交流异步伺服技术在风电机组变桨系统开发中的应用
2021-01-23 07:59潘天赐
通信电源技术 2020年19期
潘天赐
(桂林理工大学博文管理学院,广西 桂林 532100)
0 引 言
1 风电机组变桨系统结构及作业原理
风电机组变桨系统主要由6个模块组成,分别是传感器信息采集模块、减速箱控制模块、系统备用电源模块、伺服系统、系统配电模块及变桨主控制器。其中,伺服系统又可以拆分为传感器、伺服电机、伺服驱动器三部分。
风电机组每个浆叶在伺服控制系统作用下,浆距角变化速度得以控制,通常每个桨叶每秒钟变化角度在10°以内,0°~92°均能够得到有效控制[5]。为了实现独立作业,系统采用伺服电机单独对各个桨叶采取独立调节,利用编码器反馈电机转角结果,在伺服驱动器控制下,实现桨叶转动闭环控制。当电机减速箱线路得以连接时,桨叶轮毂内齿圈随着主动齿轮的转动而转动,在前者所处位置安装位置开关,实现电机作业状态实时控制。
2 适用于风电机组变桨系统控制的伺服系统选取
伺服系统是风电机组变桨系统控制的核心部分。由于风电机组变桨操控要求较高,除了要求伺服系统具有较强的环境适应能力,还要求系统作业期间定子与转子均发热,具有较高的作业效率,尽可能简化系统结构,以便结构优化也检修等工作开展。为了选取一种适合风电机组变桨系统开发的伺服系统,本文选取3种伺服系统对比其性能,结果如表1所示。
对比表1中的8项指标可知,异步交流伺服电机的性能更佳,虽然制动控制方面存在一定难度,但是其他指标较其它两种伺服系统优势更大。因此,本研究选取异步交流伺服电机作为系统开发核心工具。

表1 3种伺服系统对比选取
3 伺服技术在风电机组变桨系统开发中的应用功能分析
伺服技术具有较为丰富的控制功能,支持多类型系统开发,交流异步电机伺服系统作为新型伺服技术,在风机组变桨系统中的应用,可以发挥独特作用,主要实现功能如下。
(1)支持电流环、速度环、位置环同时控制,依据风电控制相关参数运算结果,下发系统位置控制指令,用于调整桨叶作业位置,使得系统操控更加精准。
(2)伺服系统可以接收冗余编码器信号,利用编码器对变桨伺服采取控制,实现闭环作业。为了进一步提高编码器测量数据精准度,提升闭环作业操作水平,伺服系统结构中添加了位置编码器,用于测量绝对位置,为系统操控提供精准数据。
(3)支持系统自诊,通过发出状态信号,与机组安全链建立连接,当发现系统作业异常时,立即中断系统供电装置,从而快速停机,在伺服电机的作用下自行诊断系统,挖掘系统作业问题,面对不同种情况生成相应的处理策略。
“秦月”由“秦富1号”和“嘎拉”杂交育成。果实呈圆形或长圆锥形,大小均匀,果个与嘎拉接近,果皮鲜红,果肉黄白,肉质细脆多汁,酸甜适口,较耐贮存。在渭北高原南部地区8月底成熟,渭北高原中部地区9月上中旬成熟,刚好赶上中秋节和国庆节,是一个优良的中熟苹果新品种。
(4)具备长期连续作业功能。为了避免系统遭受环境等因素影响,供电模块作业异常无法正常为系统供电,伺服系统增加了备用电源,在主电源作业异常情况下接入电路。
4 基于交流异步伺服技术的系统硬件开发
4.1 伺服驱动框架结构设计
伺服驱动器是系统的核心控制装置。本文在开发系统时,着重探究了伺服控制硬件框架结构。本研究选取TMS320F812作为核心处理器,利用模拟信号检测装置采集信号,在多功能控制器及驱动器作用下完成伺服驱动控制。图1为伺服驱动框架结构设计方案。
图1中,伺服驱动框架结构主要由模拟信号调理、参数存储、转速脉冲信号接口、位置反馈信号接口、中断接口、电源监控、光电隔离、I/O端子、通信接口、泄放控制及驱动隔离电路等装置构成。系统利用通信接口检测信号,当系统检测到模拟信号以后,自动对信号进行调理,经过泄放控制将信号传输至功率主回路,经过驱动隔离处理实现系统作业功率控制。

图1 伺服驱动框架结构
4.2 系统作业安全硬件设计
为了提高系统作业安全性,本研究在系统硬件结构开发层面上进行了探究,通过设置监控、复位等装置,达到保护系统安全运行的目的。本系统主要设置了两部分安全硬件结构,其中一部分为电源监控硬件结构,通过观察DO电平变化数值,判断机组作业是否安全;另一部分为看门狗保护,可在伺服驱动器死机情况下起到保护作用。当伺服电机从正常作业转变为死机状态时,看门狗自动复位,检测到DO状态为低电平,此情况下机组恢复到安全状态。
