雾天桥梁可变限速值的效用评估及优化
2024-02-15 03:04张建华赵晓华欧居尚栾森戴义博
华南理工大学学报(自然科学版) 2024年1期
张建华 赵晓华 欧居尚 栾森 戴义博
(1.北京工业大学 城市建设学部,北京 100124;2.四川警察学院 智能警务四川省重点实验室,四川 泸州 646000)
桥梁作为跨江、跨海的交通纽带及保障公路快速通行的重要手段,其建设规模也在不断扩大。截至2020年底,我国公路桥梁数量已超过90万座[1]。研究表明,桥梁交通事故一般多发于雨、雪、大雾等天气条件[2]。相较于普通路段,由于桥梁结构的半封闭性及桥梁复杂多变的行车环境,桥梁路段一旦发生交通事故,极易造成拥堵,甚至可能导致二次事故发生。2020 年11月,陕西包茂高速关庄立交桥面由于雾天发生了43 车接连相撞的重大交通事故。由此可见,桥梁作为公路特殊路段,其安全治理和风险防控问题亟待解决。研究显示,超过90%的交通事故是人为因素导致的[3],因此,改善雾天桥梁驾驶行为特性,对缓解交通运行安全隐患问题极为重要。
从交通运营安全方面看,现阶段研究主要集中在事故特征、运行效率及驾驶行为及其之间的关联关系。事故特征方面,黄冰娥等[2]通过事故统计资料,分析桥梁事故的时空、形态分布与天气状况之间的关系;王文治等[4]通过杭州湾大桥交通事故数据,探究交通事故与车型、道路环境、气候因素的关系,并指出雾天等不良天气会对桥梁行车安全产生严重影响。运行效率方面,袁观虎[5]通过构建桥梁运行状态评估模型对其安全运营效率进行评价。驾驶行为方面,现有研究大多为强侧风对桥梁行车安全的影响[6],并通过横风强度确定安全行车阈值[7]。然而,雾天作为桥梁交通运行安全风险的重要致因,从驾驶行为角度出发,其防控措施及改善策略的相关研究较少。雾天桥梁上的能见度低,高速行驶的车辆更容易发生事故,一旦遇到紧急情况驾驶人往往无法及时反应,容易发生追尾等事故。限速能够使驾驶人有更多的时间做出反应以应对突发情况。同时,其他研究也表明,限速标志能够有效改善公路雾区驾驶行为,减轻事故严重程度[8]。因此,限速作为改善交通运行安全的有效措施,有必要探究限速措施对雾天桥梁运行安全的影响及效能。
可变限速标志(VSL)作为常见的道路交通设施,能够在恶劣天气、交通事件、桥梁和隧道等路段进行有效的速度控制[9]。事实上,国内外针对VSL 进行了大量的研究。Martínez 等[10]基于实测数据研究了可变限速标志设置区域,以防止下游瓶颈路段拥堵;张珊等[11]通过实测数据和仿真实验提出了一套雾天可变限速控制方法,该方法可有效保障行车安全和通行效率;孙长乐等[12]通过分析可变限速作用下的公路特性,提出了一套可变限速交通流模型;Zhao等[13]基于驾驶模拟器开发了车联网环境下的可变限速应用程序,在雾天条件下,车联网可变限速能够有效地降低雾区车速。这些研究明确指出了可变限速对速度控制的有效性,主要通过改善驾驶人对车速的控制能力来提升交通运行的安全性。可见,研究桥梁可变限速的作用效果,应充分考虑驾驶人的真实反映。目前,国内外针对VSL的研究主要采用实车测试、仿真实验和理论推导等方法。实车测试虽然考虑了人的属性,但出于安全、成本原因,很难实现全面分析;仿真实验和理论推导无法描述复杂的驾驶行为。而驾驶模拟器作为一种有效的实验工具[14],能够很好地控制外部因素(天气条件、道路环境、交通状态等)的影响[15-17]。针对桥梁而言,天气条件、道路环境及交通流组成等因素均为控制变量,通过科学实验设计和细粒度数据感知,可实现可变限速作用规律和特征表现,为进一步揭示其影响特性提供支撑。
