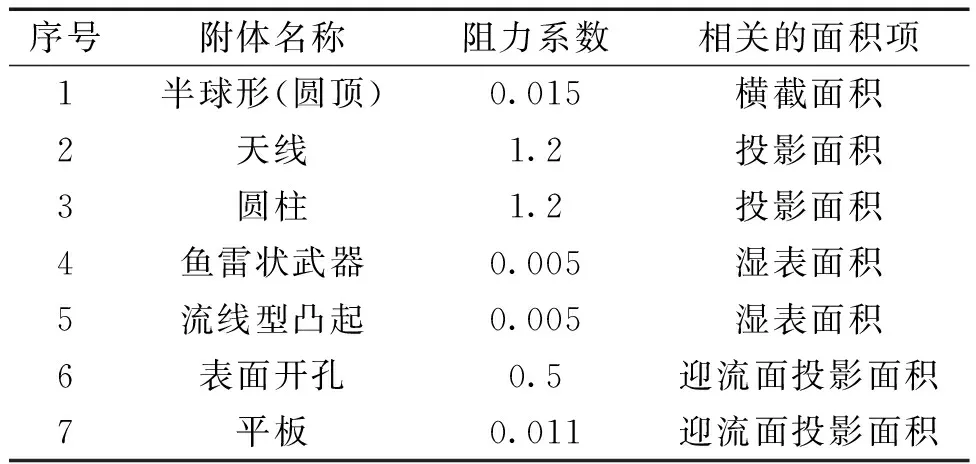
表1 典型附体阻力系数估算值Table 1 Estimated value of attached resistance coefficient
2.2 推进学科建模
目前AUV和ROV常用的推进系统主要有Engtek SubSea Systems公司研发的,这是标准型号产品可以选择使用。工作深度按照300、600、1 500、3 000和6 000 m配置,同时该系列产品电机控制板与模块合为一体。文献[15]提供了主要推进器的型号和性能参数,根据推力需求对应得到推进器的功率PE,具体推进器推力和功率的关系建立近似模型,函数关系如图3所示,推进器功率和推力基本线性相关,近似模型拟合得也非常好。推进器工作周期内需要的电量QE为:

图3 推进器功率和推力的关系曲线Fig.3 The relationship between thruster power and thrust
QE=PEt
(6)
2.3 能源学科建模
航行器整个系统分为2套电压回路,一路为主蓄电池组,一路为副蓄电池组。主蓄电池组主要承担推进器的供电,副蓄电池主要承担控制系统、通信系统、侦察探测、海洋测量以及成像探测设备的供电。
航行器目前采用成熟的锂电池,单块质量约为1.6 kg,电压为3.2 V。主蓄电池将36只单体电池串联作为一个单元,副蓄电池采用8只串联作为一个单元。根据单体电池的尺寸得到主蓄电池的一个单元的尺寸为205 mm×300 mm×290 mm(含保护罩和滚轮),主蓄电池采用滚轮方式在航行器电池舱内安装,进而可以确定航行器电池舱的直径为550 mm。
