自供能智能减震器自耦合控制研究*
2021-11-16 06:45朱云邹鸿翔魏克湘
动力学与控制学报 2021年5期
朱云 邹鸿翔 魏克湘
(湖南工程学院汽车动力与传动系统湖南省重点实验室,湘潭 411104)
引言
为了满足人们对汽车乘坐舒适性和操纵稳定性的更高需求,同时提高汽车的燃油经济性,主动式及再生式悬架系统在汽车工程领域引起了越来越多的关注.对于商用车来说,只有10%-20%的燃油能量用于驱动车辆,因为大部分能量被道路阻力、运动部件之间的摩擦和热量损失所浪费[1].传统减震器通过阻尼将振动能量转换成热量,最终耗散到大气中.目前一些技术比如半主动悬架、液压主动悬架、电控主动悬架等已应用到一些高端乘用车[2-4]和重载车辆[5,6],但这些技术成本高,耗能大 .而将结构振动能量回收与智能阻尼器相结合的方法,具有效率高、响应快、可控性强以及可实现能量再生等特点,在实现车辆振动能量回收上有着较好的应用前景[7,8].
近年来,研究者们先后从理论和试验上验证了再生与自供能减震器的可行性,这类减震器通过回收振动能量,实现降低能耗的同时确保减震器的高性能和高可靠性[9-11].研究表明,通过回收悬架振动的能量可以提高电动汽车、混合动力汽车和燃料电池汽车的续航里程[12,13].但由于智能阻尼器力学性能比较复杂,很少有学者建立基于智能阻尼器的悬架模型,也缺少自供能智能减震器的控制研究.
本文基于四轮独立轮毂电机驱动电动汽车的减震需求,设计了一种自供能智能减震器.在分析了自供能智能减震器非线性特性的基础上,将Karnopp控制规则引入到自反馈耦合控制中,并设计了简单实用的自供能智能减震器自耦合控制策略,建立了相应的悬架控制模型,并利用MATLAB/Simulink进行仿真,将设计的自耦合控制策略的控制效果与单纯自反馈控制和目前广泛采用的被动悬架控制效果进行比较.
1 自供能智能减震器
基于四轮独立轮毂电机驱动电动汽车的减震需求,设计一种适合四轮独立驱动电动汽车的自供能智能减震器(如图1),包括外缸部分、内缸部分和电控系统.自供能智能减震器从功能上可以分为俘能部分和智能阻尼器.俘能部分利用滚珠滚动压迫压电块组合,将减震器上下的振动转换为单向的压迫,实现了机械整流的功能,从而俘获更多机械能且有利于控制,并且俘能部分和智能阻尼器在结构上并联,提升了减震器的工作效能并节省了空间.电控系统接受俘能部分得到的振动能量和振动信息,计算并输出电压控制电流变弹性体的阻尼,从而实现智能阻尼器的智能控制.

图1 自供能智能减震器结构设计Fig.1 The structure design of self-powered intelligent shock absorber
1.1 自供能模型
自供能智能减震器的俘能部分利用滚珠滚动压迫压电块组合,将上下的振动转换为单向的压迫.显然地,俘能电压(即自供能电压)与悬架相对运动的速度和位移相关,即:

其中,st为车轮位移,sb为车身位移,st-sb为悬架相对运动位移,ṡt-ṡb为悬架相对运动速度,e1、e2为待定系数,通过最小二乘法使模型预测和试验结果的误差最小来确定.
1.2 智能阻尼器模型
自供能智能减震器的阻尼器材料为电流变弹性体,工作模式如图2所示.电流变弹性体主要由高分子聚合物组成的基本材料以及具有高导电率和高介电常数的电流变颗粒组成.Li等[14]在经典三参数固体模型的基础上,发展了一个四参数粘弹性模型,如图3所示.这个模型中,k1,k2和c2组成一个标准的粘弹性固体模型,主要用于处理模型的阻尼特性,而kb表示依赖于电场的模量.设复应力为τ*,复应变为γ*,复模量为G*,则应力应变关系如下:


图2 电流变弹性体工作模式Fig.2 The working mode of electrorheological elastomer

图3 电流变弹性体的四参数粘弹性模型Fig.3 Four-parameter viscoelastic model of electrorheological elastomer
式中,G1和G2分别为复模量的实部和虚部,可通过线性粘弹性理论推导得到.