为探究雾天桥梁环境下可变限速对驾驶人的影响,文中通过驾驶模拟实验测试,获取细粒度微观驾驶行为数据,从驾驶人服从效应角度提出了量化评估体系,以实现可变限速策略的综合评估及最优策略甄选。
1 驾驶模拟实验
1.1 系统实验平台
为研究雾天条件下可变限速标志对桥梁驾驶行为的影响,文中采用AutoSimAS驾驶模拟器进行模拟实验。驾驶模拟器主要由控制系统、显示系统和车辆系统3部分组成。控制系统是平台核心,用于实现实验系统的设计、控制、监控和记录等功能,具有动态开放编程接口,可根据实验需求,利用脚本语言控制其他车辆的运行状态、时间、天气及突发事件等情景;显示系统主要为驾驶人提供虚拟3 维驾驶场景;车辆系统实现人机对接,为驾驶人提供驾驶操作平台,实现逼真的车辆驾驶感受。道路场景投影在3 块1 920 像素×1 080 像素显示屏上,投影设备为驾驶人提供前方130°的水平视野。实验设置以20 Hz 的频率记录车辆运行状态、驾驶人操作特征、车辆运行环境特征等数据,其中车辆运行状态参数包括速度、加速度、油门、刹车、车辆坐标等。同时已有研究从驾驶人的视觉[18]、驾驶行为[19]和生理[20]方面对驾驶模拟器的有效性进行了验证,并采用问卷调查的方法从主观感受[20]评价驾驶模拟器的真实性,结果表明驾驶模拟器具有相对有效性。驾驶模拟器和实验场景如图1所示。

图1 驾驶模拟器及实验场景Fig.1 Driving simulator and experimental scene
1.2 场景设计
文中研究以鄂东长江大桥为设计原型。鄂东大桥为连接国家高速G45、G50 的重要组成部分,地处南方区域,且位于长江之上,故经常出现影响高速公路正常交通状况的低能见度天气。桥面设计为双向六车道高速公路,桥面净宽33 m,整体限速为100 km/h。考虑到雾天低能见度对驾驶行为的影响,实验设计桥梁上的能见度为100 m。相关研究表明,雾天高速公路的交通状态一般多为自由流[21]。为避免交通流对实验结果产生干扰,文中依据《公路通行能力手册》自由流交通密度6 pcu/(km·车道),设计交通流平均车头间距为超过175 m 的自由流。实验场景设计如图2所示。
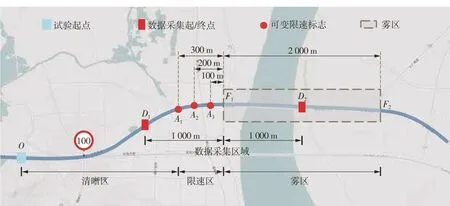
图2 鄂东长江大桥实验场景设计Fig.2 Experimental scene design of E’dong Yangtze River Bridge
由图2可知,实验路段分为正常路段、限速区及雾区。正常路段(清晰区,OA1)设计车速为100 km/h,长度为2 km,保证车辆有足够的距离加速到正常行驶水平。限速区(A1F1)长度为300 m,参照《公路限速标志设计规范》(JTG/T 3381-02—2020),相邻两个限速路段的限速值之差不应大于20 km/h,限速标志采取逐级降速方式。雾区(F1F2)全长2 km,能见度设置为100 m。为探究不同限速水平对驾驶行为的影响,文中实验共设计3组限速策略SⅠ、SⅡ和SⅢ,具体设置如表1所示。