水下航行器总的电量可根据产品在正常使用下各模块的功率和续航时间计算得到,进而得到电池组的能量需求Q、电池组的重量Md、电池组的体积Vd、单体电池的数量以及电池组的长度Ld。各参数的表达式为:
(7)
式中:Q为电池组总的容量;QE为推进器需要的能量;Pq为所有电气设备的功率;t为电气设备工作时间;Ce为能量转换系数;ρmq为电池能量质量密度;ρVq为电池能量体积密度;md为单组电池质量;ld为单组电池长度。
2.4 结构学科建模
水下航行器的电池以及一些设备需要在常压下工作,耐压壳体为设备提供合理的工作环境。耐压结构的设计和建造采用CCS规范进行。本文的水下航行器耐压结构采用圆柱体形式,圆柱采用肋骨进行加强。对于圆柱体需要从屈服和屈曲2个方面开展相邻肋骨中点处壳板的周向平均应力σ1、肋骨处壳板的周向应力σ2、肋骨应力σl、肋骨之间的壳板屈服应力Pcr1、相邻舱壁之间的屈服应力Pcr2、球形封头的壳板应力σ3、球形封头的屈曲压力Pcr3等7个方面的计算见式(8)(具体各参数的取值和计算方法见文献[16])。
(8)
非耐压结构包括水下航行器框架、轻外壳、稳定翼和浮力材料。框架结构提供各种外部设备的整体连接、支承和航行器系固、牵引功能。根据设备布置情况和起吊、搁置等工况的受力情况取动载荷系数为1.7、按照作业频次和吊运的繁重程度取作业系数为1.2。轻外壳主要作用是保持航行器的外形,受到外载荷作用时,取动载荷系数为2。选择船用高强度玻璃钢材料比较合适,在糊制过程中需要增加加强筋,以提高其刚度。稳定翼考虑到水面状态和碰撞载荷的作用具有较大的随机性,取其动载荷为2。浮力材料为航行器的浮力重力提供平衡,浮力材料需要在有限的安装空间内安装,且要提供足够的浮力要求,所以对浮力材料密度和可加工性能要求很高。选用密度为400 kg/m3的玻璃微珠复合泡沫塑料作为浮力材料。