(3)式中,ω为激励频率.k1,k2,kb,c2四个参数值通过最小二乘法使模型预测和试验结果的误差最小来确定 .暂时没有试验数据来描述k1,k2,kb,c2与电场强度E的函数关系.魏克湘等人[15]研究电流变弹性体结构动力学仿真所用数据如表1所示.设激励频率为 1Hz、5Hz、10Hz,由式(2)和式(3)计算出G1,G2,如表2所示.

表1 不同电场作用下的 k1,k2,kb,c2值Table 1 Values of k1,k2,kb,c2

表2 不同电场作用下的G1,G2值Table 2 Values of G1,G2
如图4所示,假设输入电压Uin与电场E成线性关系,可设如下等式成立:

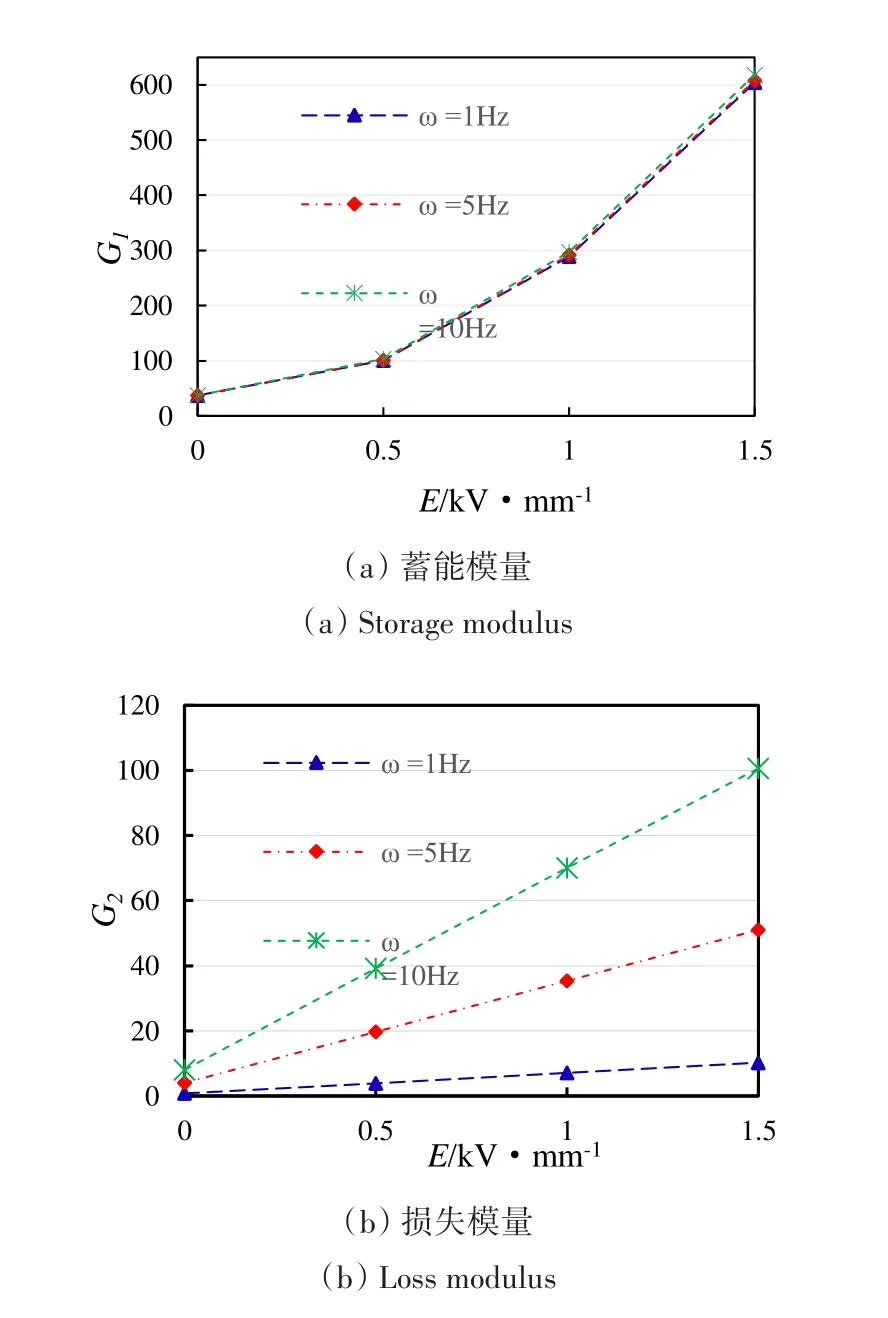
图4 电流变弹性体模量与电场的关系Fig.4 The relationship between electrorheological elastomer modulus and electric field
式中,a0、a1、a2、b0,b1为待定系数,可以通过最小二乘法使模型预测和试验结果的误差最小来确定.其中Fd为减震器阻尼力,sm为移动电极位移,依据上述模型,则有:

联立式(4)和式(5)得到减震器阻尼力Fd与输入电压Uin的关系,为:

2 车辆动力学模型及自耦合控制
如图5的自供能智能减震悬架1/4整车模型,根据经典力学可以得出悬架系统的运动方程:
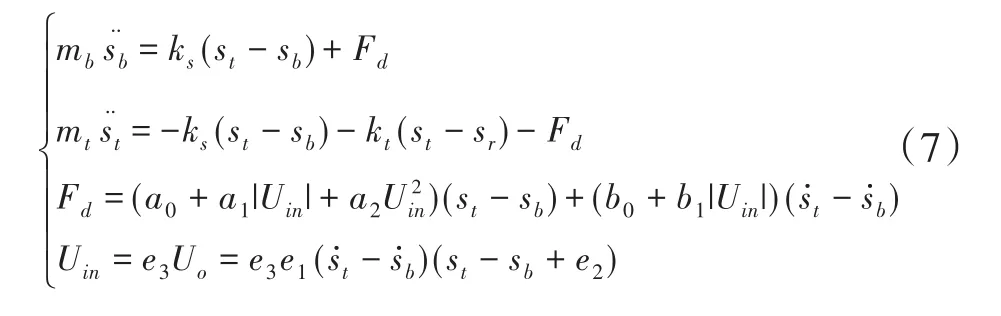

图5 自供能智能减震悬架1/4整车示意图及模型Fig.5 The schematic diagram and model of self-powered intelligent vibration damping 1/4 suspension
式中,mb为 1/4 车身质量,mt为车轮质量,ks为悬架弹簧刚度,kt为轮胎刚度,sr为路面位移,st为车轮位移,sb为车身位移,e3为电压放大系数.显然可见,采用自供能智能减震器的悬架系统是一个比较复杂的非线性系统,这使得自供能智能减震器应用一些控制方法会比较困难,如线性最优控制(Linear Quadratic Gaussian,LQG)等.
目前一些学者采用将俘能电压直接(或电路整流放大处理后)加载到智能阻尼器,实现自反馈控制,如赵晓鹏等[16]提出设计制作电流变液与压电材料复合的自耦合阻尼器,实验证明用压电材料和ER流体复合起来形成自反馈的控制系统是可行的.自反馈控制简单,易于实现,但它只是实现了随着振动幅度增加阻尼器阻尼系数和刚度增加,没有考虑悬架不同动态环境下对阻尼变化的要求.所以在单纯的自反馈耦合控制中引入主动控制或半主动控制策略是很有必要的.
Karnopp D[17]对车辆悬架的半主动控制进行了研究.其研究结果表明,若以ṡb表示悬架质量(车身)速度,ṡt表示非悬架质量(车桥)速度,c表示阻尼系数,则Karnopp控制规则的数学表达式为:

该控制规则表示要对作用在弹簧上且正比于车身绝对速度ṡb的振动进行抑制.将自供能智能减震器的自反馈耦合控制中引入Karnopp控制规则,则意味着当车身速度向上,对悬架的伸张进行抑制,且抑制的强度与自供能电压相关,即与伸张的速度相关;当车身速度向下,则对悬架的压缩进行抑制,且抑制的强度与自供能电压,即与压缩的速度相关.当车身速度向上悬架压缩和车身速度向下悬架伸张时,不加载电压.在不需加载电压时俘获的振动能量可以存储,用于其他元器件功能.引入Karnopp控制规则的自耦合控制可以描述为:

3 仿真结果与分析
利用Matlab/Simulink软件,根据所建半主动悬架1/4整车模型的动力学微分方程以及所获取的参数建立仿真模型,将设计的自耦合控制策略的控制效果与单纯自反馈控制和目前广泛采用的被动悬架控制效果进行比较,仿真参数如表3.
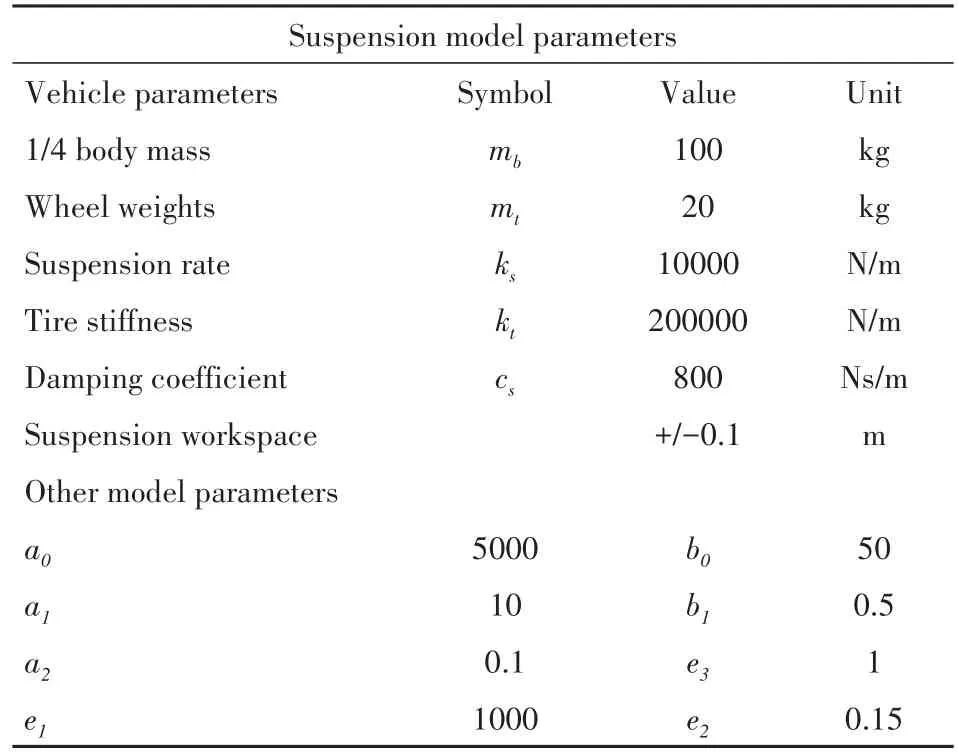
表3 仿真参数Table 3 Parameters used in Simulink
采用脉冲信号模拟路面垂向冲击,比较被动控制、单纯自反馈控制和引入Karnopp控制规则的自耦合控制(开/关自反馈控制)下的轮胎动位移、悬架动行程和车身加速度,如图6所示.尽管自反馈控制下轮胎动位移和悬架动行程相对被动控制下减小较少,但影响乘坐舒适度的车身加速度却有明显减小.而被动控制下车身加速度会产生较大的峰值,而自反馈控制却大幅减少车身加速度的峰值.而引入Karnopp控制规则的自耦合控制(开/关自反馈控制)相比单纯的自反馈控制,车身加速度的峰值减少几乎一半,所以自耦合控制能显著减缓行驶中遇到的路面冲击,提高乘坐舒适性.
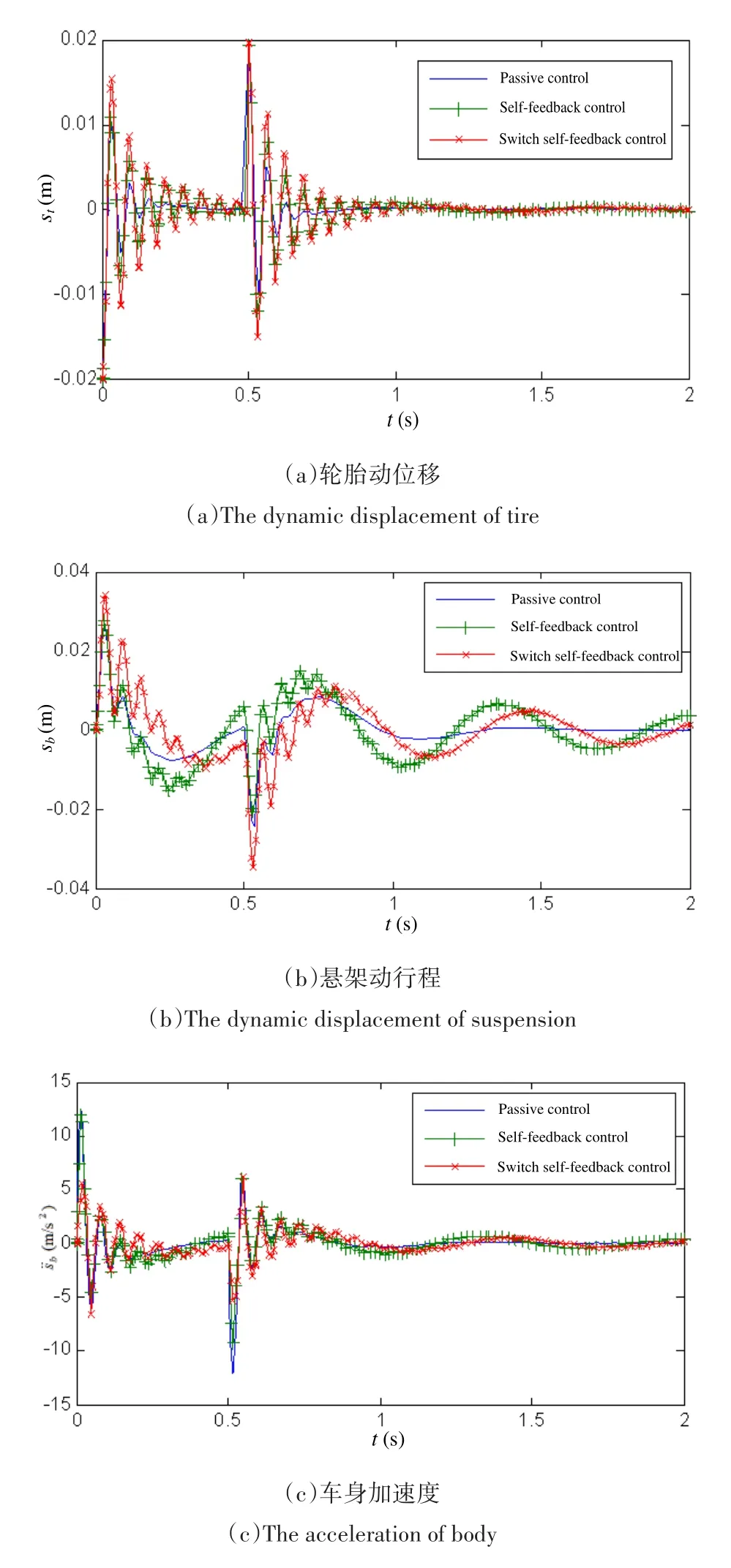
图6 不同控制方式下的乘坐舒适性对比Fig.6 The comparison of drive comfort under different control modes
4 结论