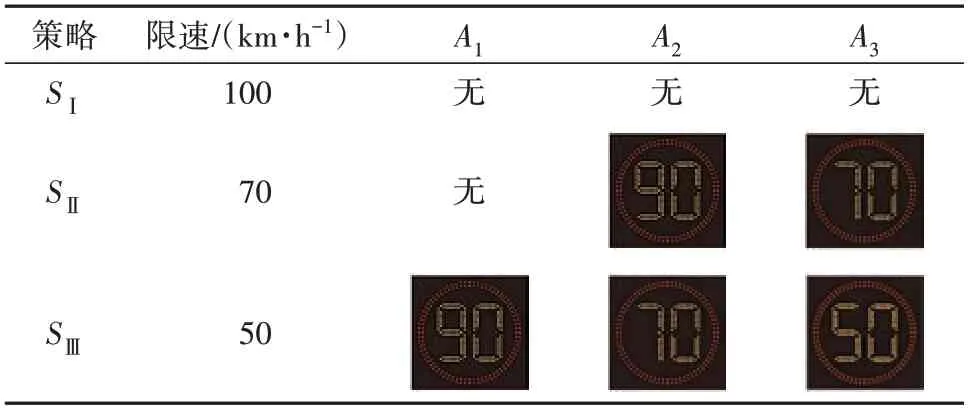
表1 可变限速标志具体设置Table 1 Specific setting of variable speed limit sign
1.3 被试选择
本研究共招募了31 名(21 名男性,10 名女性)参与者作为被试来完成模拟实验,参与者年龄分布在22~64 岁(均值为30.9,标准差为9.6)之间,视力或矫正视力正常,均持有有效的驾驶执照且至少有1年以上驾驶经验。所有被试均要求按照日常驾驶习惯进行模拟实验,且未提前被告知本次实验的研究目标。样本量n的选取是获得足够实验数据的关键,本研究从统计学上解决样本量是否满足要求,具体计算公式为
式中:zα/2为标准正态分布上α/2 分位统计值;zβ为标准正态分布上β分位统计值;β为正态分布总体标准差;ε为响应指标均值与参考值的差值,ε=±σδ,σ为正态分布的标准差,δ为有意义差异。
由于驾驶模拟实验的人数限制,通常选择10%的显著水平来反映未知参数的90%置信水平。此外,为了平衡效度和成本效益,文中使用80%的效度和0.5 的有意义差异[22]。结果表明,研究所需的最小样本量为25。文中被试数量超过研究所需样本量,具有统计学意义,能够为实验研究提供可靠的数据支撑。
1.4 实验步骤
基于驾驶模拟技术开展雾天桥梁驾驶测试,实验由5部分组成:①测试前基本信息采集,被试填写基本信息表,记录被试的年龄、性别、驾龄等人口统计学信息;②实验说明,对被试宣读指导语,介绍实验目的(为了研究不同条件下的日常驾驶行为)以及驾驶模拟器操作规程,并要求被试按照日常驾驶习惯操作模拟器;③预实验,选用非正式实验场景进行预实验,使被试能够熟悉驾驶模拟器操作,并测试被试是否适应驾驶模拟环境;④正式实验,为了避免学习效用,每位被试以随机顺序分别开展3 次驾驶实验SⅠ、SⅡ和SⅢ,实验之间间隔5 min;⑤测试后问卷调查,被试填写问卷,记录驾驶人对于场景、操作的主观感受及真实性评价。
1.5 数据预处理
通过驾驶模拟器测试采集每位被试微观驾驶行为数据,按照清晰区、限速区及雾区对原始数据进行筛选和预处理。参照《高速公路LED 可变限速标志》(GB 23826—2009),考虑驾驶人的动态视认距离不低于210 m,清晰区的数据截取长度为200 m,以确保雾区或限速标志对驾驶行为开始产生影响。对照组SⅠ没有限速区,实验组SⅡ限速区长度为200 m,SⅢ限速区长度为300 m。考虑低能见度对驾驶行为的影响,并结合雾区内驾驶人速度和加速度的空间分布特征,进入雾区500 m 后驾驶人的速度达到相对稳定的状态,故雾区的数据截取长度为500 m。实验获取31位驾驶人在3个限速策略下清晰区、限速区和雾区内的248 条驾驶行为数据,包括速度、加速度、方向盘转角、刹车、油门等,并以5 m 为单元获取驾驶人空间维度数据[16]。
2 限速策略效用评估方法
车辆速度[23]特性能够直接反映出道路上车辆运行的动态规律,也是运行速度预测的基础。为了探究不同限速策略对驾驶行为的影响,本研究首先采用单因素重复测量方差分析法和配对T检验法分析不同限速条件下车辆进入雾区前后运行状态的变化情况;然后,将反馈控制理论迁移至可变限速有效性分析,从驾驶人服从效应角度提出评价指标体系;最后,基于模糊综合评价对不同限速策略进行评价。