2.5 电气和控制学科建模
根据任务需求,该航行器设备主要有:导航设备、通信系统、侦察探测和海洋测量设备、光电成像探测设备以及控制设备。导航设备包括:惯导系统、多普勒声呐计程仪、差分GPS、超短基线水声定位系统、长极限水声定位系统等。通信系统包括水声通信、无线电通信、卫星通信、以太网通信等。侦察探测和海洋测量设备包括前视声呐、侧扫声呐、多波束测深声呐、声学多普勒流速剖面仪、温盐深测量仪等。光电成像探测设备包括水下照相机、水下灯等。控制和电气学科相对于其他学科功能比较独立,目前由系统根据需求开展设计研究,本文主要分析该学科的重量、体积以及功率需求对航行器总体影响,对于该学科功能实现情况可单独分析。
2.6 操纵性学科建模
航行器的外形为鱼雷形,本文采用鱼雷的流体动力公式,其中平衡冲角α0、平衡舵角δ0、纵向运动的稳定性Gr、横向运动的稳定性Gq均采用工程估算的方法求得。在流体动力计算采用部件叠加法,即将艇体、鳍舵和对转桨的流体动力分别计算然后再相加。本文主要采用中国船舶科学研究中心结合试验数据提出的经验公式对流体动力进行估算)式(9))(式中各参数值的计算见文献[17])。
(9)
各学科变量之间的耦合关系进行分析形成设计矩阵图(如图4所示),其中M、P、R、F、L和A分别表示重量、功率、阻力、推力、尺寸和信号。

图4 水下航行器总体设计结构矩阵Fig.4 Matrix diagram of design structure of underwater vehicle
3 水下无人航行器MDO分析
本文研究的水下无人航行器主要应用于民用领域,主要承担水文调查、环境监视、海上搜救援助、探索海底结构和海图绘制等任务。其工作深度为1 500 m,最大航速5 kn,巡航速度3 kn,推进采用电机推进,在巡航速度下续航时间100 h。