5 基于交流异步伺服技术的系统软件开发
5.1 异步电机内环控制开发
本研究依据电机转矩控制方程和转子磁链方程,构建动态作业原理下的异步电机作业模型,利用转子磁场定向矢量控制方法设计内环控制结构,如图2所示。
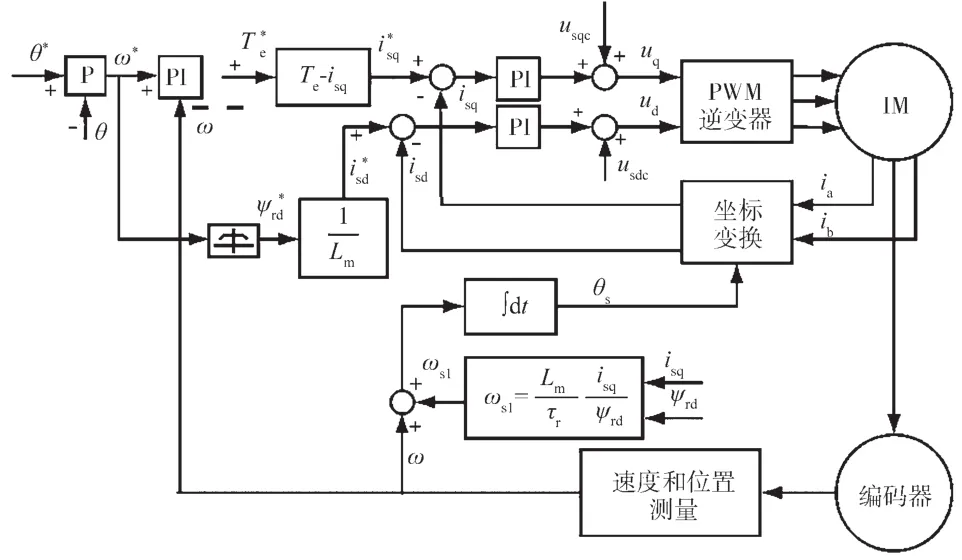
图2 异步电机内环控制结构
图2中,电机作业产生信号经过编码器处理,生成具有编码的信号,利用测量装置采集位置信号和速度信号数据,传送至PI端,经过一系列的内环控制处理,完成PWM逆变换,而后变换坐标,利用动态模型进行计算。根据动态计算结果,对磁场内异步电机矢量进行有效控制。关于矢量控制的软件结构,主要由位置、速度、电流三部分组成。
5.2 系统通信接口设置
本系统选取CAN通信协议作为通信接口设置工具,创建变桨距主控装置和伺服驱动器之间通信桥梁,借助RS-232串行接口和RS-485串行接口传输信号。另外,系统数据信息的交换处理采用的技术为Modbus协议,按照此协议转换数据信息。
5.3 系统异常作业状态判断及软件控制
传统的伺服系统安全性能薄弱,改善系统异常作业下的软件控制体系显得尤为重要,通过安全诊断,获取伺服系统当前作业状态信息,判断其是否处于危险作业状态,为系统修复处理提供更多时间。通常,将采集到的系统作业诊断结果汇总到DO通道内,而后经过继电器转入机组信息传输链路内,通过启动伺服驱动器,对机组作业状态进行调控。以下为两种常见的伺服系统作业异常情况,通过分析异常情况特点,制定软件控制方案。
(1)装置严重损伤情况。此类情况描述的是伺服系统中某一装置或者多个装置在遭受严重创伤,出现电压或者电流过高等情况,导致散热板过热、驱动装置异常等问题产生。面对此问题采取的软件控制:封锁系统的脉宽调制输出端,切断接触器,使得线路中电流为零,在DO端输出低电平。当管理人员重新为系统上电,才可以连接接触器,恢复正常作业。
(2)编码器发生故障。此类故障描述的是桨距角、电机编码器断线,或者编码器位置差数值过大,均会导致其作业异常。面对此情况,通过控制伺服状态,使其输出低电平。另外,还可以将顺浆动作控制模式设置为VVVF模式,采取紧急状态切断。
6 系统作业常见的故障及处理建议
由于交流伺服驱动器在系统应用开发中存在系统维护简便、开发难度低等优势,因此成为了风电机组变桨系统开发的首要选择工具。随着风力发电科学技术水平的提升,对顺浆控制要求有所提升,当前拟定的控制模式仍然存在漏洞,如主电源供电异常等问题。本文以此问题为例来分析系统作业故障,提出处理建议。
本系统通过设置备用电源继续为系统供电,通常选取超级电容组或者蓄电池组作为电源装置,借助逆变器完成顺浆操作,但降低了顺浆作业性能。所以,提升系统顺浆作业性能成为了发挥系统作用的关键,可以采取如下两种方案改善此类性能。
(1)为系统配备1台辅助装置,通过控制系统作业频率及时调节系统作业环境,从而避免伺服器发生故障。此项操作使用到的装置为变频器,当检测到伺服器发生故障时,利用该装置控制交流电机,使得桨叶从当前作业状态立即转变为顺浆状态。
(2)在伺服控制器现有功能基础上增加冗余控制功能。该项操作功能指的是借助相邻桨叶作业能量,带动与其相邻且处于故障状态下的桨叶立即完成顺浆动作,使得驱动器得以恢复到正常作业状态。
7 结 论
本文围绕风电机组变桨系统开发方案展开研究,选取交流异步伺服技术作为核心技术,设计系统框架结构。该设计方案以伺服驱动器作为重点,拟定了硬件结构设计方案和软件开发方案。此外,针对系统作业期间可能发生的故障进行分析,提出了处理建议。加深了对交流伺服器控制的探究,有助于为风电机组变桨控制策略研究提供参考依据。
猜你喜欢
建材发展导向(2022年18期)2022-09-22
网络安全与数据管理(2022年1期)2022-08-29
北京航空航天大学学报(2022年6期)2022-07-02
锻压装备与制造技术(2021年5期)2021-11-13
北华大学学报(自然科学版)(2021年3期)2021-07-13
科学技术创新(2021年5期)2021-03-17
航天工业管理(2020年9期)2020-12-28
——编码器
演艺科技(2020年7期)2020-08-13
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23