2.1 服从效应指标体系构建
由于人的一切活动都体现了反馈控制原理,且人本身就是具有高度复杂控制能力的反馈控制系统[24],因此将驾驶人响应可变限速标志而采取的行动视为控制系统响应过程,如图3所示。其中,驾驶人大脑思考过程视为控制装置,驾驶人操作行为视为被控对象,可变限速标志为输入变量,车速为输出变量。驾驶人在观察到限速标志后,会根据车辆运行状态及人为因素采取相应的控速措施,并将实时获取的车速作为反馈信息,用以不断调整实际车速与期望水平之间的偏差,从而研究人为因素(扰动作用)引起驾驶操作(被控量)变化的全过程,如图4所示。从驾驶人服从效应角度提出了包含响应快速性、稳定性和准确性3 个层面的评价指标体系,探究不同限速方案的作用机理及特征表现,具体映射关系如表2所示。
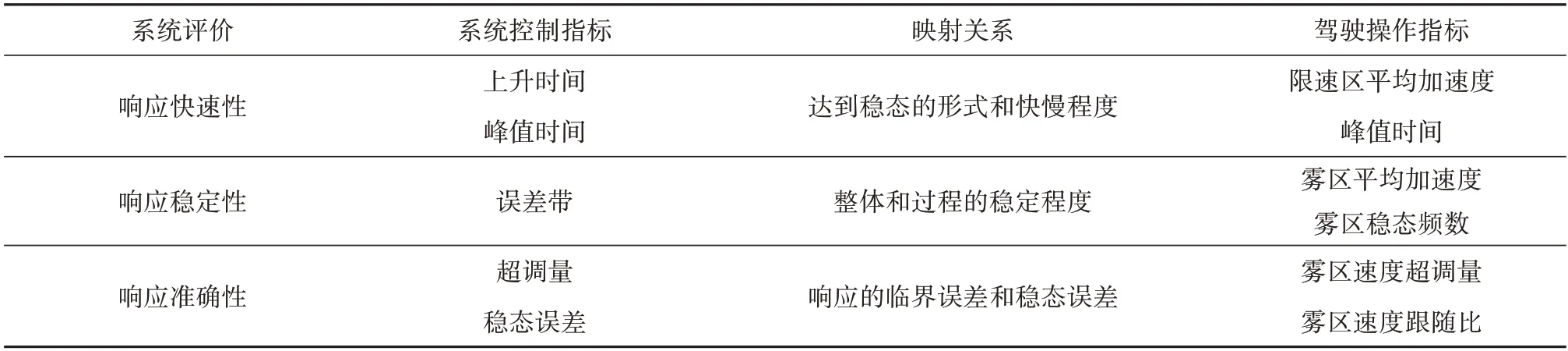
表2 驾驶操作映射关系Table 2 Mapping relationship of driving behavior
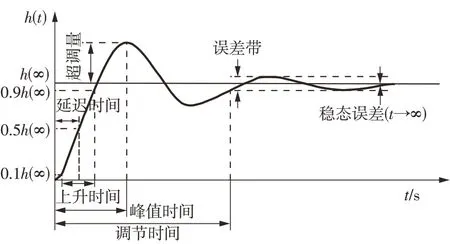
图3 控制系统响应过程Fig.3 Response process of control system
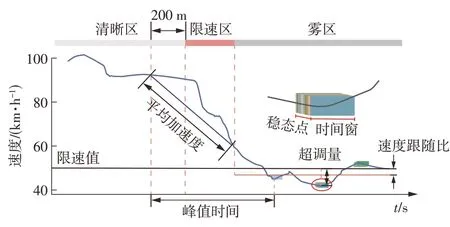
图4 驾驶人速度变化过程Fig.4 Driver’s speed change process
限速区平均加速度al指车辆进入雾区的初始速度与距雾区500 m 上游的速度差值与行程时间的比值,代表驾驶人针对不同限速策略响应形式的激烈程度。该值越小,说明驾驶人进入雾区前的响应越快速。其计算公式为
式中,vs,c为清晰区内车辆距雾区500 m上游的速度,ve,l为驶离限速区的车速,t为在限速区内的行程时间。
峰值时间tp指车辆从距雾区500 m 上游车速到达第一个低峰值的行程时间。该值越小,说明驾驶人在雾区行驶过程中第一次调整至期望运行状态所需的时间越短,响应越快。其计算公式为
式中,Ts,c为车辆到达距雾区500 m上游位置的时刻,Tp,f为车速到达第一个低峰值所对应的时刻。
雾区速度标准差vSD指车辆进入雾区后整体空间上的速度标准差,表示驾驶人进入雾区后整体速度的波动程度,该值越小说明进入雾区后驾驶人的整体稳定性越高。其计算公式为
式中,f为车辆雾区行驶过程记录频数,vi为在i记录点的车速,vˉ为雾区的平均车速。
雾区稳态频数Ns指车辆在雾区行驶过程中达到稳态的次数。实际驾驶过程中,由于雾区的低能见度、不断变化的道路和交通条件,驾驶人难以长时间保持车辆高速稳定运行。因此,本研究达到稳态的判别依据是连续5 s内速度波动不超过1 km/h即为一次稳态[25]。如表2所示,车辆会出现多次达到稳态的情况,以5 s 作为滑动时间窗逐点滑动,当满足条件时,标记为稳态点。Ns越大,说明车辆在雾区行驶过程中的稳定性越高。
雾区速度超调量σv指雾区中最小车速与限速值的差值,表示驾驶人在极端情况下偏离限速值的程度,该值越小说明极端情况下的服从性越好。其计算公式为
式中,vl为雾区中的限速值,vmin为雾区行驶的最小车速。
速度跟随比pf指雾区的平均车速与限速值的绝对误差比,表示驾驶人整体速度服从限速值的水平,该值越小整体的服从性越好。其计算公式为