本文采用鱼雷形状,根据功能需要一般在艏部布置前视声呐、高度计、光学定位系统、CTD传感器等设备,在舯部布置有电池和电子设备舱、浮力调节舱、侧扫声呐、导航控制系统等,艉部布置有声学多普勒流速剖面仪、多波束测深声呐、通信系统和推进电机等,该布置结构形式和鱼雷的横向分段布置结构基本类似。
3.1 优化目标
对于航行器总体优化设计一般在方案设计之初,在设计之初首先提出必要功能性能以及适用环境要求,优化设计的目的一般包括以下部分:1)质量最轻;2)提高航行器的机动性能,本文用回转直径表示机动性能,回转直径越小机动性能越好。
3.2 设计变量和系统参数建模
总体设计的设计变量主要分为以下几类,外形的尺寸、艏艉部曲线的形状参数等影响阻力性能的参数,以上参数的改变可以改变航行器的形状,以探求最优参数获得最小的航行阻力。鳍舵的几何参数、鳍舵面积等影响操纵性能的参数,以上参数可以影响航行器的稳定性以及机动性等运动能力。本文在优化计算过程中为了方便,假设水平翼舵和垂直翼舵的大小和位置全部相同,主要优化计算航行器的外形参数、操纵性参数、结构参数等,具体各参数和取值范围见表2。在优化计算过程中各学科内的系统参数见表3。设计优化过程中需要考虑的约束主要包括结构约束、操纵性约束和总体尺寸约束,具体约束函数见表4。
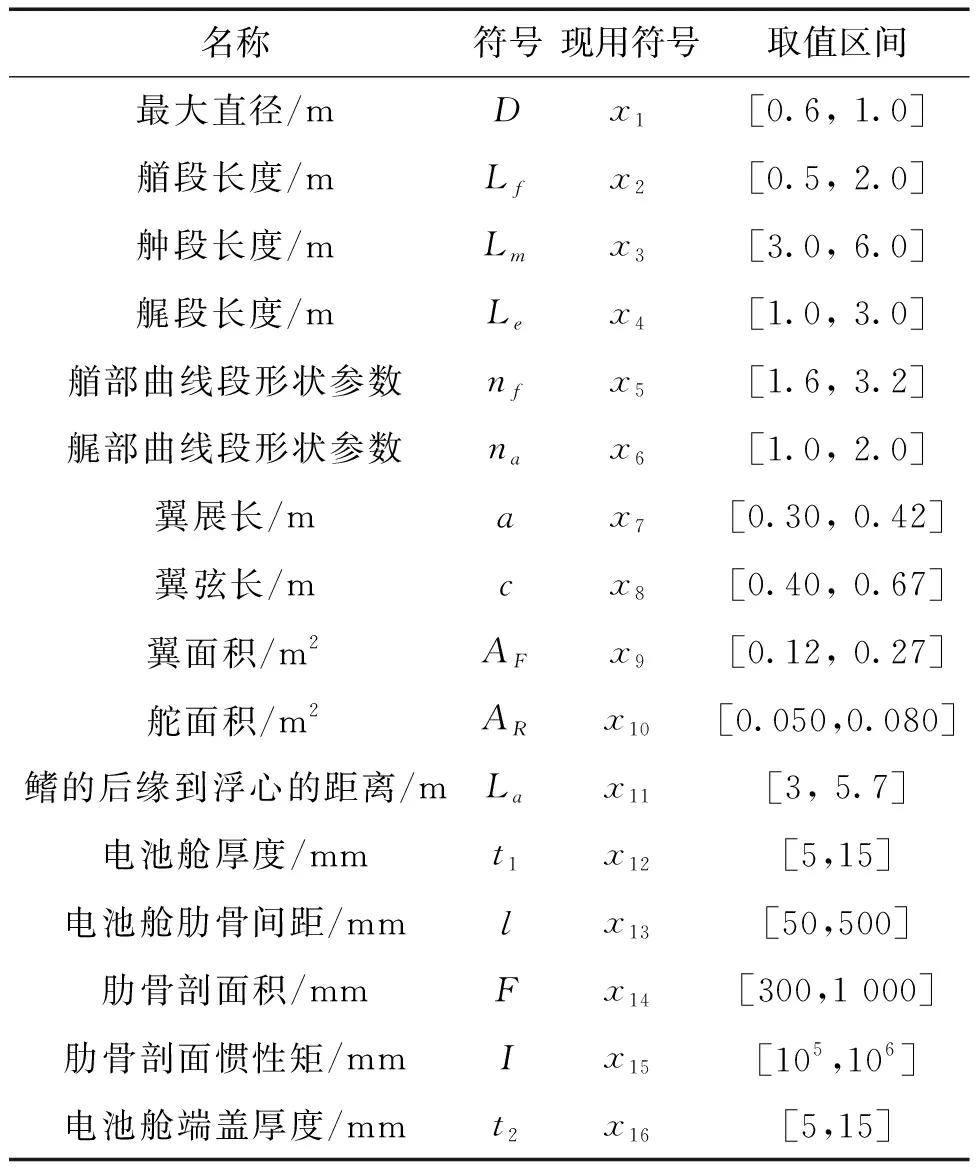
表2 设计变量和取值范围Table 2 Design variables and value ranges
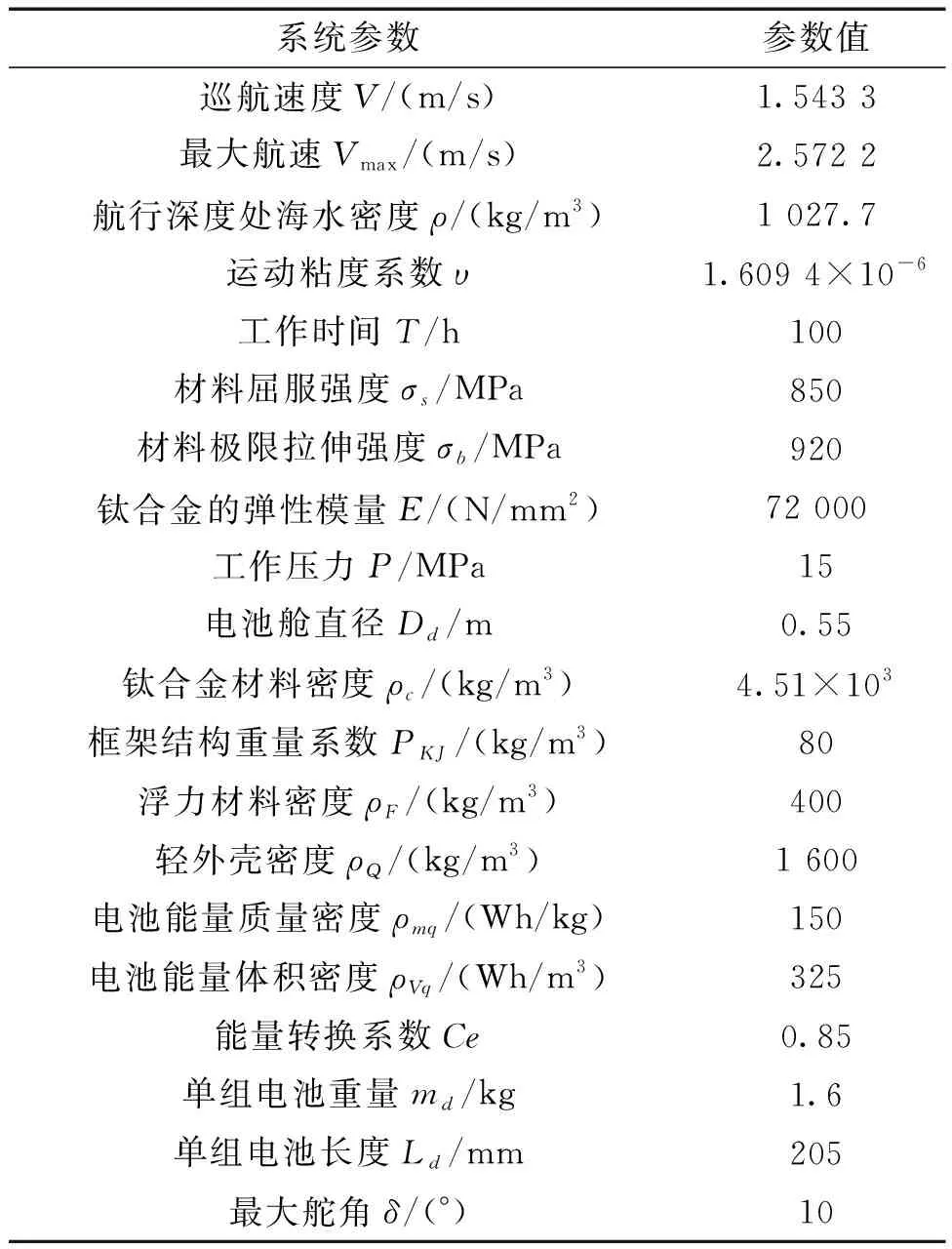
表3 系统参数Table 3 System parameters