本文基于四轮独立轮毂电机电动汽车减震需求,设计了一种自供能减震器,并建立了自供能与智能阻尼器模型,以使得对自供能智能减震器的控制研究更加真实可靠.针对自供能智能减震悬架1/4整车模型及引入Karnopp控制规则的自反馈耦合控制策略,通过在脉冲信号模拟路面垂向冲击的仿真试验,并与在被动控制、单纯自反馈控制下的仿真结果做对比,可见该模型的轮胎动位移、悬架动行程以及车身加速度有不同程度的减小,特别是影响车辆乘坐舒适性的关键参数车身加速度有了明显改善,其峰值加速度减少近一半,说明该控制策略可以实现对该自供能智能减震悬架1/4整车模型运动性能的优化控制,能够有效减缓车辆受到的路面冲击.为了进一步优化控制效果,并能将其应用于工程实际,需要进行实验测试.自供能智能减震器自耦合控制对提升车辆驾驶舒适性以及燃油经济性有着重要作用,同时有利于推动车辆能效优化、智能控制、能量采集等方面的应用与产业化.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
设备管理与维修(2022年21期)2022-12-28
弹性体(2021年6期)2021-02-14
工业安全与环保(2020年10期)2020-11-05
汽车实用技术(2019年5期)2019-03-22
四川建筑(2018年4期)2018-09-14
材料科学与工程学报(2016年1期)2017-01-15
橡胶工业(2015年3期)2015-07-29
噪声与振动控制(2015年4期)2015-01-01
科技视界(2014年7期)2014-08-15