2.2 模糊综合评价
模糊综合评价运用模糊数学的原理,基于模糊数学的隶属度理论将定性评价转化为定量评价。适合对具有多种属性的对象,或者受到多种因素制约的对象做出一个总体的评价[25]。具体的模糊综合评价实现步骤如下:
(1)确定评价指标集和评语集。构建指标集U={U1,U2,…,Um},将每项评价指标划分为好、较好、一般、较差和差5个评价等级,各项指标的评语集为V={V1,V2,…,V5}。
(2)建立评价矩阵。给定评价指标现状值λi,其允许范围为[api,bpi],[aij,bij]为各评价等级的取值区间,各评价指标不同等级的隶属度rij的计算公式为
(3)确定指标权重。熵权法是一种在综合考虑各因素提供信息量的基础上计算一个综合指标的数学方法,能较好地反映驾驶人在不同限速策略下的评价指标所包含的信息量,将各类指标融合在一起,可以解决信息量大、量化难的问题。根据各指标对评价对象的贡献程度给予相应的权重,得到指标权重向量W。
(4)计算评估结果。将权重向量W和归一化后的隶属度矩阵R进行模糊合成,得到模糊综合评价结果向量S,即
式中,◦为模糊合成算子。
3 实验结果与分析
3.1 运行状态影响分析
选取桥梁清晰区、限速区和雾区驾驶人的平均速度、速度标准差、平均加速度等参数,探究不同限速策略对驾驶行为的影响。通过方差分析、配对检验分别对桥梁清晰区、雾区和限速区不同限速策略下运行状态参数的显著性(P)进行分析,实验结果如表3所示。从表中可知:清晰区的速度标准差、平均加速度存在显著差异;限速区的平均速度和平均加速度存在显著差异;雾区的平均速度存在显著差异。
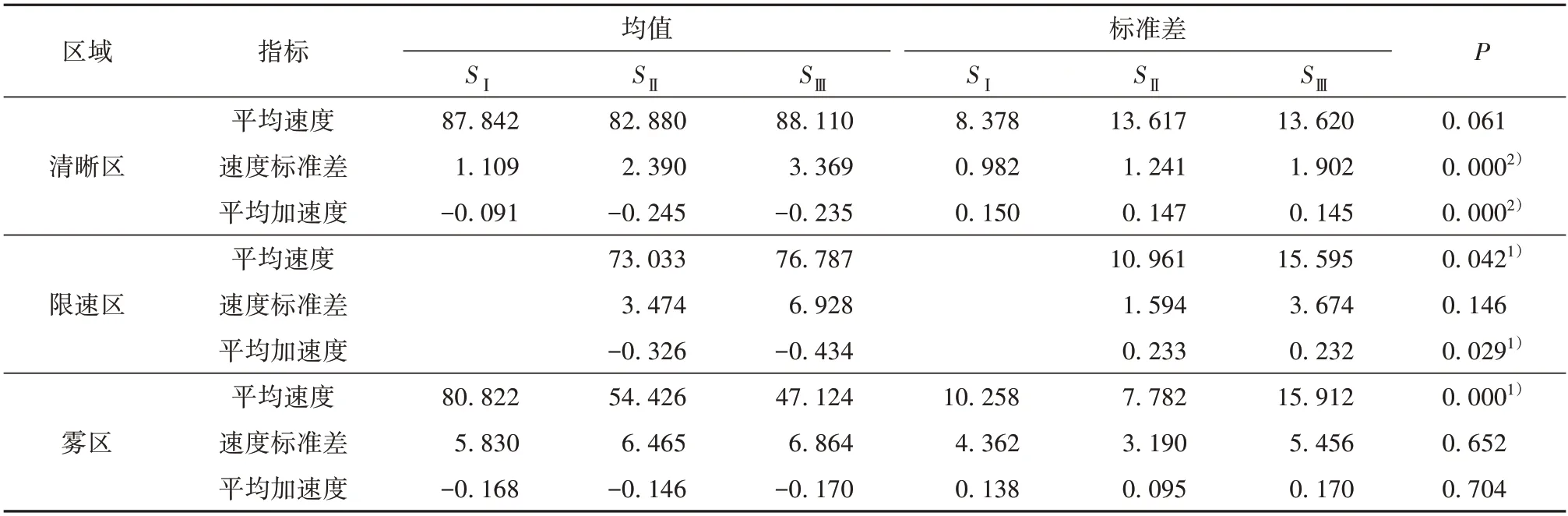
表3 不同区域驾驶参数的显著性分析结果Table 3 Significant analysis results of driving parameters in different zone
采用Bonferroni 校正事后方差分析法对桥梁清晰区、雾区和限速区不同限速策略下的运行状态参数进行配对检验,结果如图5所示。

图5 不同限速策略下的运动状态参数分布Fig.5 Distribution of motion status parameters under different speed limit strategies
从图5(a)中可知:在清晰区内,不同限速策略对平均速度没有显著影响(清晰区的整体显著性Pc=0.061);在限速区和雾区内,不同限速策略下的平均速度存在显著性差异(限速区、雾区的整体显著性Pl=0.042,Pf<0.001)。在雾区内,与SⅠ相比,SⅡ和SⅢ实验组的平均速度分别降低了26.396 km/h(P<0.001)、33.698 km/h(P<0.001),且实验组SⅢ的平均速度比SⅡ显著降低了7.302 km/h(P=0.025)。以上结果表明,可变限速策略能够有效调整驾驶人进入限速区和雾区后的速度。
从图5(b)可知:在清晰区内,与SⅠ相比,SⅡ和SⅢ实验组的速度标准差分别显著增加了1.281 km/h(P<0.001)、2.26 km/h(P<0.001),且SⅡ实验组的速度标准差比SⅢ实验组显著增加了0.979 km/h(P=0.033);在限速区和雾区内,SⅡ和SⅢ实验组与SⅠ的速度标准差没有显著性差异。结果表明,清晰区内不同限速策略的速度标准差变化具有显著性差异,这是因为驾驶人在看到限速标志后会采取减速策略,从而导致速度变化差异较大。