表4 约束函数Table 4 Constraint function
3.3 优化模型和计算结果
本文在优化计算时考虑航行器的质量和回转半径2个目标,建立多目标优化函数,将2个目标采用线性加权组合法将多目标函数转化为单目标函数。在以上2个目标转化过程中,需要将质量指标和回转直径归化到统一数量级,借鉴其他航行器的经验数据,本文取w1=2 500,w2=50。在计算过程中根据偏好关系更加重视质量指标,所以取质量目标和承载能力方差目标权重分别为k1=0.67;k2=0.33。
约束函数为表4所列函数,进而得到优化计算表达式为:
findX={x1,x2,…,x11}
s.t.g1(X,D)≤722.5;g2(X,D)≤977.5;
g3(X,D)≤510;g4(X,D)≥22.5;
g5(X,D)≥27;g6(X,D)≤722.5;
g7(X,D)≥22.5; 0≤g8(X,D)≤0.0524;
0≤g9(X,D)≤0.0524;0.4≤g10(X,D)≤1;
0.4≤g11(X,D)≤1;g12(X,D)≥0;
g13(X,D)≥0;g14(X,D)≥0;
g15(X,D)≤6.5;g16(X,D)≥0;
XL≤X≤XU
X={x1,x2,…,x16};
D={V,Vmax,ρ,υ,T,PR,σs,σb,E,P,Dd,ρc,PKJ,ρF,ρQ,ρmq,ρVq,Ce,md,Ld,PR_i,FF,δ}
(10)
式中:M为航行器的质量;Dc为航行器的回转直径;f为目标函数;X为设计变量;D为系统变量;gi为约束函数。
