基于镜像修正FxLMS控制算法的船舶管路振动主动控制
2024-01-15 05:55刘学广谭鉴吴牧云张二宝闫明刘济源
哈尔滨工程大学学报 2024年1期
刘学广, 谭鉴, 吴牧云, 张二宝, 闫明, 刘济源
(1.哈尔滨工程大学 动力与能源工程学院, 黑龙江 哈尔滨 150001; 2.伦敦大学学院 机械工程系, 伦敦 WC1E 6BT)
船舶在正常运行过程中,船舶管路内部流体的流速或压力发生变化时会引起管路振动,而管路在承受外部激励作用时,也会对管路造成影响[1]。为了减小振动给船舶管路带来危害,常使用主动控制方式来控制振动[2]。
在振动主动控制系统中,传统的FxLMS控制策略具有算法简单、易于实现等优点,但也存在着控制收敛慢,需在控制前进行通道辨识等缺点[3]。而且在船舶承受外来冲击时,控制系统次级通道会发生突变,引起控制削弱或失效。所以应采用次级通道在线辨识的方法来满足船舶管路控制系统的稳定性。
常用的2种在线辨识方法:在控制输出端叠加噪声和利用控制信号本身进行次级通道辨识[4-5]。Erikssn通过运用叠加噪声直接进行次级通道的LMS辨识,研究表明在线辨识的收敛速度远小于离线建模[6],但辨识精度不太准确。Lopes等通过对叠加噪声的整体建模算法进行研究,验证了该算法在次级通道变化时,能够快速收敛且控制效果稳定[7],但叠加噪声的次级通道在线辨识方法中所加噪声会在控制后的信号中成为残差,削弱了控制效果。Kuo等[8]提出整体建模法,利用参考信号和输出信号进行次级通道的在线辨识,但由于参考信号和输出信号相关,所以辨识结果不稳定。
为实现船舶管路振动的有效控制及控制稳定的目的,本文在FxLMS算法和整体建模算法的基础上进行研究,实现了MMFxLMS算法控制策略的设计,通过仿真实验和管路振动主动控制实验,对比FxLMS算法,验证了本文所提出的MMFxLMS控制策略的控制性能。
1 MMFxLMS控制算法
1.1 FxLMS算法
在传统LMS算法中,根据最陡下降法的原理进行推导,将在离线辨识次级通道的基础上,结合误差信号e(n)和参考信号x(n)对低频振动信号进行控制,具有算法简单、易于实现等优点,但也存在着控制效果差、收敛速度慢等缺点。

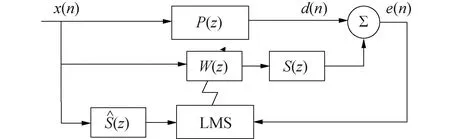
图1 FxLMS算法框图Fig.1 FxLMS algorithm block diagram
该算法的缺点在于需在控制过程之前,进行次级通道的辨识,并将辨识结果代入算法中。
FxLMS算法的迭代过程可概括为:
2)e(n)=d(n)-STY(n)
3)W(n+1)=W(n)+2μX′(n)e(n)
4)X′(n)=[x′(n)x′(n-1)…x′(n-L+1)]T

1.2 OMA控制算法
整体建模算法的流程框图如图2所示,利用输出信号y(n)和参考信号x(n)进行初级通道P(z)和次级通道S(z)的在线辨识。为实现通道辨识的快速收敛和稳定,采用了归一化LMS算法辨识。

图2 整体建模法流程Fig.2 Overall Modeling algorithm block diagram
其中在线辨识的理论推导如下。
其中2个滤波器的权向量增量为:
(1)
并且约束条件为:
(2)
根据拉格朗日数乘法,可得出目标函数为:
(3)
将目标函数分别对2个通道求偏导,再置0,即:
(4)
化解可得到在OMA结构中通道的迭代公式:
(5)
将式(5)代入约束条件,可得误差信号的迭代过程:
(6)
化解后可得:
(7)
代入式(5),并引入控制失调的固定步长因子μ,可得2个通道的迭代公式:
(8)
因此,结合整体控制流程和在线辨识过程,整体建模算法的迭代过程可概括为:
1)y(n)=-XT(n)W(n)
2)e(n)=d(n)+YT(n)S(z)
1.3 MMFxLMS控制算法
MMFxLMS算法框图如图3所示,其相比较于传统的FxLMS算法,其优点在于能够很好地实现初级通道和次级通道的在线辨识,并且通过镜像系统对控制权向量进行迭代,使整个系统更加稳定[12-13]。