从图5(c)可知:在清晰区内,与SⅠ相比,SⅡ和SⅢ实验组的平均加速度分别显著降低了0.155 m/s2(P<0.001)、0.144 m/s2(P<0.001);在限速区内,SⅢ实验组的平均加速度比SⅡ实验组显著降低了0.109 m/s2(P=0.029);在雾区内,SⅠ对照组、SⅡ和SⅢ实验组的平均加速度无显著性差异。结果表明,不同的限速策略能够使驾驶人在清晰区提前采取减速措施,且不同的限速策略对限速区内的减速行为具有显著影响。
进一步对不同限速策略下驾驶人在清晰区、限速区和雾区内的空间显著性进行分析。以5 m为间隔,比较不同限速策略下驾驶行为的逐点显著性。图6显示了驾驶人在不同限速水平下平均速度、平均加速度的变化轨迹及其空间显著性(1 代表存在显著性差异,0代表无显著性差异),图中PSⅠ∶PSⅡ、PSⅡ∶PSⅢ、PSⅠ∶PSⅢ表示3组策略两两之间的显著性比较。车辆在1 000 m 位置处进入雾区,A1、A2、A3分别代表可变限速标志的位置。由图6(a)可以看出,与对照组相比,当车辆进入限速区范围时,可变限速对驾驶人的行驶速度开始产生了显著影响。由图6(b)可知:在距离可变限速标志(A1)100 m位置处,可变限速已对驾驶人的加速度产生作用,驾驶人在限速区和刚进入雾区时采取较大的减速措施,说明可变限速标志会使驾驶人更早地采取制动措施,从而保持以相对较低的速度进入雾区;SⅠ中的驾驶人更倾向在进入雾区200 m 后开始采取减速措施,雾区中驾驶条件、环境等不确定因素会使驾驶风险增大。

图6 不同限速策略下驾驶参数的空间分布Fig.6 Spatial distribution of driving parameters under different speed limit strategies
总体来看,在清晰区内,由于驾驶人提前感知限速标志,可变限速标志能够使驾驶人提前采取减速措施,对清晰区的速度变化具有显著影响。在雾区内,速度标准差和平均加速度没有显著差异,说明不同限速策略对雾区内的速度变化没有显著影响。从空间层面上看,可变限速标志能够使驾驶人更早地采取减速措施以应对雾区环境,同时限速策略下驾驶人在进入雾区后的整体速度变化相对较小,对照组则需要采取更大的制动措施来调整车速以应对雾天行驶环境。然而,不同可变限速对车辆进入雾区前后的运行状态存在一定的差异性,难以在工程应用中直接选取合适的限速策略,因此有必要进一步验证不同限速策略对驾驶行为的影响,进而选取有效的限速方案。
3.2 可变限速的有效性分析
从驾驶人响应的快速性、稳定性和准确性3方面对不同限速策略的有效性进行分析,结果如表4所示。由表中可知,不同限速策略下平均减速度、峰值时间、稳态频数、速度超调量和速度跟随比均存在显著差异,而雾区内速度标准差没有显著差异。