本文的多学科设计优化中不涉及到控制数据在各学科内的传输,控制系统设计学科和其他学科之间的耦合关联不是很大,本文在多学科设计优化时不考虑控制系统数据的传输,只考虑控制学科设备的重量和体积,为了计算方便在分析过程中将控制设备的重量和体积纳入电气学科中,后续设计过程中根据任务需求和各学科的工作内容可以专门进行控制学科的数据分析工作。
基于近似模型的CO算法开展确定性多学科设计优化计算,计算过程主要分为3步:1)解耦,建立耦合状态变量和学科内设计变量之间的近似模型;2)计算建立各学科内目标函数值与学科内设计变量(包含系统变量在学科内的分量和学科内专有设计变量)和耦合输入学科变量的近似模型;3)基于CO算法开展优化计算。采用试验设计方法对设计变量、耦合设计变量进行50个取样,以各学科模型进行学科分析得到学科内的目标值{Ji}(i=1,2,…,6)和学科的输出{Yi}(i=1,2,…,6),然后建立学科内输出的耦合设计变量和学科内设计变量的近似模型,建立{Ji}和学科内设计变量、耦合设计变量之间的近似模型。最后在近似模型的基础上展开系统级优化。在整个优化过程中采用序贯加点的模型更新策略,将优化结果代入样本点,实现近似模型全局最优近似直至收敛。本文在近似建模过程中可以得到设计变量全局优化附近的样本值,以得到的全局优化附近的样本点为初始点采用SQP方法开展确定性优化计算,目标函数的迭代历程如图5所示,计算得到航行器的重量为1.958 4×103kg,回转直径为40.602 4 m。各设计变量的计算值如表5所示,对应主要的输出情况如表6所示。
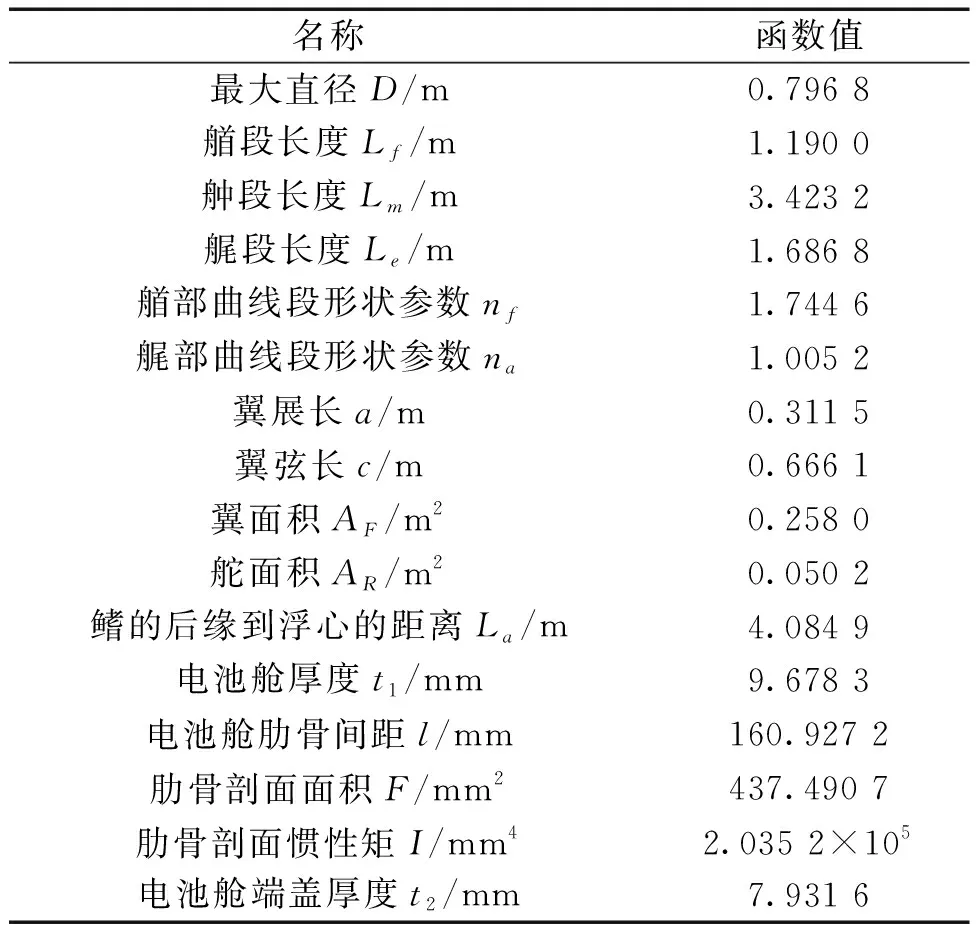
表5 设计变量优化计算结果Table 5 Design variable optimization calculation results
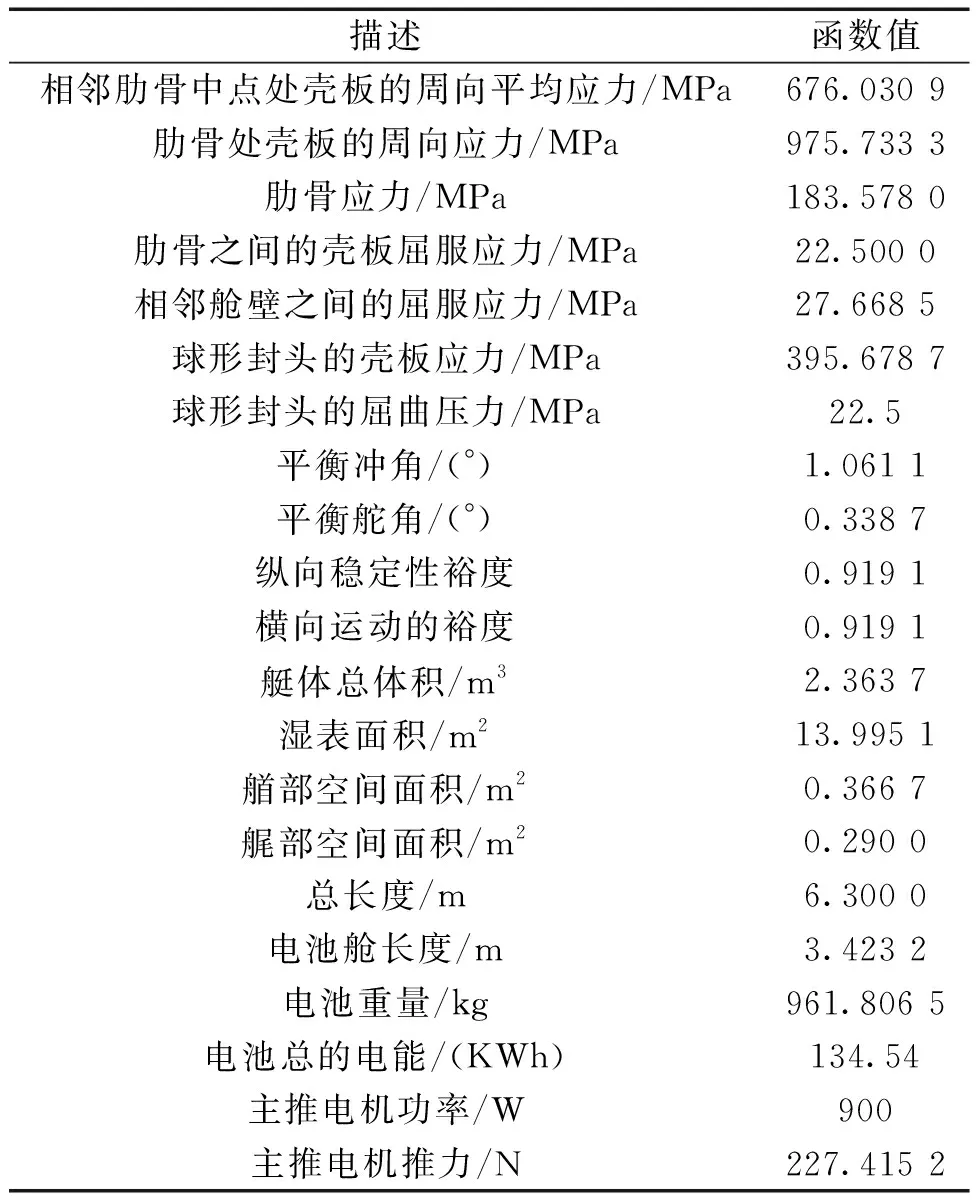