图3 MMFxLMS算法框图Fig.3 MMFxLMS algorithm block diagram
(9)
(10)

(11)

MMFxLMS算法的迭代过程可概括为:
3)Y(0),X(0),X′(0)=0
4)y(n)=-XT(n)W(n)
1.4 MMFxLMS算法仿真
根据MMFxLMS控制算法的流程框图及迭代公式,进行相应的仿真计算。设定正弦信号为参考信号 ,其中振动频率设定为实验室中电机基频50 Hz。算法仿真过程中,应用了归一化LMS算法,使收敛步长可以根据输入信号进行相应变化,能够进行较快的收敛,所以输入输出信号的初始值不能设为0,防止仿真过程中算法直接发散。同时导入实际的100阶初级通道P(z)和次级通道S(z)来减小仿真结果误差。为了验证镜像系统的作用,在仿真过程中选取一个时间节点将次级通道进行较大的调整。窄带信号输入下收敛仿真结果如图4所示。

图4 窄带信号算法仿真Fig.4 The simulation diagram for narrow-band signal
由图4可以看出在输入的参考信号为窄带正弦信号的情况下,系统可以进行很好地收敛,同时再经过一段时间,次级通道发生突变后,系统并没有发散,而是在镜像系统的作用下进行快速的收敛。
改变输入参考信号为白噪声信号,OMA系统的辨识步长和权向量迭代步长都设为0.001;在其他参数不变的情况下,进行仿真实验。收敛仿真结果如图5所示;振动强度仿真图如图6所示。
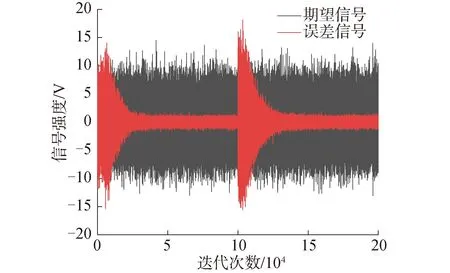
图5 白噪声信号仿真Fig.5 The diagram for white noise signal simulation