不同限速策略下驾驶人响应的快速性、稳定性和准确性比较如图7所示。从图7(a)可知:与SⅠ对照组相比,SⅡ和SⅢ实验组的平均加速度分别显著降低了0.603 m/s2(P< 0.001)、0.945 m/s2(P< 0.001),且SⅢ实验组的平均减速度比SⅡ实验组显著降低了0.342 m/s2(P=0.007),说明90~70~50 km/h逐级限速策略下,驾驶人对限速措施做出响应更加激烈;与SⅠ对照组相比,SⅡ实验组的峰值时间显著增加了10.321 s(P=0.006),SⅢ实验组则无明显差异,说明90~70 km/h限速策略下,驾驶人需要更长的时间才能达到稳定状态。

图7 不同限速策略下驾驶人响应的快速性、稳定性和准确性比较Fig.7 Comparison of driver’s response rapidity,stability and accuracy indicators under different speed limit strategies
从图7(b)可知:不同限速策略下,驾驶人在进入雾区后的速度波动没有明显差异;与SⅠ和SⅡ组相比,SⅢ组达到速度稳态的频数分别显著增加了214(P< 0.001)、134(P=0.028),说明90~70~50 km/h逐级限速策略下,驾驶人在雾区中行驶的稳定性更高。
从图7(c)可知:与SⅠ对照组相比,SⅡ和SⅢ实验组的速度超调量分别显著降低了9.23 km/h(P=0.004)、20.56 km/h(P< 0.001),且SⅢ实验组的超调量比SⅡ实验组显著降低了11.33 km/h(P<0.001);与SⅠ和SⅡ组相比,SⅢ实验组在雾区的速度跟随比分别显著降低了6.8%(P=0.008)、7.2%(P=0.002),说明90~70~50 km/h 逐级限速策略下,驾驶人在雾区行驶过程中对限速值的极端偏离程度和平均偏差程度更低,对限速条件的响应准确性更高。
3.3 桥梁可变限速模糊综合评价结果
文中以雾天桥梁限速策略SⅢ为计算案例进行说明。考虑驾驶人在不同限速策略下响应的快速性、稳定性和准确性,文中通过构建评价指标集对限速方案进行评估。
由于各类指标缺乏相应的分类参考,难以确定评价等级取值范围。因此,文中采用K-means 聚类算法计算各指标的聚类区间[26-27],以确定不同评价等级的取值范围,结果如表5 所示。根据式(7)对各评价指标的隶属度进行计算,形成评价等级隶属度矩阵,如表6所示。
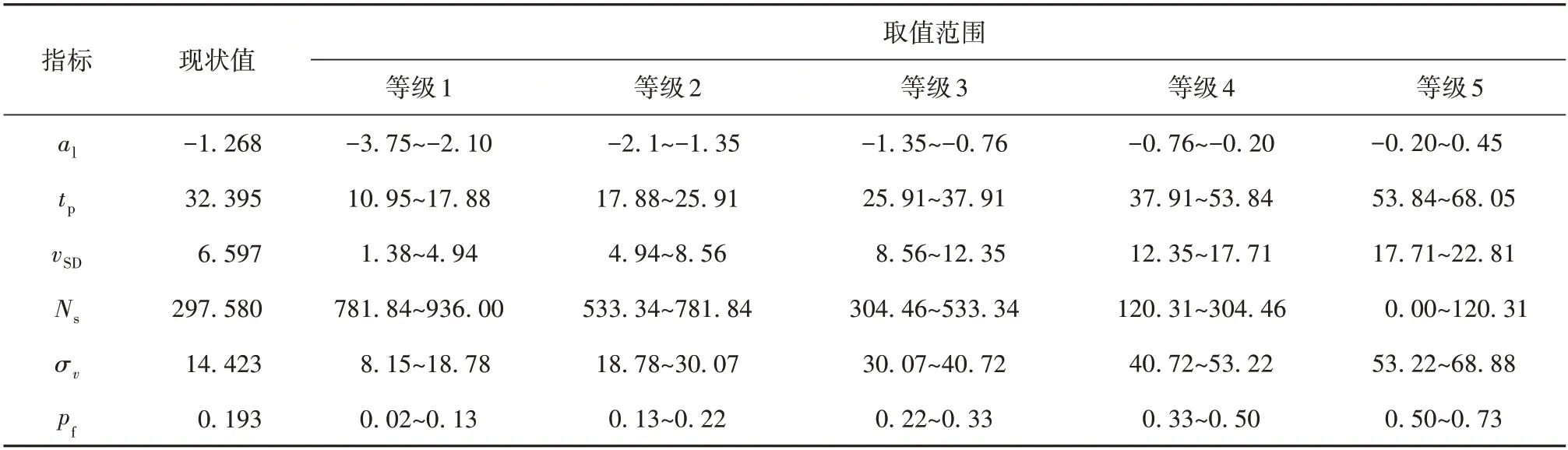
表5 可变限速评价指标等级取值区间Table 5 Level value ranges of variable speed limit evaluation indicators
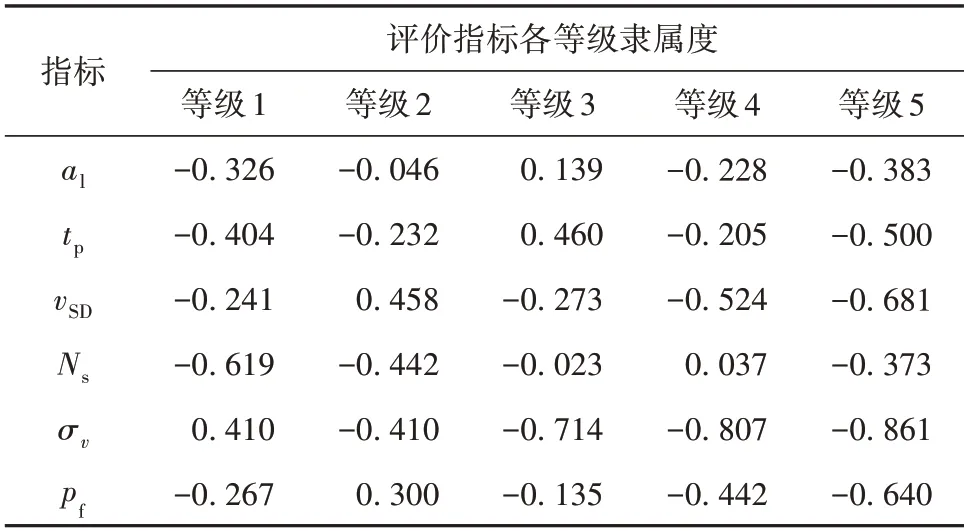
表6 评价指标隶属度矩阵计算结果Table 6 Membership matrix calculation results of evaluation indicators
通常情况下,反映限速方案有效性的评价指标之间并不是同等重要的,文中根据熵权法对评价对象的贡献程度给予相应的权重,各评估指标(al、tp、vSD、Ns、σv、pf)的权重分别为0.340、0.035、0.015、0.297、0.174和0.138。