表6 优化设计主要输出结果Table 6 Optimized design main output results

图5 目标函数的迭代历程Fig.5 The iterative history of the objective function
4 结论
1)该方法可适用于多种类型的水下航行器的总体设计,在论证阶段可以根据需求开展总体指标的论证,在方案设计阶段可以采用该方法开展总体指标的细化和分解到相关系统。
2)利用该方法可以适用的不同深度、任务以及外形需求的水下航行器。对于不同任务需求,如工作时间、任务内容不同,主要影响能源学科和任务需要的电气学科的建模。对于不同深度需求,主要影响结构学科的建模。对于不同外形主要影响外形学科的建模。根据不同航行器的特点,有针对性的开展相关学科的建模,然后才有MDO方法开展相关参数的优化计算,可普遍适用于航行器的设计工作。
3)以某航行器为研究目标,以重量最轻和回转半径最小为目标,采用基于近似模型的CO算法开展多学科设计优化计算,获得了总体优化中的最大直径、翼展长、翼面积等16个设计变量的最优解,获得了21个主要输出结果值,为水下航行器总体方案的选择和设计提供了理论支撑。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
疯狂英语·新读写(2021年6期)2021-08-05
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
大型铸锻件(2015年5期)2015-12-16
湖南理工学院学报(自然科学版)(2014年1期)2014-02-28
现代防御技术(2014年6期)2014-02-28