图6 振动强度仿真Fig.6 The simulation diagram for vibration amplitude
由图5和图6可以看出,经过一段时间的迭代后,误差信号e(n)相比较于期望信号d(n)衰减至较小值。次级通道发生突变后,控制失效,但系统继续迭代,直至误差信号收敛至最小值。
在仿真过程中,信号的振动强度在算法的作用下可进行有效的控制,而MMFxLMS算法相比较传统FxLMS算法,可直接进行初级通道和次级通道的在线辨识。在未收到外界冲击时,即次级通道未发生突变,初级通道和次级通道的辨识结果如图7所示。
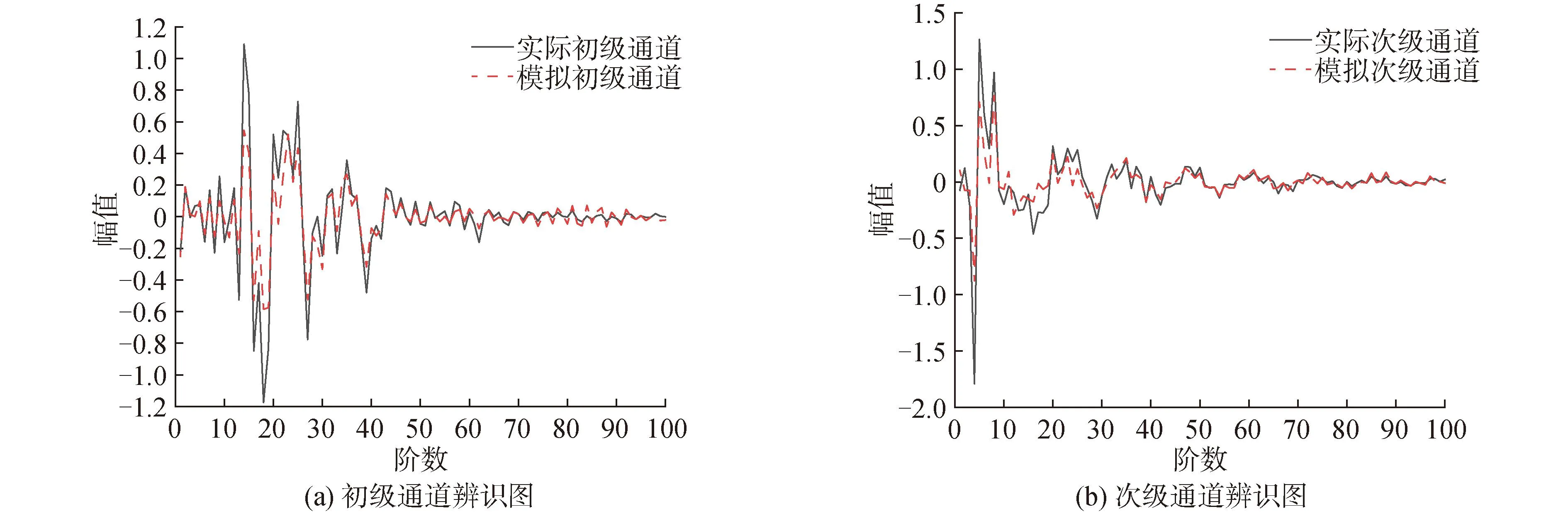
图7 冲击前通道辨识图Fig.7 The channel identification diagram before impact
从初级通道和次级通道的辨识结果可以看出,效果较好,能够实现在线辨识的目的,结合振动强度控制效果图,可得出在未受到外来冲击影响时,该算法可进行良好的振动主动控制。
当系统受到外界冲击时,即次级通道发生变化,从振动强度仿真图可以看出,控制失效。但系统继续迭代,初级通道和次级通道进行即时的在线辨识,重新辨识的结果如图8所示。

图8 冲击后通道辨识图Fig.8 The channel identification diagram after impact
从图8可以看出,当发生外界冲击时,次级通道发生了巨大的改变,而系统立即进行相应的通道辨识,辨识结果较好,在系统控制失效时,通过在线辨识,在重新辨识出初级通道和次级通道的基础上,可立即进行振动控制。
从2种不同参考信号输入的收敛情况和冲击前后在线辨识结果情况可以看出,得到良好的控制效果后,次级通道发生突变,但系统并未直接发散,而是继续进行迭代,在一段时间后,仍能产生良好的控制效果。
所以针对单频正弦信号或白噪声信号作为参考信号输入时,MMFXLMS算法都可以取得很好的振动控制效果。
2 管路振动系统及控制策略设计
为了进一步验证MMFXLMS算法的控制性能,在仿真结果的基础上,本节搭建了电机转动带动管路振动的实验系统。
2.1 管路振动实验台架
实验台架如图9所示,整个实验台架系统由进出口管路、电机、泵、作动器、功率放大器和控制系统组成。选取振动强度较大的进水管作为控制点,在进口管路安装采集振动信号的加速度传感器以及产生控制作用的作动器。

图9 实验台架Fig.9 Experimental bench
2.2 管路主动控制实验系统
管路振动控制策略的控制效果需由管路振动实验进行验证,电机转动以及管路中水的流动引起系统振动,利用光电转速传感器采集电机转速信号作为参考信号x(n),利用加速度传感器采集进水管路振动信号作为误差信号e(n),参考信号通过滤波器后与期望信号输入控制器中,控制器输出信号y(n),通过功率放大器,给予作动器相应的的振动信号。
整体系统中,电机选用江苏振华生产的65CL-45A型船用立式离心泵,转速控制为50 Hz;进水口管路外径为76 mm;作动器选用最大出力达250 N的电磁作动器;加速度传感器选用KISTLER加速度振动传感器;控制板选用TMS320C6748控制芯片和相应的外围电路,同时利用PULSE监测管路的振动状态和控制器输出给功率放大器的信号。
2.3 控制策略设计
在控制器中,输入的滤波参考信号和期望信号通过AD转换器,由模拟信号转换为数字信号,在控制中进行算法迭代,在辨识初级和次级通道的同时,在镜像系统中进行权向量的迭代,控制板输出信号,经DA转换器输出给功率放大器。
将算法迭代过程进行相应C语言程序编写,控制程序流程图如图10所示。