文中采用加权平均型算子M(×,⊕)计算不同限速策略隶属于各评价等级的程度。定义各评价等级的分数梯度矩阵A=(90,80,70,60,50),则S和A的向量积为综合得分。模糊综合评估结果如表7所示。由表中可知,SⅢ实验组的综合评分最高,因此,综合驾驶人响应的快速性、稳定性和准确性3 方面的6 项评价指标,90~70~50 km/h 逐级限速策略为最优设置方案。即在雾天能见度为100 m 条件下,限速50 km/h 能够使车辆在桥梁区域运行的服从度和稳定性更高,整体运行效率更好,能够有效地缓解车辆进入雾区后产生波动,从而有效降低桥梁雾区驾驶风险。
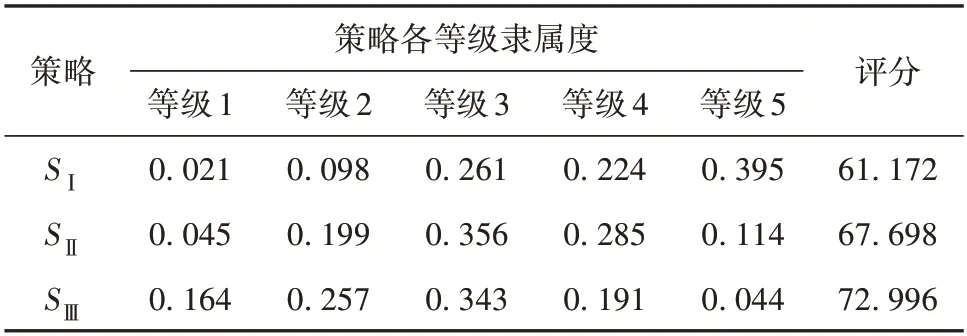
表7 不同策略的模糊综合评价结果Table 7 Fuzzy comprehensive evaluation results of different strategies
4 结语
文中依托驾驶模拟实验平台,实现不同限速条件下雾天桥梁场景微观驾驶行为数据的细粒度感知,分析可变限速对驾驶行为的综合影响;从驾驶人服从效应考虑构建评价指标体系,量化分析不同限速策略的作用机理和特征表现;最后采用模糊综合评价对不同限速方案进行评估,得到的主要结论如下:
(1)进入桥梁雾区前,可变限速能够使驾驶人更早地采取减速措施以应对雾区环境。90~70~50 km/h 逐级限速方案在清晰区的整体速度波动最大,速度调整更为剧烈,而在限速区和雾区内,并未因为限速措施及雾天环境的影响而导致速度波动,从而保证了不同限速策略下雾区行驶的稳定性。
(2)从驾驶人的响应快速性可知,90~70~50 km/h逐级限速策略在清晰区的平均减速度更大,达到稳定状态的峰值时间更短;从驾驶人的响应稳定性可知,90~70~50 km/h逐级限速策略在雾区中的车辆稳态频数最大,空间稳定性更好;从驾驶人的响应准确性可知,90~70~50 km/h逐级限速策略在雾区中的速度超调量和跟随比最小,响应准确性更高。
(3)雾天桥梁可变限速模糊综合评估结果表明,在雾天能见度100 m的条件下,90~70~50 km/h逐级限速策略为最优方案,该方案能够有效地降低驾驶行为激变导致的风险,从而提升雾区安全性和通行效率。
文中结合反馈控制原理,从系统的“快、准、稳”层面提出了针对雾天桥梁可变限速的综合评估及优化设置方法,该方法可有效支撑雾天桥梁交通安全的风险防控,进而泛化推广至应用可变限速实现速度控制的相关应用领域。此外,文中方法仅考虑了雾天能见度100 m 的条件,但在实际中雾天的能见度是多变的,未来可研究不同能见度下的限速方案;文中方法尚未考虑不同驾驶人特性与限速效果的关联关系,未来可进一步扩充样本量,探究驾驶人个体特征对限速策略的作用效果;文中仅在驾驶模拟实验环境下验证了限速方案的有效性,未来可与实车实验进行对比,以提升研究成果的可靠性。
猜你喜欢
阅读(科学探秘)(2021年10期)2021-03-08
湖南教育·A版(2019年4期)2019-05-10
小学生学习指导(低年级)(2019年4期)2019-04-22
电子制作(2019年24期)2019-02-23
西南交通大学学报(2018年5期)2018-11-08
成都信息工程大学学报(2018年1期)2018-05-31
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20
知识产权(2016年8期)2016-12-01
山东工业技术(2016年15期)2016-12-01
交通科学与工程(2015年1期)2015-12-23