图10 控制程序流程Fig.10 The control program flow chart
控制程序中自适应滤波器W(z)、数字滤波器P(z)、S(z)的阶次设为256阶,控制算法中的步长因子在满足收敛性的范围内,为了使控制收敛速度更快,优先选择较大值,经仿真调试后,设定镜像系统中权向量迭代的步长因子为0.002 5,整体建模系统中对初级通道和次级通道辨识的步长因子为0.01。
同时为对比分析MMFxLMS与FxLMS 2种算法,在相同工况条件下,使用FxLMS算法进行实验,设置权向量迭代的步长因子为0.004。
3 实验结果及讨论
为了检验所设计的MMFxLMS控制策略对管路振动响应的控制性能,利用电机带动管路水流动,从而引起管路振动,先进行管路未受控制时加速度响应信号的测量,再开启控制器,待控制稳定时,记录管路控制后的加速度响应信号。
图11为采用MMFxLMS控制前后管路振动强度图,对比看出,在频域控制图中,电机转速控制在50 Hz时,未控制时由电机带动管路振动的强度为127.24 dB,通过控制后,50 Hz的振动强度降为107.68 dB,降低了19.56 dB,降低了15.37%。时域控制图是经过低通滤波器后的振动响应,明显对比出,控制后低频振动的响应小于未控制的振动响应。
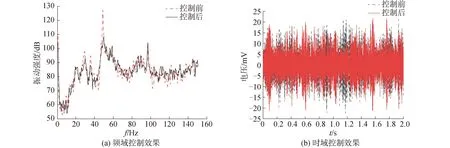
图11 MMFxLMS控制效果图Fig.11 MMFxLMS control effect diagram
图12为基于FxLMS控制算法在相同工况下进行试验后所得到的频域和时域控制效果图,在50 Hz处控制前振动强度为126.89 dB,控制后振动强度为108.92 dB,降低了17.97 dB。而从时域控制图中可以看出进口管路的振动强度并未得到太大改变,控制前后振动强度相似。
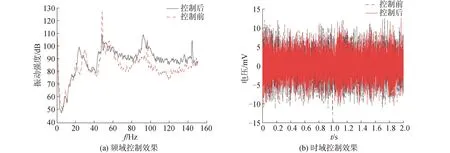
图12 FxLMS控制效果图Fig.12 FxLMS control effect diagram
对比FxLMS控制试验效果和MMFxLMS控制试验效果,在相同工况下,MMFxLMS控制策略控制效果比FxLMS的强8.85%;同时,从频域控制效果可以看出FxLMS控制策略虽然能有效控制基频振动,但基频之上的频率振动强度却增强了。而MMFxLMS控制策略没有这样的缺陷,能够有效控制基频振动,不会增强高频振动。可分析出MMFxLMS控制策略在控制前后有较强的振动控制效果。
管路振动主动控制实验结果表明,MMFxLMS控制策略对于由海水泵转动引起的管路振动,具有很好的控制效果。
4 结论
1)基于MMFxLMS算法,设计一种新的管路振动控制策略,能够实现初级通道和次级通道的快速稳定辨识,同时通过模拟真实控制系统,在镜像系统中迭代权向量。并通过对MMFxLMS算法进行仿真试验,验证了在船舶管路遇到外来冲击时,控制系统次级通道发生突变,该控制策略可再次快速稳定收敛。
2)通过管路振动主动控制实验,验证了MMFxLMS控制策略的控制效果,在由电机转动引起的管路振动,能够达到很好的控制效果,振动强度降低了19.56 dB,降幅达15.37%,比FxLMS控制算法强8.85%。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
成都信息工程大学学报(2021年5期)2021-12-30
民用飞机设计与研究(2020年1期)2020-05-21
山西冶金(2019年2期)2019-05-31
制造技术与机床(2017年6期)2018-01-19
电源技术(2015年9期)2015-06-05
河北科技大学学报(2015年5期)2015-03-11
太空探索(2014年4期)2014-07-19
电测与仪表(2014年2期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01